
基于事件本体的CGF飞机实体作战计划模型
2014-03-24 02:38刘文彪杜彬彬彭四喜
海军航空大学学报 2014年5期
张 媛,刘文彪,杜彬彬,彭四喜
(1.海军航空工程学院a.兵器科学与技术系;b.指挥系,山东烟台264001;2.72283部队,山东烟台264001)
作战仿真中,作战实体一般由仿真操控人员通过脚本的形式给出实体的作战计划,并由作战仿真系统或虚拟战场环境仿真系统实施。随着仿真规模的不断扩大,对计划的可执行性、互操作性的要求不断提高,对实体的智能性要求也越来越高。为满足上述需求,采用本体技术对作战计划进行建模是当前计划建模的一个重要研究方向。
1 作战计划本体建模中存在的问题
从目前的研究来看,作战计划建模主要存在以下2方面问题:
1)缺乏全面、详细的可参考的理论和可重用的计划本体。虽然文献[1]提出的时间CSP方法接近于自然语言处理方式,但是对计划内的任务和动作的时间规划考虑不全面。同时,除了文献[2]对作战计划本体的历史、技术和现有的作战计划本体进行了概括的论述与比较外,很少有完整、全面的作战计划本体建模理论和可参考的计划本体模型。
2)国内目前的研究还没有对作战计划本体建模进行系统的分析和研究。军事领域的计划本体建模也处于起步阶段,除国防科技大学相关研究外[3-4],还没有更深入、全面的作战计划本体模型。
针对以上问题,重点结合BDI Agent模型,对虚拟战场环境中智能实体推理过程进行分析,利用本体刻画作战实体的思维状态,建立作战实体的作战计划本体。文中提出的作战计划本体及其定义的动作之间的关系可以为实体认知世界,产生对目标的计划并付诸实施提供新的途径。
2 基于BDI Agent的作战实体模型
Agent的主要特点是模拟(模仿)人类的思维状态:认知、情感、意图等。Agent 决策过程依赖于表达Agent 信念、愿望和意图的行为来实现。基于过程推理(Process Reasoning System,PRS)是BDI Agent 实现的一种途径。图1是基于PSR的BDI Agent结构[5-6],其中,信念表示Agent对外界(包括环境和其他Agent)的认识和判断;愿望表示Agent 希望达到的目标的可能路径;意图表示Agent为实现承诺而将要采取的行为的计划;规划是Agent的思维状态的体现,是判断、思考和决策的过程;解释器负责协调、调度4者之间的关系。
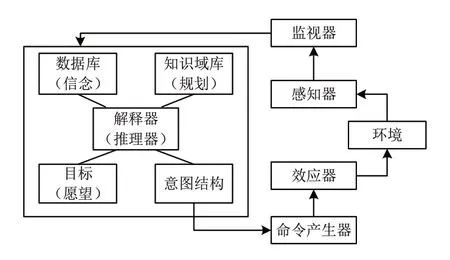
图1 BDI Agent结构图Fig.1 Structural drawing of BDL Agent
3 CGF飞机实体作战计划本体模型
3.1 基于事件的CGF飞机实体本体模型
时间和空间模型是虚拟战场环境本体建模中的一个最基本属性,采用时间和空间模型描述战场环境中的对象间的关系是虚拟战场环境本体建模中必不可少的要求。本文不采用时间和空间相结合的方法建立时空统一的本体模型,而是基于“时间和空间是事物的存在的基本方式”这一观点,将事物(对象)及其产生的事件,以及发生事件时的时间和空间状态、关系相结合,将文献[7]提出的基于事件的BDI Agent结构用于作战实体模型,与图1和图2的BDI Agent和基于BDI的作战实体模型相结合,建立基于事件的CGF飞机实体思维模型,如图2所示。

图2 基于事件的CGF飞机实体思维模型结构Fig.2 Structure of CGF aircraft entity thinking model based on event
该模型中,所有的交互都通过事件进行。CGF实体推理和决策的核心仍然是规划和调度。输入事件即是CGF实体对外部世界的感知过程,可以理解为态势感知。态势感知是CGF 实体获得外部世界环境状况的唯一途径。计划以独立形式成为CGF 实体的一个组件。愿望是行动目标的集合,通过规划和调度获得作战计划。意图则负责从已有的计划中选择并进行执行,意图还负责对信念和愿望中的目标进行更新。
3.2 作战计划本体模型
作战计划建模是与作战相关知识的描述并形成行动纲要的过程。基于本体技术的作战计划建模即利用本体建模思想,通过构建本体来对作战计划相关的概念、关系、属性、实例、公理等进行定义,以提供作战可重用、易执行的行动规范,满足实体智能推理和决策的需要。
定义1:作战计划本体,
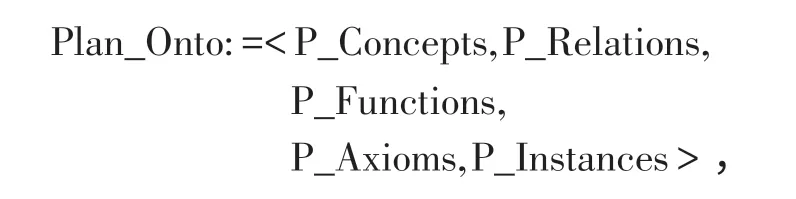
其中:P_Relations表示关系集合;P_Functions表示函数集合;P_Axioms表示公理集合,P_Instances表示实例集合;P_Concepts表示作战计划中概念的集合,
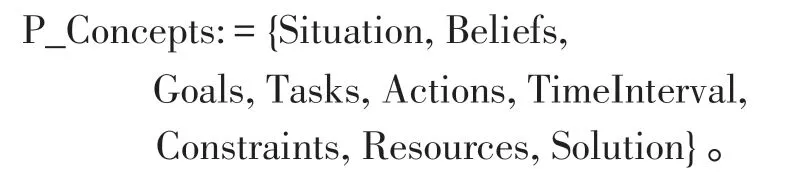
其参数描述如下:
1)Situation(态势),计划执行时的世界初始状态(战场态势)。
2)Beliefs(信念),执行作战计划的实体(Agent)对世界(战场环境)的信念,是作战实体通过世界初始状态形成对作战环境的认识,对战场态势的理解以及对自身作战能力的认知。
3)Goals(目标),描述通过执行作战计划,期望世界所达到的状态。态势和环境满足如下公式:
Plan:Situation →Goals ⊆Situation,
即计划将态势映射为目标,目标是态势的子集。作战目标是执行作战计划后期望达到的一种态势。
4)Tasks(任务),Tasks:={tk1,tk2,…,tkn}。为达到即时目标需要完成的任务。任务应具有层次属性,并具有序列。即tki可以继续分解为低一层的任务集,并且如果tk1需要在tk2前完成,则未完成tk1的情况下,tk2不能被执行。但也存在并行情况,如火力打击同时进行电子干扰,需根据实际情况决定。
5)Actions(动作),对于每个任务tki,有有限个动作{a c1,ac2,…,acn} 完成该任务;aci是已分解完成的原子动作,如实体移动到指定位置,火炮开火等。
6)Time Interval(时间区间),TimeInterval:={Stat,End}。
Start、End为完成计划的起点时间和终点时间。
7)Constraints(约束),作战计划不能违反的规定和完成计划的边界条件。约束包含对公理(P_Axioms)和规则(Rules)的定义。
8)Resources(资源),完成作战想定需要消耗的物资等。
9)Solution(结论),计划是否完成,可将结论定义为二元组{True,False}[8],度量计划是否实现作战目的(Goals)。
定义2:公理,P_Axioms={Axioms},是虚拟战场环境中的永真断言,是对概念间关系的约束,表示军事、作战领域概念、关系等描述的公理,包括关于作战和武器装备的实例和断言。例如,任务与资源匹配、任务与动作等。
1)任务与资源匹配。该公理定义了资源消耗/使用的原则,即何种资源与何种任务匹配,如飞行与燃油消耗匹配,对舰攻击与反舰导弹匹配等,

2)任务与动作。该公理规定了如果存在任务ti,该任务具有与之相关的动作序列{a1,a2,…,an},则ti的前件必须包括第一个动作a1,ti的后件必须包括最后一个动作an[9]:

定义3:规则,包括对资源和约束的判定,决定动作序列和任务顺序。规则可以由函数表示:

利用函数可以定义作战计划中的各种规则。
时间、约束、规则规定了作战计划能够在指定的时间内被完成或不能被完成,保证其时间有限和可实现,不会进入无解情况。
定义4:关系,
P_Relations:={R(c1,c2)| c1,c2∈P_Concepts}。
表示关系集合,包括继承、聚合、组合和关联。
1)继承关系,子类继承父类中包含的属性、关系和方法。
2)聚合关系,表示一个概念拥有但可能共享另一个概念。如4架飞机组成空中编队。
3)组合关系,是一种强的聚合关系,是整体与部分的关系。如雷达、火炮、指控系统组成火力系统。
4)关联关系,表示概念间的相互作用关系,也可定义为概念的属性。定义计划中的关联关系包括:机动(Movement)、火力(Firepower)、防护(Defense)、保障(Logistics)和电子战(Electronic Warfare)等[4]。
定义5:实例,
P_Instances:={I|I ∈P_Concepts ⋃P_Relations}
是虚拟战场环境概念和关系的实例化表示。例如某一型号的舰空导弹、雷达等。
作战计划本体模型如图3所示。
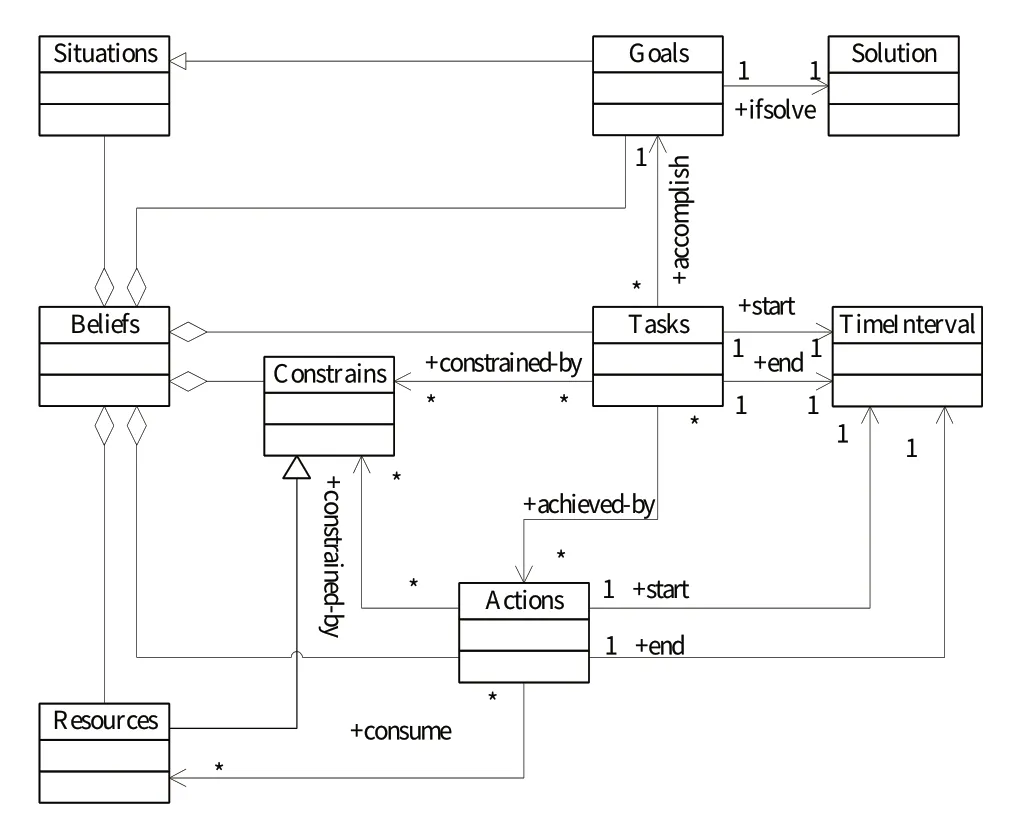
图3 作战计划本体模型Fig.3 Model of operation plan ontology
1)作战实体具有对态势、目标、任务、约束、动作(能力)和资源的信念,信念以知识库的形式表示,并能够通过规则、逻辑等与态势和计划进行匹配,以形成认知。
2)任务和动作应当由时间区间约束其开始和终点时间。通过规划可以形成计划内部对任务和动作的序列关系,其关系应满足Agent的13种时间区间关系[10]。
3)任务和动作具有约束,约束以函数、规则或公理的形式给出。
4)动作需要消耗资源。
5)资源是一种约束。
3.3 作战计划中的动作关系
3.3.1 动作的时空属性
动作的空间属性与产生动作的作战实体紧密关联,动作从时间属性可以划分为:瞬时动作和持续动作。
瞬时动作是以时间点描述的动作称为瞬时动作,即瞬时动作只能以一个有效的时间点描述,除此点之外的任意时间中不存在此动作,
持续动作是以时间区间描述的动作称为持续动作,其动作的执行总有其起始和终止时刻,

其中,TakeplaceDuring(Ac,T)定义为:

瞬时动作可以认为是开始和结束时间相同的持续动作,例如飞行。
上述时间区间∃T:=[t1,t2]∈{Intervals}可以由直达关系Through(t1,t2)描述。动作发生的空间属性主要指动作发生的空间位置、路线和区域。
3.3.2 动作之间的关系
瞬时动作包括顺序和同时2种情况,其时间序列描述为:S(t)={t1,t2,…,tn},其中t0≤t1<t2<…<tn≤t。
持续动作之间的关系包括因果、顺序和并行3种关系。
1)因果关系。即如果动作Ac2的实现必须以Ac1的实现为其前提条件,则存在因果关系:
即 Ac1和 Ac2互为前件(Pre_con)和后件关系(Post_con)。
2)顺序关系。顺序情况下后一个动作必须在前一个执行完成之后方可进行,满足{<,m,mi,>}4种时间关系。其中(<,>),(m,mi)是2个逆对称对。在时间限制不十分严格的情况下,前2 者可以合并为一种关系,后2 者亦然,分别Bf 和Af定义。顺序动作Ac2在Ac1后执行有:
其中,函数Follows(Ac2,Ac1)表示Ac2在Ac1后执行,Bf(Ac1,Ac2)表示Ac1在Ac2前进行,Af(Ac2,Ac1)表示Ac2在Ac1的后进行,不考虑端点交互情况。
3)并行关系。并行情况描述动作Ac2在Ac1执行的同时也执行。并行情况利用{o,fi,di,s,=,si,d,f,oi}时间关系描述,则为逆对称,“=”与其自身逆对称。如,作战实体移动同时进行通信,一般情况,通信过程在移动过程中完成,利用关系d(during)描述:

4 仿真实例
假设在VR-Forces仿真平台上实现的现有作战想定,如图4所示。其中,L1表示CGF 飞机实体空中突击编队突击方向,Return表示返航方向。J1是S 编队无源干扰区域,Am2是近防炮防御区域,Am3是防空导弹防御区域,R4是警戒雷达搜索范围。
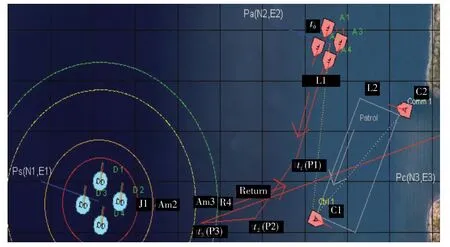
图4 想定示意图Fig.4 Schematic diagram of scenario
1)CGF 飞机实体由突击编队和指挥编队两种编成方式。其中突击编队由3 架装备雷达(Ra),火控系统(Fa),反舰导弹(Ma),通信设备(Ca)的攻击飞机(A1~A3)与1架挂干扰吊舱(Ja)等武器装备的随队干扰飞机(A4)组成;而指挥编队则由2架装备通信设备的指挥巡逻机(C1、C2)组成。
2)位置:突击飞机编队t0时刻位于海域Pa,中心位置为(N2,E2,H2);指挥编队位于海域Pc,初始位置为(N3,E3,H3);。
3)计划:突击编队,无线电静默,按L1航线超低空突击S 编队。t1时刻到达位置P1,转航向;t2时刻到达位置P2通信,从指挥机获得目标指示,转攻击航向;A4 干扰开机,对S 编队实施有源干扰;t3时刻到达发射位置P3,雷达开机搜索、锁定目标,导弹齐射;发射完成后,返航;指挥编队双机按L2航线巡航,共同完成全时段全区域目标监视和指示,C1负责战场通信联络与指挥,C2辅助C1提供目标指示,最终实现突击编队重创S编队的目的。
4.1 作战计划描述
战场环境:时间、海域、自然环境,兵力部署(类型、位置)。类集:作战平台、武器装备、资源等。属性集:作战平台和武器装备的位置、速度、姿态、状态(是否被摧毁)、兵力属性(红蓝);资源数量、消耗率等。关系集:继承、聚合、组合、关联。任务集:按航线飞行→到达指定空域→接收目标信息→雷达开机发现目标→导弹发射→返航。动作集:飞行、通信、发射、消耗。资源集:燃油数量、导弹数量。
规则集如下:
1)如果未到达联络位置且未到达攻击位置,则继续飞行:
2)如果到达联络位置P1或P2,则进行通信联络:

3)如果到达联络位置P3,且目标在攻击范围内,则发射反舰导弹:

4)如果反舰导弹发射,则返航:

4.2 突击飞机CGF实体作战计划本体模型
根据CGF飞机实体作战计划描述,利用Protégé本体建模工具,建立对舰突击飞机作战计划本体模型以及相应的Protégé实现类图,分别如图5和图6所示。
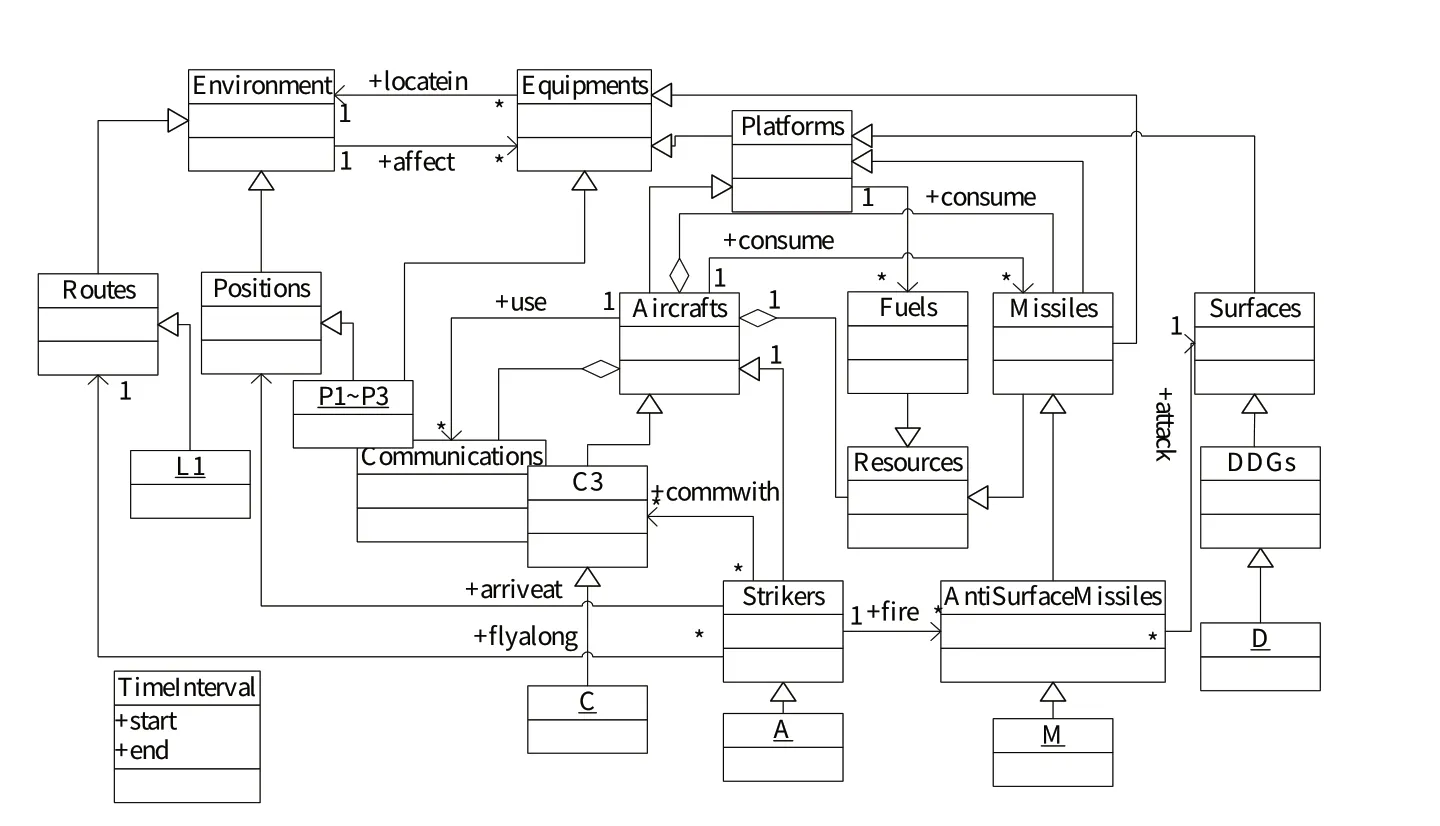
图5 对舰攻击飞机计划本体模型Fig.5 Model of operation plan ontology for strike aircraft

图6 作战飞机本体的protégé类图Fig.6 Classes of aircraft SAW ontology with protégé
5 小结
结合BDI Agent模型,建立了基于事件的作战飞机CGF 实体的作战计划模型。利用本体刻画该模型中作战飞机CGF实体的思维状态,对CGF作战飞机实体描述世界所需的概念、关系、公理等内容进行相应的定义,同时给出作战飞机CGF实体计划进行过程中的事件之间的时序和因果关系。应用实践证明,文中提出的基于事件本体的CGF 飞机实体作战计划模型可为虚拟海战场综合环境建模和仿真中的作战实体作战计划提供语义上的支持,提高了CGF实体的智能水平和对战场环境的认知能力,为CGF兵力实体认知世界,产生对目标的计划并付诸实施提供新途径。
[1]JIN SONGDONG.Timed formalisms for plan ontology and processes,XC064008[R].Singapore:National University of Singapore,2007:21-41.
[2]BOURY-BRISSET AC,CHAMPAGNE C.Ontological models for military courses of action[R].Canada:Defence Research and Development,2006:123-130.
[3]罗旭辉,刘忠,张维明.层次任务网络的作战计划建模及生成技术[J].火力与指挥控制,2009,34(12):22-26.
LUO XUHUI,LIU ZHONG,ZHANG WEIMING.Research on modeling and generation of operational plan based on hierarchical task_netwark[J].Fire Control &Command Control,2009,34(12):22-26.(in Chinese)
[4]刘忠,钱猛,黄金才,等.基于语义推理的作战计划验证方法[J].系统工程与电子技术,2010,32(5):988-993.
LIU ZHONG,QIAN MENG,HUANG JINCAI,et al.Semantic reasoning based approach to COA Vatidation[J].System Engineering and Electronics,2010,32(5):988-993.(in Chinese)
[5]MICHAEL P GEORGEFF,FRANCOIS FELIX INGRAND.Decision-making in an Embedded Reasoning System[C]//Sridharan N S.Proceedings of the 11th International Joint Conference on Artifical Intelligence.San Mateo:Morgan Kaufmann Publisher,1989:972-978.
[6]石纯一,张伟.基于Agent的计算[M].北京:清华大学出版社,2007:120-136.
SHI CHUNYI,ZHANG WEI.The calculate based on agent[M].Beijing:Tsinghua University Press,2007:120-136.
[7]BUFORD J,JAKOBSON G,LEWIS L.Extending BDI multi-agent systems with situation management[C]//Information Fusion,9th International Conference.2006:1-7.
[8]BOURY-BRISSET A C.Ontological approach to military knowledge modeling and management,RX045109[R].Canada:Defence Research and Development,2004:1-13.
[9]NORBERT BAUMGARTNER,WERNER RETSCHITZEGGER.A survey of upper ontologies for situation awareness[C]//International Conference on Knowledge Sharing and Collaborative Engineering.2006:1240-1329.
[10]ALLEN J F.Maintaining knowledge about temporal intervals[J].Communications of the ACM,1983,26(11):832-843.
猜你喜欢
哈哈画报(2021年10期)2021-02-28
中国外汇(2019年18期)2019-11-25
小型微型计算机系统(2019年6期)2019-06-06
当代陕西(2019年5期)2019-03-21
北京航空航天大学学报(2017年3期)2017-11-23
领导决策信息(2017年9期)2017-05-04
领导决策信息(2017年9期)2017-05-04
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2017年10期)2017-04-20
海军航空大学学报(2015年4期)2015-02-27
