
一类奇异Liénard系统的鸭环的存在唯一性
2014-03-20 02:06:58尚德生
山东理工大学学报(自然科学版) 2014年4期
尚德生
(山东理工大学 理学院, 山东 淄博 255091)
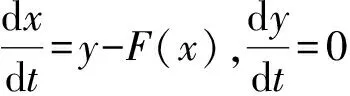
在文献[1-2]中,作者利用Blow-up等技巧讨论了在函数F(x)满足什么条件,下面的奇异摄动Liénard系统
会有鸭环存在,其中F(x)是光滑函数,ε>0是个小参数,λ>0而且系统(L)的鸭环的个数可以由系统的慢散度积分
(1)
的零点来衡量,其中Ω是经过 (0,Y)的快轨道的两个端点(x1(Y),Y),(x2(Y),Y)之间的部分慢轨道,如图1所示.
具体结论是
引理1如果F(x)是一个Morse函数,而系统(L)以原点(0,0)为转点,且满足F(0)=0,F′(0)=0,F″(0)≠0,则系统(L)的环性可以由前面的慢散度积分(1)的零点的个数来确定,且其鸭环的稳定性可以由I(Y,λ)关于Y的导数的符号来确定.

图1 系统(L)在ε=0时的轨迹示意图
(2)由含有快轨道和慢轨道一起构成的闭曲线环称为系统(L)的一个快慢环(Slow-Fast Cycle),也称为鸭环(Canard Cycle).
(3)系统(L)的一个鸭环与前面的慢散度积分的一个零点相对应,且其稳定性与I(Y)的导数的相应,即当I(Y)=0,I′(Y)<0时,对应于系统(L)的一个过 (0,Y)的稳定的鸭环,当I(Y)=0,I′(Y)>0时,对应于系统(L)的一个过 (0,Y)的不稳定的鸭环.
下面对一种特殊的Morse函数F(x),来讨论系统(L)的环性,这里取

在区间(0,λ)∪(λ,+∞)上的零点即可.
注意到G(0)=0;当z→λ时,G(z)→-∞;且z→+∞时,G(z)→+∞.
又因为
G′(z)=z2n-4+λ2z2n-6+…+
显然,当z∈(λ,+∞)时,有G′(z)>0,即G(z)在区间(λ,+∞)单调递增.但是当z∈(0,λ)时,容易得到
从而G(z)单调递减,亦即有G(z)
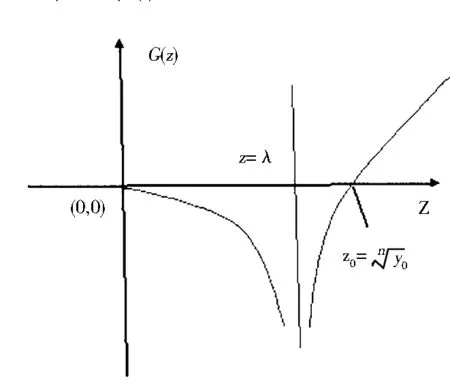
图2 G(Z)的图形示意图
从而系统(L)在(0,+∞)上有且只有一个鸭环,且该鸭环是不稳定的,它包含系统(L)的唯一奇点(λ,F(λ)).另一方面,可以得到在该奇点处系统(L)的散度为
div(L)=-F′(λ)=-nλn-1<0
即系统的这个唯一奇点是稳定的焦点,这也说明这个唯一的鸭环是不稳定的.由此得到下面的结论.
定理1对于任意的正整数n≥2相应的函数F(x),奇异摄动系统(L)在整个xoy-平面上有且只有唯一一个不稳定的鸭环存在,此鸭环包含系统的唯一稳定的有限远奇点(λ,F(λ)).
[1] Dumortier F, Roussarie R. Canard cycles and center manifolds[J]. Memoirs of Amer. Math. Soc, 1996,121:1-100.
[2] De Maesschalck P, Dumortier F. Singular perturbations and vanishing passage through a turning point[J]. Differential Equations,2010,248(9):2 294-2 328.
猜你喜欢
数学年刊A辑(中文版)(2022年1期)2022-08-20 08:50:04
小学生学习指导(爆笑校园)(2021年10期)2021-11-01 08:43:58
小学生学习指导(爆笑校园)(2021年9期)2021-09-27 03:45:38
小学生学习指导(爆笑校园)(2021年4期)2021-04-29 09:34:02
军事文摘(2020年14期)2020-12-17 06:27:46
数学小灵通(1-2年级)(2020年9期)2020-10-27 03:24:18
数学物理学报(2019年6期)2020-01-13 06:08:08
当代贵州(2019年41期)2019-12-13 09:28:56
数学物理学报(2018年3期)2018-07-17 06:15:30
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:12
