外科手术机器人发展及其应用
2014-03-16 07:52杨爱华赵惠康
中国医学教育技术 2014年3期
龚 朱,杨爱华,赵惠康
同济大学附属同济医院,上海 200065
外科手术机器人是集临床医学、生物力学、机械学、材料学、计算机科学、微电子学、机电一体化等诸多学科为一体的新型医疗器械,是当前医疗器械信息化、程控化、智能化的一个重要发展方向,在临床微创手术以及战地救护、地震海啸救灾等方面有着广泛的应用前景。
进入新世纪以来,外科手术微创化,微创手术精细化、立体化,如同一股新浪潮席卷全球的外科学界,并渗透到普通外科、心脏外科、胸外科、泌尿外科、脑外科、骨科等各临床专科,动摇着并逐渐替代已沿用百余年之久的经典的传统外科手术方式。微创外科不仅引发了外科学领域的一场新技术革命,而且正在结合自动机械技术、远程通讯和计算机技术,开创一个机器人外科的新时代[1]!
1 外科手术机器人概况及其应用
1.1 达芬奇机器人微创外科手术系统
达芬奇机器人微创外科手术系统(da Vinci Si HD Surgical System)是目前世界范围应用广泛的一种智能化手术平台,2000年获得美国食品与药品监督管理局(FDA)批准,成为进入临床外科的智能内窥镜微创手术系统。适合普腹外科、泌尿外科、心血管外科、胸心外科、妇科、五官科、小儿外科等进行遥控微创手术。该系统的手术操作部分已可完成7个自由度的操作,由外科医师在远程工作站进行遥控,具有整合三维成像、触觉反馈和宽带远距离控制等功能[2]。
达芬奇微创外科手术机器人高达1.8米,重达500公斤,由医师卧式操作控制台、立式机械手术臂、轮式标准仪器柜三大部分组成(如图1显示)。这种外科手术系统的最大特点是:采用了医师座式姿态(远程)遥控机器人系统进行手术,这样的手术方式突破了传统的手术方式,由“触觉外科”向“视觉外科”转变,标志着人类微创外科技术的革命性飞跃。

图1 da Vinci SiHD Robot Surgical System
其核心技术是:
1.1.1 3DHD高清手术视野(视觉) 该系统具有6-10倍的三维高清手术视野,可为医师提供身临其境的手术临场沉浸感,提供清晰细致的解剖组织结构图像与自然的深度感觉空间,还提供了无与伦比的术野视觉感[3]。
1.1.2 EndoWrist仿真机械手 该系统可提供比人手自由度更广泛的动作。具有7个自由度,包括臂关节上下、前后、左右运动与机械手的左右、旋转、开合、末端关节弯曲共7种动作。可作沿垂直轴360°和水平轴270°旋转,且每个关节活动度均大于90°。尤其在行深部操作时,机械手由于动作灵活,体积小巧,与开放手术的人手操作相比具有显著优势。EndoWrist仿真机械手配置了各类型手术器械,可满足抓持、钳夹、缝合等各项手术操作要求,也可满足胸心外科、普腹外科、泌尿外科、妇产科等各种手术的操作需求。各种类型手术器械手均有8 mm和5 mm两种规格[3]。
1.1.3 Intuitive直觉运动控制技术 Intuitive是达芬奇机器人独有的计算机辅助控制技术。眼-手协调、手-机械手端实时同步,使得医师可以凭借本能进行直觉式的操控机械手端。手术医师手指动作的运动行程与机械手端的运动行程比例可以调节,现有3种缩小比例,即5∶1、3∶1和1∶1。该技术将术者手指动作的幅度自动缩小,使手术操作更加稳定精细。手术医师的手部抖动信号会被自动过滤[3]。
1.1.4 达芬奇外科机器人手术系统临床应用 达芬奇机器人外科微创手术系统是21世纪微创外科技术、远程遥控手术技术的革命性标志,代表了当今世界最先进的外科医疗技术。
目前,在美国泌尿外科领域,有50%的病人选择达芬奇外科机器人手术。与常规泌尿外科腔镜手术比较,达芬奇机器人外科微创手术系统,提供3DHD高清晰度图像,6-10倍的放大倍率,自然的深度感觉,使手术医师能够精细处理解剖组织,尽可能不碰伤手术周围组织,如:在前列腺癌手术中不碰伤前列腺附近的神经血管束、副交感神经,等,以保全患者性功能。美国85%以上的前列腺癌根治术已使用达芬奇手术机器人完成。
另外,美国还采用达芬奇机器人打造新型战地医院。2005年3月28日,美国有关大学和斯坦福国际研究所(SRI International)与美国国防部签订了机器人医师的研制协议[4]。这项名为“外伤豆荚”的计划预计将耗资1 200万美元、历时两年完成。机器人外伤救治体系是在达芬奇外科手术机器人系统基础上更进一步研究适用于战场的机器人手术医师。
2009年美国斯坦福国际研究所开发出流动“外伤救治舱”(Trauma Pod)[5],并将达芬奇机器人安装在改装的美军“布拉德利”(Bradley)装甲车上送往前线。医师护士远离战场,通过卫星联网,遥控达芬奇机械人给战场伤员注射麻醉剂,实施手术,挽救伤员生命,以减少美军官兵在战场上的伤亡人数。“外伤救治舱”遥控手术设计如图2所示:①远离战场的外科医师(人):用声控监视器和遥感通过卫星连接遥控外伤救治舱(Trauma Pod)机器人;②机器人一个机械臂安置摄像机和内窥镜,另外两个机械臂可以是手术刀或者是手术钳和针;③手术床监视伤兵的重要信息并控制生命维持系统;④机器人器械柜放置各种手术用机械臂;⑤擦洗护士:声控的机械臂,从器械柜抓取机械臂,并提供给操作的机器人。
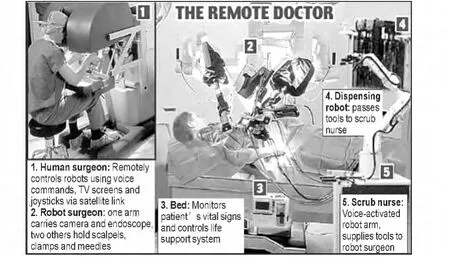
图2 美国新型战地医院“外伤救治舱”模式图
截止2013年3月31日,全球达芬奇外科手术机器人系统装机总数为2 710台。其中,美国:1 957台(占72.2%);欧洲:430 台(占15.9%);亚洲:220 台,(其中中国香港8台)(8.1%);其他地区:103台(占3.8%)[6]。2011 年,全球各国完成达芬奇机器人手术共计为36万例,2012年为45万例,年手术量同比增长 25%[3]。
1.1.5 达芬奇机器人微创外科手术系统在我国的应用 2007年1月25日,解放军总医院心血管外科高长青运用达芬奇外科手术机器人“da Vinci S”,为一名女患者成功实施不开胸的心脏手术。这是我国首例全部由机器人完成的心脏病手术。2008年,解放军总医院引进中国第一台达芬奇(da Vinci S)机器人外科手术系统。2010年以来,以解放军总医院、第二炮兵总医院、上海复旦大学附属中山医院、上海交通大学附属瑞金医院为代表,在心胸外科、肝胆胰腺等领域应用达芬奇(da Vinci Si HD)机器人微创外科手术方面,已进入世界前列。
2010年1月20日,中国微创机器人心脏外科培训中心在解放军总医院正式成立。来自美、法等7个国家的200多名专家共同在该院观摩“da Vinci Si HD”机器人心脏手术实况演示。截止2013年该中心已实施500例达芬奇机器人心脏手术,手术种类世界第一[7]。
截止2012年底,中国大陆(港澳台除外)配置达芬奇手术机器人的有14家医院,共安装达芬奇机器人外科手术系统15台。这些医院在2011年完成各类达芬奇机器人手术808例,2012年完成1 546例,年手术量同比增长91.3%。截止2012年底,国内历年累计完成达芬奇机器人手术3 551例[6]。
1.2 宙斯机器人手术系统
宙斯机器人手术系统(zeus robotic surgical system)是由美籍华裔王友仑先生于1998年在美国摩星有限公司研发成功。1999年获得欧洲市场认证,标志着真正的“手术机器人”进入全球医疗市场领域。进入中国市场的宙斯机器人手术系统包括:伊索(aesop)声控内窥镜定位器、赫米斯(hermes)声控中心、宙斯(zeus)机器人手术系统(左右机械臂、术者操作控制台、视讯控制台)、苏格拉底(socrates)远程合作系统这几部分组成。
手术时,宙斯机器人三条机械臂固定在手术床滑轨上,医师坐在距离手术床2-5m的控制台前,实时监视屏幕三维空间立体显示的手术野情况,用语音指示Aesop声控内视镜,另外两条宙斯黄绿机械臂则在医师遥控下执行手术操作,医师足部脚踏板控制超声波手术刀完成手术的烧灼、切割、电凝等工作。
宙斯机器人监控屏上手术画面能放大15-20倍,并可模拟医师的手部动作,宙斯手术抓持手是仿照人类手腕设计的机械手,能够做抛掷、推动、紧握等动作,可以使医师从5-8mm的小切口进入病人体内进行微创手术。这给许多本来需要传统开放手术的患者无疑带来很大的福音。
1.2.1 宙斯机器人手术系统应用—一次横跨大西洋的机器人辅助远程手术 2001年9月7日,美法两国医师实施了一次横跨大西洋的机器人辅助远程手术,由法国医师杰西奎·马雷斯科(MD.Jacques Marescaux)在纽约西奈山医院(Mount Sinai Hospital NY.)操纵着宙斯(Zeus)机器人(如图3所示),法国电信公司开通一条基于(asynchronous transfer mode,ATM)高速光纤专线(10Mb/s),通过大西洋海底光缆链接到法国东部斯特拉斯堡大学医院远程遥控宙斯机器人3条机械臂,为一位68岁法国妇女作胆囊切除术(如图4所示)。这次手术用了54分钟,术后病人情况良好,48小时之后病人出院[8]。
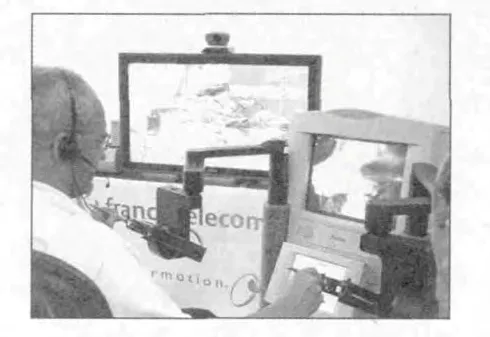
图3 马雷斯科医师在纽约遥控宙斯机器人为法国一位妇女实施胆囊切除术

图4 法国斯特拉斯堡医院遥控宙斯机器人胆囊切除现场 2001.09.29.《新民晚报》
越洋手术成功的一个关键是解决延时信号(Key to oversea surgery-solution to signal delay)问题。纽约至法国斯特拉斯堡远程遥控手术视频图像信号传输相距14 000公里,并且,穿越大西洋海底,法国电信公司开通一条基于ATM高速光纤专线(10Mb/s),手术图像往返的传输几乎是瞬间完成的。也就是说,马雷斯科医师在纽约遥控斯特拉斯堡手术台上的3条宙斯机械臂的手术动作,几乎是即刻反馈在纽约的监控屏幕上,仅有约155毫秒的延迟,远远低于原来估计的330毫秒的安全延迟时限范围之内[8]。
为了此次越洋手术,医疗小组前后共进行了两年的时间准备,历经无数次的各种试验考验[8]。
1.2.2 宙斯机器人手术系统在我国的应用 2004年4月,深圳市人民医院引进宙斯机器人手术系统,周汉新团队完成国内第一台宙斯机器人辅助胆囊切除术。该院温定国团队完成国内首例宙斯机器人辅助心脏搭桥术[9]。
1.3 伊索机器人手术辅助系统
伊索声控机器人手术辅助系统Aesop 1000也是由王友仑先生所在的美国摩星公司于1994年10月研发成功,1996年11月第二代Aesop 2000研发成功。目前,在中国各大医院仍在使用的多为第四代Aesop 3000,重约17公斤。主要由机械手掌、机械臂、机械躯体和电脑语音识别系统几部分组成。Aesop实际上只是一种具有语言识别能力的内窥镜定位器声控自动装置。医师在手术前把各种指令记录在一张声卡上,手术时只需将这张声卡插入Aesop机器人的控制盒内,手术医师就能用声音直接控制Aesop内窥镜的各种动作。如:“move in(前进)、move back(后退)、move left(左移)、move right(右移),等,它能听懂几百条指令,常用指令约30条”。
1.4 伊索机器人手术辅助系统在我国的应用
2001年起,Aesip 2000及Aesop 3000先后进入中国医疗领域,并先后完成以下手术,如:2001年6月,无锡四院子宫切除术和胆囊切除术;2002年3月,山东省胸科医院冠状动脉搭桥术;4月,复旦大学附属儿科医院3岁儿童的先天性室间隔缺损修复术;2003年6月,上海市第一人民医院心脏二尖瓣膜置换术;2005年7月,复旦大学附属中山医院的第10例7岁儿童房缺封堵术;2008年,湖南省儿童医院小儿巨结肠术。该院自投入300多万元从美国引进Aesop 3000运用,至今已行各种手术近千例[10]。2012年中国煤炭神马医疗集团总医院应用Aesop 3000机器人施行各种胆囊疾病微创手术418例的报道。Aesop声控机器人弥补了常规腹腔镜、胸腔镜光学内镜视角狭小、手持晃动引起头晕眼晃等不足,提高了微创手术的疗效。
2 中国远程遥控机器人概况
2.1 中国远程遥控机器人—“黎元BH-600”声控机器人
2001年,解放军海军总医院田增民神经外科团队与北京航空航天大学中国航天技术研究所合作,研发成功“黎元BH-600”声控机器人。并于2003年9月10日,在北京海军总医院通过互联网链接到相距600公里外的沈阳医学院附属中心医院手术室,为一位52岁的脑溢血患者实施微创手术,成功实施了国内第一例脑外科立体定向远程遥控手术(如图5所示)。

图5 “黎元600”机器人北京链接沈阳遥控手术实况
上午10点正,手术正式开始,田增民医师在北京手持鼠标发出指令,沈阳手术室里“黎元”机器人在一位脑溢血患者头部行校正、靶点定位后,钻出一个3 mm的小孔,将一根针管从小孔插到淤血里回抽出淤血。10点55分,手术圆满成功,病人的患肢肌力从二级提高到三级[11]。
2.2 国内第一例长骨骨折髓内钉内固定远程遥控操作手术
2006年3月,北京积水潭医院与北京航空航天大学合作,利用小型模块化机器人,在北京和延安之间完成了国内第一例长骨骨折髓内钉内固定远程遥控操作手术,提出并实现了基于窄带网络的远程规划理念,从而在一定程度上降低了远程遥控外科对网络配置的要求[12]。
2.3 我国自主研制成功首台微创外科手术机器人“妙手A”
“妙手A”系统是由天津大学、南开大学和天津医科大学总医院联合研制,是国家863计划和国家杰出青年科学基金重点支持项目。该系统主要用于腹腔微创手术,拥有多项技术创新和发明。如首次设计完成四自由度小型手术工具,可适应微创手术需求,并可完成复杂的缝合打结运动操作;采用多自由度丝传动技术,实现主、从操作手本体轻量化设计;基于异构空间映射模型,实现主、从遥操作控制;设计机器人系统与人体软组织变形仿真环境,实现主、从操作虚拟力反馈与手术规划;采用双路平面正交偏振影像分光法,研制成功微创外科手术机器人三维立体视觉系统[13]。
3 外科手术机器人应用前景与启示
医用机器人是当今世界各国的研究热点。国际先进机器人计划(international advanced robotics program,IARP)在欧美、日本等国已召开过多届医用外科机器人研讨会。像IEEE robotics and automation,IEEE Eng,in medicine and biology society,IEEE system,man and cybernetics等许多著名的国际会议,都将医用机器人与计算机辅助外科单独列为一个专题。
近年来,欧美诸国都进行专门立项投资,积极开展医用机器人方面的研究。2008年,美军在华尔特里德陆军医学中心(water reed army medical center,WRAMC)和约翰·霍普金斯医院(johns hopkins hospital,JHH)之间,两地相距64公里,采用达芬奇外科手术机器人系统,开展微创手术机器人远程外科项目。
目前,医用机器人技术在微创外科手术治疗、病人安全救援、无痛转运、康复护理、功能辅助及医院自动化服务等方面得到了广泛的应用,这不仅促进了传统医学的革命,也带动了新技术、新理论的发展。
如何将信息技术与数字化医学、3DHD和3D打印有机融入到自身的医学信息教育技术工作实践中去,将是当今每一位从事医学信息教育技术者所面临的新课题。
3D高清手术当前如火如荼地在全球医疗领域进行着,中国各大医院3D高清手术同样也是遍地开花。同济大学附属同济医院(临床医学院)从2009年起,至今已经连续举办了4届国家级3DHD高清手术转播系统学习班(今年将举办第5届),2013年投入500万专项资金建设一套3DHD高清手术转播系统和3DHD远程医疗示教系统,用于3DHD高清手术临床实践与医学信息教育技术专业人才培养,并与松下电器(中国)有限公司合作,正式签署协议,建立上海乃至全国临床医疗领域第一家“3DHD高清手术转播系统和3DHD远程医疗示教系统上海基地”。该文承蒙松下电器(中国)有限公司、美中互利上海公司等大力支持,在此一并致谢!
[1]周汉新.微创外科的明天—机器人手术[J].现代医院,2002,2(1):58-59
[2]刘术,蒋铭敏.美军机器人手术的研究现状及发展趋势[J].中国微创外科杂志,2007,(7):567-569
[3]Company Careers Products Training Support Clinical Evidence Media[EB/OL].www.intuitivesurgical.com
[4]王秀.美军耗资1200万美元研制机器人战地医师[EB/OL].www.southcn.com/tech/kjzxzx/swyy/200,2005-03-30
[5]唐华.美国打造新型战地医院从医师到护士都是机器人-国际在线[EB/OL].gb.cri.cn/23204/2009/03/06/2 805s 2449,2009-03-06
[6]金振宇.2012中国达芬奇手术机器人临床推广概述[EB/OL].http://blog.sina.com.cn/roboticsurgery,2013-07-20
[7]国家机器人心脏手术培训基地.实施350例全机器人心脏手术,手术种类世界第一[J].达芬奇之友,2012,(14):3
[8]Marescaux J,Gagner M.Ransatlantic robot-assisted telesurgery[J].Nature,413,379-380.2001
[9]刘丽.全国首例机器人手术成功“宙斯”其实很“温柔”[N].法制日报,2004-04-28
[10]唐江澎,李爱勤,蒋文君.“伊索”是只手术机器手[N].长沙晚报,2003-06-17
[11]耿旭,张静,陈浩,等.北京沈阳远隔600公里机器人黎元妙手回春[EB/OL].www.cnr.cn/home/colum,2003-11-26
[12]医疗机器人完成髓内钉远端锁定异地遥控操作手术[EB/OL].www.21ic.com/news/med/201112/997htm,2011-12-05
[13]冯国梧,宋雪峰.我自主研制成功首台微创外科手术机器人“妙手 A”[N].科技日报,2010-07-04
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中老年保健(2021年11期)2021-08-22
小哥白尼(军事科学)(2019年7期)2019-11-16
中国医药指南(2017年3期)2017-11-13
作文周刊·小学二年级版(2017年6期)2017-07-12
中国卫生(2016年6期)2016-11-23
幸福·悦读(2016年8期)2016-10-21
中国继续医学教育(2015年6期)2016-01-07
中国继续医学教育(2015年1期)2016-01-06
聪明语文(2013年3期)2013-05-20