
基于模糊滑模变结构控制的动态电压恢复器控制策略
2014-03-08 06:42周卫平吴正国
舰船科学技术 2014年4期
师 维,周卫平,吴正国
(海军工程大学电气工程学院,湖北武汉 430033)
基于模糊滑模变结构控制的动态电压恢复器控制策略
师 维,周卫平,吴正国
(海军工程大学电气工程学院,湖北武汉 430033)
动态电压恢复器(DVR)是保障电力系统电能质量经济有效的可行方案。本文在研究动态电压恢复器的电网电压前馈控制加负载电压与电容电流双闭环反馈控制相结合的复合控制策略的基础上,分析反馈控制中传统PI控制以及模糊控制的不足。经过理论分析提出基于模糊滑模变结构的控制方法。仿真结果表明,该方法使DVR有良好的动静态性能,并且较为理想地消除了传统滑模变控制的抖动现象。
动态电压恢复器;模糊控制;滑模控制;电压跌落
0 引言
动态电压恢复器 (Dynamic Voltage Restorer,DVR)可对电网电压进行动态补偿,解决电压暂降、突升,以及系统电压不对称、畸变等问题。
控制策略的合理选择是保证DVR补偿效果良好的重要条件。目前研究较多的控制策略包括前馈控制、反馈控制和双前馈加反馈复合控制等线性控制方式[1-2]以及无差拍控制、模糊控制、人工神经网络控制、空间矢量控制等非线性控制[3]。由于控制策略的合理与否往往直接影响DVR的补偿速度和精度,因此控制策略的研究是一个热点。
开环控制虽然动态性能良好,但是稳态误差较大、负载适应性较差、输出波形有畸变和相移[4]。为减小静态误差,在工程应用中多采用闭环控制器,并使用PID控制实现。但是逆变器等非线性器件使得PID控制抗干扰能力以及负载适应能力变差。滑模变结构控制方法是一种非线性控制,具有响应迅速、对参数变化及扰动不敏感、物理实现简单等优点。但是单纯的滑模控制,状态到达滑模面后抖振现象严重[5]。
本文基于无串联结构[6]的DVR系统在电网电压前馈控制加负载电压与电容电流双闭环反馈控制相结合的复合控制的基础上,提出一种DVR的模糊滑模变的控制策略。并对其控制效果进行仿真研究。仿真结果表明,本方法有效的降低了抖振,动态与稳态性能良好,具有较强的鲁棒性与实时性。
1 无串联变压器型DVR数学模型
三单相桥构成的无串联变压器型DVR结构如图1所示。3个单相桥可分别控制,控制方法灵活有效,可输出正序、负序、零序补偿电压,可对对称或不对称故障进行补偿。考虑到本文研究电网等级属于低压系统且负载对电压稳定性要求较高,故采用此种DVR拓扑结构。当DVR工作时,其单相等效电路图如图2所示。

图1 无串联变压器型DVR系统结构Fig.1 Transformerless DVR system structure
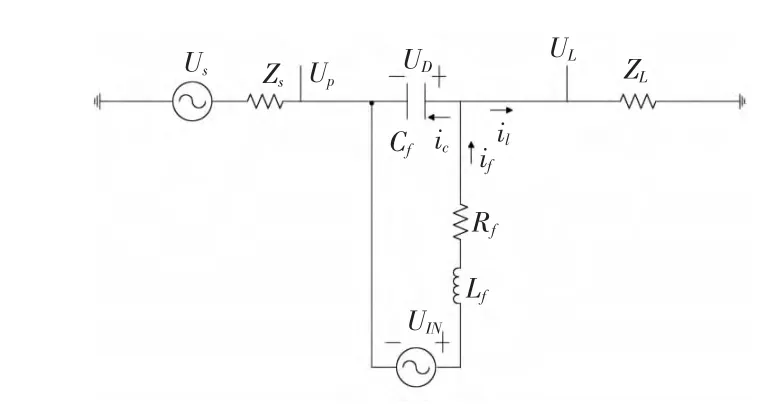
图2 无串联变压器型DVR单相等效电路图Fig.2 Transformerless DVR single-phase equivalent circuit diagram
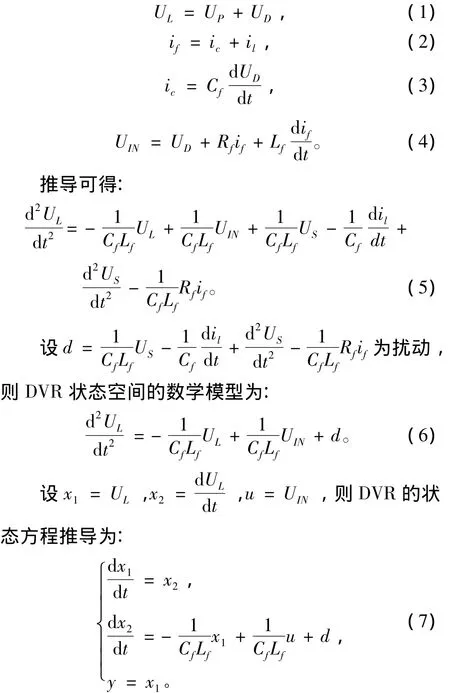
图中,US为电网系统电压;ZS为系统侧等效阻抗;UP为电网接入点电压;UD为补偿电压;UIN为逆变器输出电压;UL为负载电压;ZL为负载侧等效阻抗;Cf为滤波电容;Lf为滤波电感;Rf为滤波电感回路的线路电阻与逆变器有功损耗等效电阻之和;il,ic,if分别为负载电流、滤波电容电流和滤波电感电流。由图2可得单相电压恢复器的状态方程为:
2 DVR的模糊滑模控制器的设计
2.1 等效滑模控制器的设计
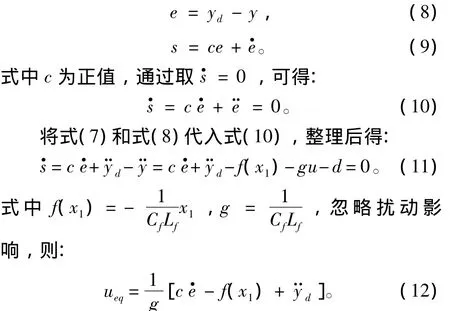
对于DVR系统,控制的目标是使负载侧电压UL跟踪给定参考电压Uref,即输出y跟踪给定目标yd=Uref。定义系统误差以及转换函数为:
2.2 滑模控制器的设计
为使系统在扰动下满足滑模可达条件,必须采用切换控制。为进一步消除抖振的影响,可将切换控制器设计控制律设计为:

2.3 稳定性证明
将式(15)代入式(11)有:
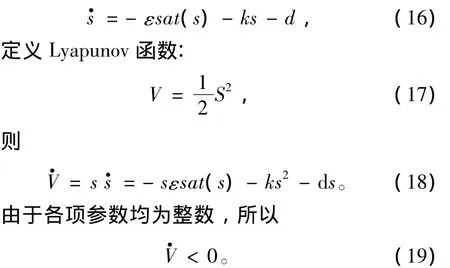
从而证明了所设计的控制器在李亚诺普夫意义下稳定。
2.4 模糊控制器的设计
模糊控制器的应用是为了减小滑模变结构控制的抖振。当系统在滑模面上运动时,即当切换函数s(t)为0,模糊控制器为等效控制ueq,而当系统在滑模面外运动时,即当切换函数s(t)不为0时,为保证系统在有效时间内到达滑模面,模糊控制器为加入了切换控制的传统滑模变结构控制器ueq+usw。所采用的模糊控制规则如下[6]:


通过调节隶属度函数μNZ(s)来实现消除抖振。本文所设计的模糊输入输出隶属度函数如图3所示。

图3 模糊输入输出隶属度函数Fig.3 Distribution of input and outputmembership functions
为保证系统在模糊滑模控制器的作用下,能够在任何初始状态下运动到滑模面,加入切换控制usw可以克服干扰项的影响,提高系统对不确定扰动的鲁棒性,在此阶段,系统的动态性能取决于切换函数参数,与干扰以及系统参数无关;当系统运动到滑模面后,模糊控制器使得切换控制作用消失,系统由等效控制作用到达平衡运行点。
3 系统仿真
3.1 系统建模
本文利用Matlab/Simulink仿真软件对系统进行仿真。单相复合控制系统仿真模型搭建如图4所示。动态电压恢复器系统参数设置分别为:电网电压幅值为×220 V,基波频率为50 Hz,滤波电感为1 mH,滤波电容为200μF,滤波电阻为0.01Ω,蓄电池电压为400 V,PWM发生器的载波频率为4 kHz。
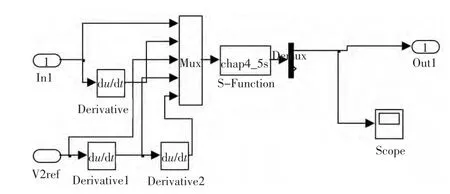
图4 模糊滑模控制系统仿真模型Fig.4 Fuzzy slidingmode variable structure control simulationmodel
3.2 仿真结果分析与比较
整个仿真过程中电压从0.1 s开始出现电压暂降,0.2 s恢复正常。分别对电压暂降20%,30%,40%以及三相不平衡负载4种情况进行仿真。本文中以电压暂降30%,负载为阻感性为例。
图5和图6分别为使用传统等效滑模控制的位置跟踪误差与模糊滑模控制的位置跟踪误差。
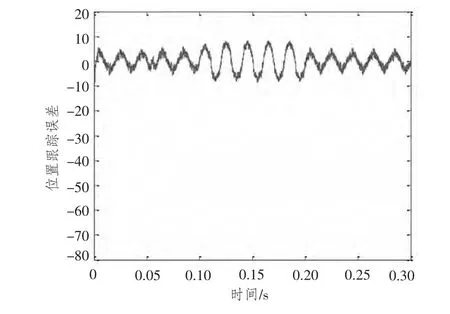
图5 传统等效滑模控制的位置跟踪误差Fig.5 The position tracking error of traditional sliding model control

图6 模糊滑模控制的位置跟踪误差Fig.6 The position tracking error of fuzzy slidingmode variable structure control
图7和图8分别为使用传统等效滑模控制的控制输入信号与模糊滑模控制的控制输入信号。
由图5~图8可见,采用基于等效控制的模糊滑模控制可以有效地消除抖振,跟踪效果较为理想。
分别采用纯PI控制、模糊PI控制以及模糊滑模控制对电压暂降进行补偿,仿真波形图如图9所示。

图7 传统等效滑模控制的控制输入信号Fig.7 The input control signal of traditional slidingmodel control
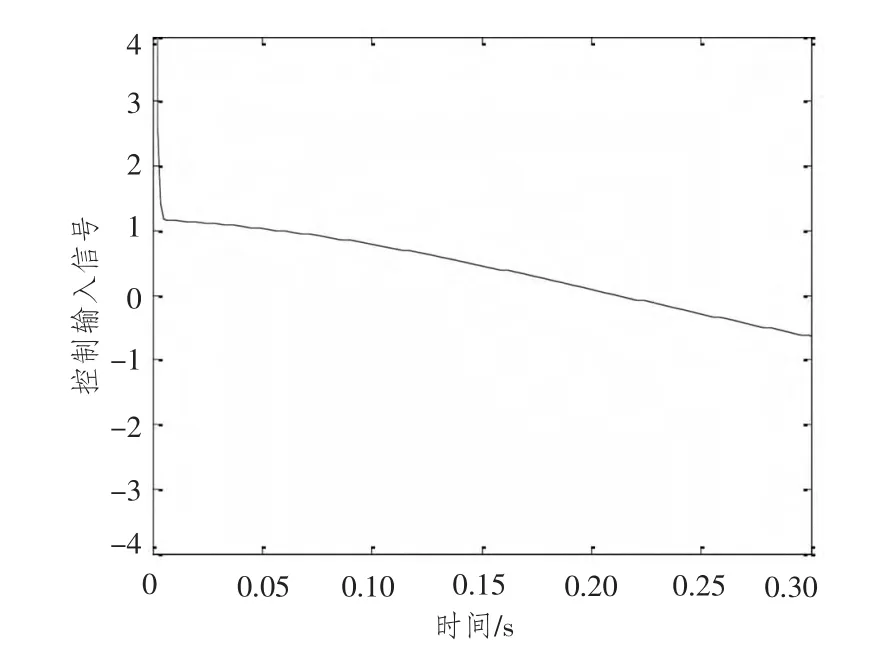
图8 模糊滑模控制的控制输入信号Fig.8 The input control signal of fuzzy slidingmode variable structure control
由仿真图可知,采用PI控制,调节时间为30 ms,超调量为3.6%,调节速度较慢且稳态误差较大,负载电压含有谐波成分,负载适应性较差。采用模糊PI控制,调节时间为12 ms,超调量为7.2%,调节速度较快,稳态误差较小。采用模糊滑模控制调节时间为2 ms,超调量为1.9%,调节速度最快,稳态误差较模糊PI控制高,但在可接受范围,并且负载适应性良好。
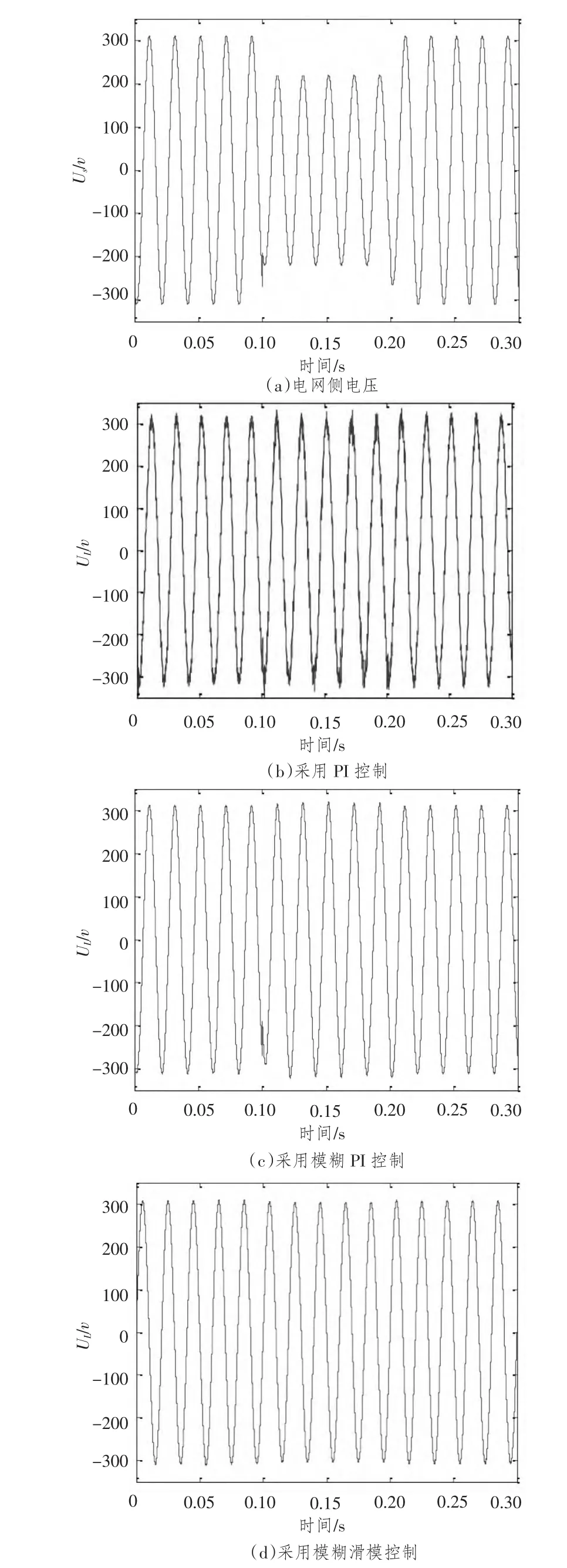
图9 三种控制方法所得到的仿真波形图Fig.9 The simulation waveform of three different control
3 结语
本文分析了电压前馈加双闭环反馈控制中,反馈环常用PI控制负载适应性差,抗干扰能力较差;而采用模糊控制PI控制稳态误差较大,负载适应性也有待提高;单纯采用传统的滑模变结构控制器,又会产生较大的抖振,工程上不可接受。针对这些问题提出了一种DVR的模糊滑模变的控制策略,其动态性能显著提高,并且很好地消除了抖振现象,并且负载适应性以及抗干扰能力较好。通过仿真实验证实了本方法的有效性以及可实现性。
[1]王智勇,吴正国,周卫平.基于无差拍控制的线电压检测动态电压恢复器[J].电网技术,2009,33(19):106-112.
WANG Zhi-yong,WU Zheng-guo,ZHOU Wei-ping.A deadbeat control based dynamic voltage restorer with line voltage detection[J].Power System Technology,2009,33(19):106-122.
[2]黄本润,夏立,周卫平,等.线电压补偿型动态电压恢复器的双前馈加反馈控制策略[J].电力自动化设备,2011,31(10):61 -64.
HUANG Ben-run,XIA Li,ZHOU Wei-ping,et al.Double feedforward plus feedback control strategy based on line voltage compensation for dynamic voltage restorer[J].Electric Power Automation Equipment,2011,31(10):61-64.
[3]王晶,徐爱亲,翁国庆,等.动态电压恢复器控制策略研究综述[J].电力系统保护与控制,2010,38(1):145-151.
WANG Jing,XU Ai-qin,WENG Guo-qing,et al.A survey on control strategy of DVR[J].Power System Protection and Control,2010,38(1):145 -151.
[4]LEDWICHG G A.Compensation of distribution system voltage using DVR[J].IEEE Trans on Power Dlivery,2002,17(4):1030 -1036.
[5]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
GAOWei-bing.The theory and design methods of sliding model control[M].Beijing:Science Press,1996.
[6]姜齐荣,赵东元,陈建业.有源电力滤波器[M].北京:科学出版社,2005.
JIANG Qi-rong,ZHAO Dong-yuan,CHEN Jian-ye.Active power filter[M].Beijing:Science Press,2005.
A novel control strategy of dynam ic voltage restorer based on fuzzy sliding mode variable structure control
SHIWei,ZHOUWei-ping,WU Zheng-guo
(College of Electrical Engineering,Naval University of Engineering,Wuhan 430033,China)
Dynamic voltage restorer(DVR)is a practicable and economicalway to ensure the energy quality of power system.Under the study of the control strategy that combine grid voltage feed-forward control with the load voltage and capacitor current double closed-loop feedback control,the traditional proportion integration(PI)controller and fuzzy controller in feedback control is analyzed,a novel control strategy based on fuzzy sliding mode variable structure control is proposed.The theoretical analysis and the simulation results show that the proposed control strategy has excellent dynamic and static performance,eliminates the buffeting problem in traditional slidingmodel control.
dynamic voltage restorer;fuzzy control;slidingmodel control;voltage sag
TP18
A
1672-7649(2014)04-0082-05
10.3404/j.issn.1672-7649.2014.04.016
2013-03-12;
2013-05-06
国家自然科学基金资助项目(51207164)
师维(1988-),男,硕士研究生,研究方向为电能智能化控制。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
消费导刊(2018年10期)2018-08-20
北京航空航天大学学报(2017年4期)2017-11-23
山东工业技术(2016年15期)2016-12-01
