船舶碰撞下半潜式海洋平台耦合动力响应分析方法研究
2014-03-07 08:28:22嵇春艳智广信侯家怡
江苏科技大学学报(自然科学版) 2014年6期
嵇春艳,智广信,侯家怡
(江苏科技大学船舶与海洋工程学院,江苏镇江212003)
在深海油气勘探和开采中,半潜式平台以相对投资较小,甲板空间和甲板可变荷载较大,生产能力较强和工作水深范围较大等优点,成为很多石油公司的首要选择.半潜式平台在海上复杂的海洋环境下开展钻井或采油作业时,除了承受环境载荷的作用外,过往的船只、补给船、守卫船等船舶由于航行过失或停靠平台时风、浪、流等环境载荷的作用,与平台碰撞的事故也时有发生,并造成结构损坏、环境污染、重大经济损失等后果[1].目前国内外对于半潜式平台碰撞问题的研究重点主要集中在碰撞过程的结构抗力和动力响应、结构损伤机理和强度评估方法上,并没有深入开展外部动力学方面的研究.Amante考虑几何非线性与材料非线性,研究了受供应船撞击后的半潜式平台圆筒的抗弯强度[2].程正顺,胡志强,杨建民研究了考虑撞击船和平台的惯性对半潜式平台结构抗撞性能的影响.胡志强模拟了供应船船侧沿横向、纵向、斜向撞半潜式平台立柱时的三种工况,研究立柱结构的抗撞特性,并评估了撞击对平台整体强度的影响[3].上述研究成果主要是考虑风、浪、流联合作用下海洋结构物的耐撞性能和运动响应,并未考虑碰撞情况对平台水动力的影响,而半潜式海洋平台的动力响应幅值和特性直接影响其作业效率和安全性,因此有必要对碰撞力作用下半潜式海洋平台耦合动力响应分析方法进行深入的研究.
文中以一供给船船尾正碰半潜式平台立柱为例进行外部动力学研究,采用非线性有限元方法建立平台的三维有限元模型、船尾的集中质量模型,通过DYNA进行碰撞力计算,在此基础上,将碰撞力以外载荷的形式导入到水动力软件AQWA中,将半潜式平台在碰撞力和风、浪、流联合作用下进行时域耦合数值计算,给出碰撞力影响下平台的动力响应.
1 理论方法介绍
1.1 碰撞机理
以文中分析的碰撞问题为例,将平台的运动微分方程:

改写成:

加速度an可通过对质量矩阵M求逆并乘以剩余力矢量求出:

式中:Fext为外部碰撞力载荷矢量;Fint为内力载荷矢量,且Fint=CVn+Kdn;Frnes为剩余力矢量,且Fres=Fext-Fint;M为平台质量矩阵;V为速度;dnnn为位移;C为阻尼矩阵;K为静水力刚度矩阵.
如果M为一对角阵,线性方程组将成为一系列关于各个自由度的独立的一元一次方程,从而可求出加速度为:

大多数非线性动力学问题一般多是采用显式有限元求解方法,特别是在求解大型结构的瞬时高度非线性问题时,显示有限元求解方法有明显的优越性.应用显式中心差分法求解碰撞问题时,一个特别值得注意的问题就是时间步长的选取,因为中心差分法是条件稳定的,其时间步长不能超过临界时间步长[4].实用中常以有限单元网格的特征长度除以应力波速c来近似临界时间步长.通过给定的碰撞速度每一时间步都计算得到离散节点的加速度,积分得到每一节点的速度、位移,进而得到每一有限单元的应变率、应力,即得到单元节点应力.最终的碰撞力为:

式中:C为阻尼项,显式积分不需要进行矩阵分解或求逆,无须求解联立方程组,也不存在收敛性问题,计算速度快,其稳定性准则能自动控制计算时间步长的大小,保证时间积分的精度.
1.2 碰撞力作用下的外部动力学原理
半潜式平台在波浪、碰撞力等耦合作用下的运动方程可以写成:

式中:M为质量矩阵;m为平台质量;A为附加质量矩阵;C为势流阻尼矩阵;D1为线性阻尼矩阵;D2为二阶阻尼矩阵;f为矢量函数,每个单元由fi=xi|xi|给出;K为静水力刚度矩阵,是位移的函数;x为位移矢量;q为激励力矢量.
激励力矢量q可以表示为:

式中:qWI为风拖曳力为一阶波浪激励力为二阶波浪激励力;qCU为流作用力;qext为波浪漫漂阻尼力、碰撞力、系泊系统提供的定位回复力等其他外力.
时域分析充分考虑前一时刻对后一时刻的影响,并且能够考虑全过程的时间历程.
延时函数的方法在时域下求解上述运动微分方程.首先可将其改写成如下形式:

其中:

根据式(6)给出的条件,方程可写为:

运用傅立叶逆变换,可得:

从实际意义出发,当t<0时,试验尚未开始,因此h(t-τ)=0;而当τ>t时,亦有h(t-τ)=0.且将式(8,9)中的f(t)及f′(t)代入式(11)中,得到:

其中的延时函数h(τ)由附加质量和阻尼变换计算获得:

相应地有:

以上二式的变换为傅立叶变换.

由于有c(ω)=c(-ω)及a(ω)=a(-ω)的关系,则易知,τ<0时,h(τ)=0;且对后续不会有任何记忆作用.也就是说,在τ<0时,上式积分中的两部分必然相反,而当τ>0时,该两部分相同,数学上可以表示为:
即可以由延时函数推出附加质量和辐射阻尼:
因此,用上述延时函数的方法结合各个水动力参数在时域下求解,最后代入公式(6),可得任意时刻海洋平台六自由度的运动响应.
2 碰撞算例
2.1 平台与船尾模型及碰撞环境
目标平台为我国南海深海油气开发采用的深水半潜式钻井平台,平台主体结构可分为浮体、立柱、甲板和上建4部分.坐标原点取在平台两对称面交线的水线处,OX轴正方向指向平台艏部,OY轴的正方向指向平台左舷,OZ的正方向指向平台上部.目标海洋平台和碰撞船的主要尺寸见表1.半潜式海洋平台和船尾的几何模型如图1.

表1 平台和碰撞船主尺度Table 1 Units of the platform and collided ship m

图1 平台和碰撞船尾示意图Fig.1 Schematic of the platform and collided ship′s stern
对于典型的海洋平台碰撞而言,在碰撞过程中受到的损伤程度会受到周围环境、撞击速度比、撞击位置、船舶吨位、撞击船的尺度、附连水质量、撞击速度、撞击方向等多种因素影响.实际碰撞中撞击参数存在多种组合,具有不确定性,综合考察较为困难[5].因此,主要考察单个碰撞参数的影响,选择的撞击参数为:碰撞船舶排水量为5000 t,平台碰撞的型式为尾碰,船尾与平台立柱正向碰撞,船舶碰撞速度为2m/s,并采用Cowper-Symonds模型和附加水质量方法[6]研究船尾与海洋平台的碰撞问题,参数设置为:硬化模量Etan为1.18×109N/m2;失效应变εf为0.15;应变率参数C为40.4.
2.2 水动力模型的建立
平台湿表面模型如图2所示.平台工作水深设计为200 m,计算平台采用张紧式系泊方式,每根缆设计成由钢链,聚酯绳和钢链3部分组成.缆索两端采用钢链能够方便施工和防止海底摩擦破坏.各部分的具体参数如表2所示.

图2 平台湿表面模型示意图Fig.2 Schematic model of the platform wet sufrace
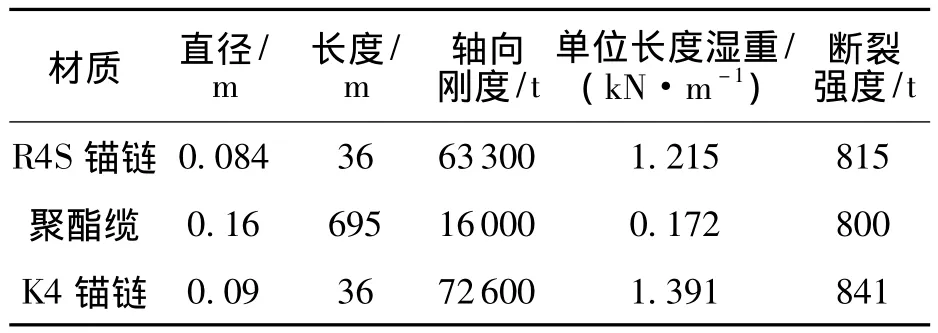
表2 系泊缆索参数Table 2 Parameters of the mooring cable
海洋平台在时域分析过程中的环境条件取为不规则波.文中采用JONSWAP谱模拟波浪,谱峰周期7.1s,有义波高1.10m,谱峰升高因子为4.0,风、浪、流的方向分别都取0和90°.计算平台设计中,缆索数目选择为12根,缆索对称布置,缆绳夹角分别为37°、40°和45°,在 AQWA 中建立的平台及系泊系统模型如图2,3所示.

图3 系泊系统局部Fig.3 Local map of the mooring system
2.3 仿真分析及外力导入
文中的主要技术路线如图4.
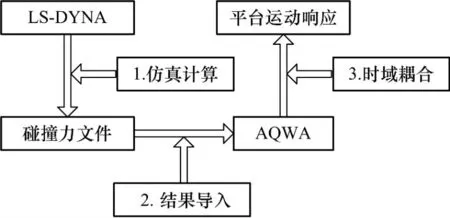
图4 流程图技术路线Fig.4 Flow chart of the technolgy roadmap
3 平台的时域水动力性能结果分析
基于非线性LS-DYNA软件对此碰撞模型进行数值仿真计算,船尾与海洋平台的碰撞力F时程t曲线(忽略导缆器等附件的影响)如图5所示.
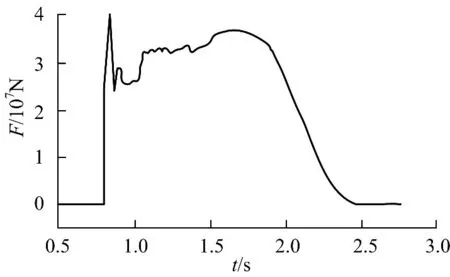
图5 船尾与海洋平台碰撞力时程曲线Fig.5 Collision forces curve of the offshore platform with the ship′s stern
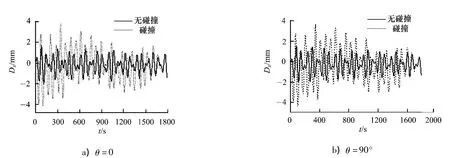
图6 平台纵荡运动响应Fig.6 Surge response of the platform
从总体上看,碰撞力曲线具有非常强的非线性,在碰撞的不同阶段,海洋平台结构出现不同程度的卸载,每一次卸载都代表一个构件的失效和破坏.船尾与海洋平台在碰撞过程中,平台整体运动有一定的滞后性,当碰撞过程持续一段时间后,在碰撞的初始阶段(0.8~0.9 s),碰撞力急剧上升,最大碰撞力为4.27E+7N,随着碰撞的继续,立柱构件开始发生失效,图中波峰的出现是因为立柱构件的失效和破坏后,该单元被删除掉了,随着平台立柱的破坏及碰撞船速度逐渐减小,碰撞力就会随之减小.在2 s之后碰撞力随着时间的推移显著减小,这是因为此后海洋平台开始出现了旋转运动.
本次仿真计算是在真实碰撞力作用下对半潜平台及其系泊系统进行了时域完全耦合动态分析,平台初始位置在动平衡位置[7].在AQWA中非线性耦合问题是通过在deck中定义相关系数(风力系数、流力系数等)来实现的;由于受碰撞力文件格式的限制,模拟计算时间取为0.5 h.一般来说,对于半潜式平台,当风、浪、流同方向时将对系泊系统上产生最大的临界张力.因此本文假定风、浪、流在同一方向上,即被撞海洋平台在风、浪、流方向角θ分别都取0和90°情况下的时域水动力计算的响应曲线(图6~11).
从图6~11可以看出,对两种风浪流方向,没有碰撞力时只有横荡Dy、横摇θx和艏摇θz有着较大的变化,其余方向的运动变化很小.有无碰撞力对平台的运动响应有着明显的影响.其中影响最小的就是平台的垂荡Dz运动,在碰撞力作用附近垂荡运动幅值增加7.69%左右.在纵荡Dx方面,碰撞力大概使平台运动增大一倍.在横荡方面,碰撞力大概使平台运动增大十倍.在横摇方面,碰撞力大概使平台运动增大十倍.在纵摇θy方面,碰撞力大概使平台运动增大0.5倍.在艏摇方面,碰撞力大概使平台运动增大10倍.
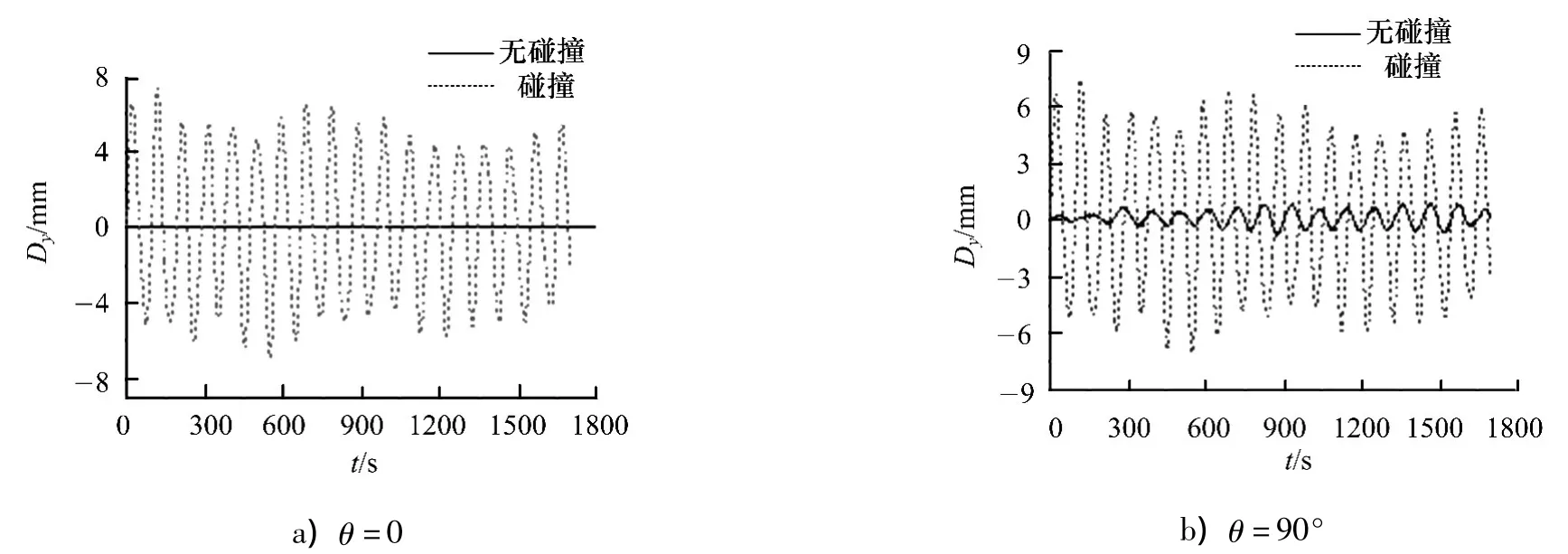
图7 平台横荡运动响应Fig.7 Sway response of the platform

图8 平台垂荡运动响应Fig.8 Heave response of the platform
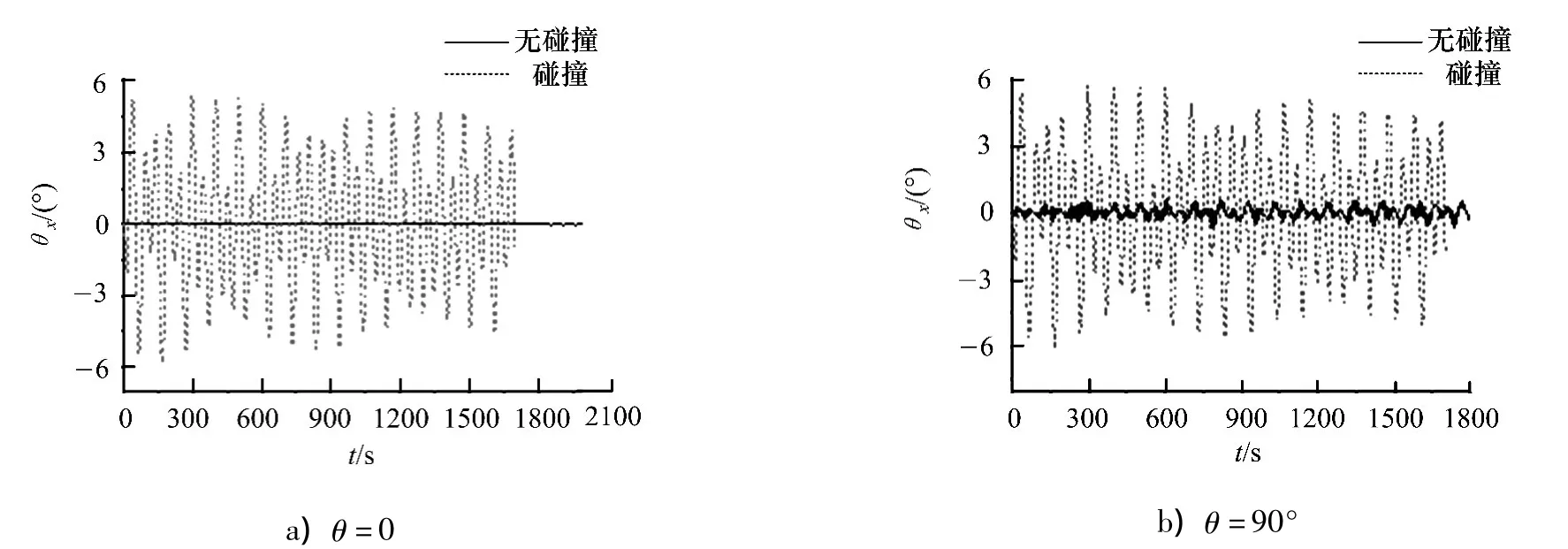
图9 平台横摇运动响应Fig.9 Rool response of the platform
图10 平台纵摇运动响应Fig.10 Pitch response of the platform

图11 平台艏摇运动响应Fig.11 Yaw response of the platform
风浪流方向均为0的情况下,水平运动方面,纵荡运动最大偏移量Dx为4 m,横荡运动很小,垂荡Dz运动最大在0.75 m左右.摇荡方面,最大的是纵摇θy在2°左右,横摇和艏摇运动很小.在碰撞力作用下,除了垂荡,其余响应都有明显的变化,其中横荡、横摇和艏摇的变化最大.
风浪流方向均为90°的情况下,水平运动方面,纵荡运动最大偏移量为4 m,横荡运动最大偏移量为1 m,垂荡运动最大在0.75 m左右.摇荡方面,最大的是纵摇在2°左右,横摇运动最大的是纵摇在0.5°左右,艏摇运动很小.在碰撞力作用下,除了垂荡,其余响应都有着明显的变化,其中横荡、横摇和艏摇的变化最大.
由于碰撞位置发生在平台左舷后侧的立柱,有碰撞力作用的情况下,横荡、横摇和艏摇的变化非常大,符合现实情况,说明碰撞力对这3个方向的运动响应影响很大,具体跟碰撞力大小、方向和变化有着密切的关系.
4 结论
1)将不做任何简化的真实碰撞力以外力文件的形式导入到水动力软件中.将碰撞和水动力计算结合在一起,实现了真实海况(包括风、浪、流、碰撞力)的时域耦合水动力数值模拟.
2)被撞海洋平台的整体运动具有明显的滞后性,在碰撞的初始阶段,碰撞力急剧上升,达到最大碰撞力,随着碰撞的继续,立柱构件发生失效,随着平台立柱的破坏及碰撞船速度逐渐减小,碰撞力随之减小.
3)受碰撞力作用,平台的横荡、横摇和艏摇变化幅度非常大,碰撞力的大小、方向和变化趋势对平台的运动响应有着直接和重要的影响,进而影响其作业效率和安全性.
References)
[1] 李永芹.海域油气资源:中国未来的能源接力军[J].中国石油和化工经济分析,2007,2(11):55-60.
[2] Amaral Amante D D,Trovoado L,Estefen S F.Residual strength assessment of semi-submersible platform column due to supply vessel collision[C]∥Proceedings of the27th International Conference on Offshore Mechanics and Arctic Engineering.[S.l.]OMAE,2008:779 -789.
[3] 胡志强,崔维成.船舶碰撞机理与耐撞性结构设计研究综述[J].船舶力学,2005,9(2):131-142.Hu Zhiqiang,Cui Weicheng.Review of the researches on the ship collision mechanisms and the structural designs against collision [J].Journal of Ship Mechanics,2005,9(2):131 -142.(in Chinese)
[4] 王自力,蒋志勇,顾永宁.船舶碰撞数值仿真的附加质量模型[J].爆炸冲击,2002(4):21-326.Wang Zili,Jiang Zhiyong,Gu Yongning.An added water mass model for numerical simulation of ship/ship collisions[J].Explosion And Shock Waves,2002(4):21 -326.(in Chinese)
[5] 戴遗山,段文洋.船舶在波浪中运动的势流理论[M].北京:国防工业大学,2008.
[6] 李润培,陈伟刚,顾永宁.船舶与海洋平台碰撞的动力响应分析[J].上海交通大学学报,1996,31(3):40-47.Li Runpei,Chen Weigang,Gu Yongning.Dynamic analysisof ship/platform collision[J].Journal of Shanghai Jiaotong University,1996,31(3):40 -47.(in Chinese)
[7] 童波,杨建民,李欣.深水半潜平台悬链线式系泊系统耦合动力分析[J].中国海洋平台,2008,23(6):1-7.Tong Bo,Yang Jianmin,Li Xin.Coupled dynamic analysis of catenary mooring system for the deep water SEMI-submerged platform [J].China Offshore Platform,2008,23(6):1 -7.(in Chinese)
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:02
山东冶金(2022年2期)2022-08-08 01:50:50
花火·慧阅读(2022年6期)2022-05-19 12:33:31
海洋石油(2021年3期)2021-11-05 07:43:10
兵器装备工程学报(2021年9期)2021-10-15 01:33:14
中国海上油气(2020年5期)2020-10-20 09:28:48
东坡赤壁诗词(2018年3期)2018-07-16 11:39:44
中国船检(2018年3期)2018-03-29 06:38:41
工业设计(2016年11期)2016-04-16 02:48:21
船海工程(2015年4期)2016-01-05 15:53:40