
可控基础激励轴系推进实验系统研究
2014-03-07 08:28:04耿瑞光张洪田
江苏科技大学学报(自然科学版) 2014年4期
耿瑞光,张洪田,2
(1.黑龙江工程学院机电工程学院,黑龙江哈尔滨150050)
(2.哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨150001)
船舶系统的振动问题本质上涉及了结构振动、流固耦合等复杂多学科动力学问题.虽然现代仿真技术已经广泛应用于船舶系统的动力学特性研究[1-2],但由于计算理论、计算方法及仿真模型简化等方面的限制[3-4],实验研究仍然是船舶振动系统研究中不可或缺的重要手段[5].
对船舶推进系统的实验研究,可进行台架试验和现场实验.现场实验受限于物理原型的完备程度,实验耗资巨大,而台架试验运用相似原理,对真实物理原型的结构进行相对简化、尺寸缩小,从而减少试验成本,是广泛采用的实验方法.因此,一种能反映环境激励特征的实验装置[6]是船舶推进系统动力学特性实验研究的关键.
1 实验系统设计原型分析
静水中的船体由于沿船长的重力和浮力不均衡,致使船体出现弯曲变形,同时波浪也会改变船体长度上浮力的分布情况,使得重力和浮力更趋不均匀,从而加剧船体的总纵弯曲.对于波长远小于船长的波浪,在船长范围内将会有多个波峰和波谷出现,浮力分布不会产生明显的变化;当波长远大于船长,船舶只位于部分波浪长度上,浮力也无明显变化;而当波长等于船长时,船体受弯矩作用将可能出现极限情况下的中垂、中拱现象,中垂时波峰位于船的两端,而中拱时波谷在船的两端[7].船体总纵弯曲的极限情况如图1.
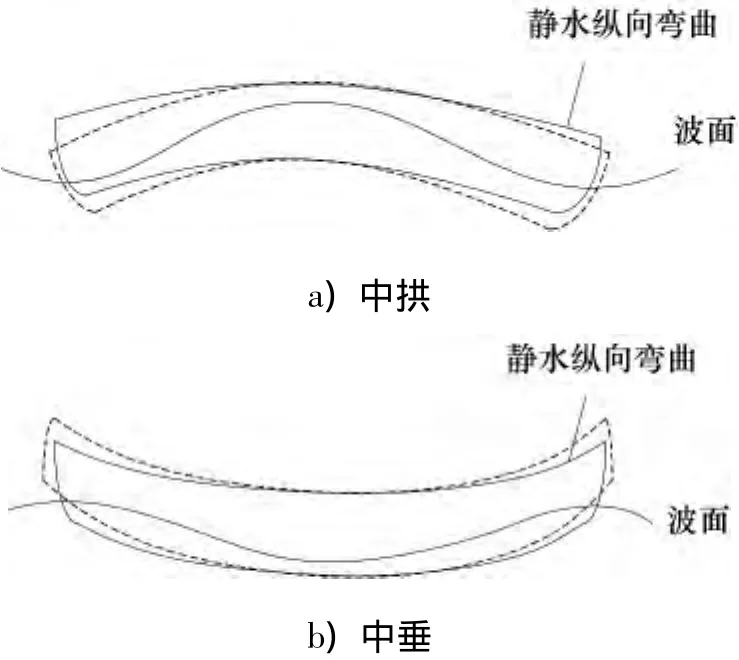
图1 船体纵向弯曲变形的极限情况Fig.1 Longitudinal bend deformation of ship hull
推进轴系会因船体变形及环境激励而受到不同的载荷和扰动.船体变形会对轴系支承力产生影响,而环境激励作用于轴系部件上的载荷也会使轴系产生动力学响应.
为使实验系统能够满足推进轴系在船体极限情况下的实验设计,并使实验系统具有较大的结构灵活性,采用桨扇联动的垫升船舶为实验装置的设计原型.垫升船舶是支承在弹性气垫上的典型的柔性船体-轴系推进结构,一般由空气螺旋桨、风机、减速箱、多轴段构成.
2 实验系统设计
针对船舶振动系统,浮力及海浪的影响会使船舶形成一个海浪-船体-推进系统的弹性振动系统.其中,浮力对船体的作用相当于作用于船体上的弹性支承,而海浪则为对柔性船体的变形影响,以及通过对船体刚性运动形成的对推进轴系的扰动.
因此,针对船舶振动系统有效的实验装置应该包括可控激励、弹性支承、柔性基础以及相应的推进轴系.柔性基础采用框架结构的浮箱设计,可使基础在支承推进系统的前提下,具有一定的柔度.轴系推进系统由变频电机驱动,以模拟不同转速工况下推进系统的运行特性.
为利用实验系统对船舶推进系统进行进一步的动力学研究,还需要相应的参数检测、采集和分析系统.实验系统总体布置如图2.
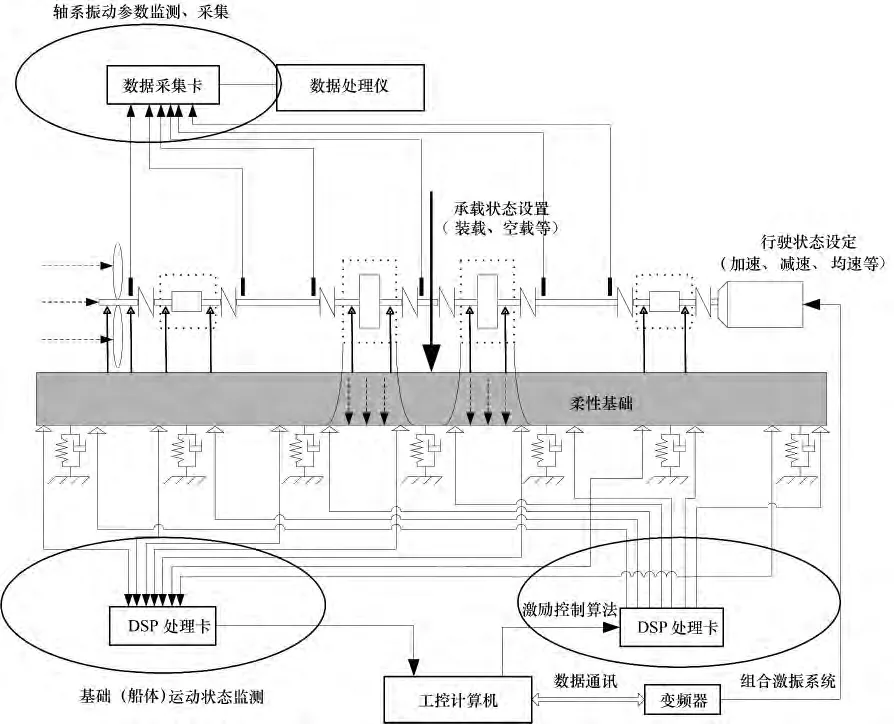
图2 实验系统总体布置Fig.2 General arrangement of experiment system
2.1 弹性支承的设计
选择空气弹簧作为实验台架的弹性支承.采用空气弹簧的气浮装置常见于汽车空气悬架、铁路机车或船舶的被动隔振系统[8-9].
空气弹簧是利用橡胶材料制成的封闭气室中的压缩空气作为弹性介质的非金属弹簧.在弹簧的有效行程内,振动载荷量增加,弹簧的高度降低,内腔容积减小,弹簧的刚度增加,内腔空气柱的有效承载面积加大,弹簧的承载能力增加.振动载荷量减小时,弹簧的高度升高,内腔容积增大,弹簧的刚度减小,内腔空气柱的有效承载面积减小,此时弹簧的承载能力减小.因此,空气弹簧的高度、内腔容积、承载能力可随着振动载荷的递增与减小发生平稳的柔性传递.
如果在弹簧和附加空气室之间加设节流孔,利用空气的阻尼作用,则可在弹簧上载荷发生振动时,起到衰减振动的作用.
对于微幅振动的空气弹簧,其垂向刚度K可表示为

式中:p0为囊内压力;pa为大气压;S为空气弹簧有效承压面积;x为垂向变形;V为空气弹簧的容积.

则式(1)可表示为

式中:α为形状系数,由空气弹簧结构决定.
2.2 空气弹簧位移控制
为达到船体静态及动态变形情况的实验状态,采用空气弹簧变形高度进行位移控制[10-11].空气弹簧工艺流程及控制流程包括空压机、减压阀、电磁阀、空气弹簧、辅助气缸、位移及压力传感器、控制电路和工控计算机.弹簧变形高度由工控机通过上位机软件控制电磁阀开闭实现.空气弹簧位移控制流程如图3.
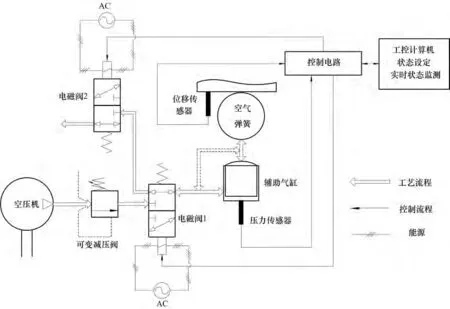
图3 空气弹簧位移控制流程Fig.3 Control flow of air spring′s displacement
2.3 控制电路设计
控制电路是空气弹簧位移控制流程中的核心系统.控制电路包括数据采集卡、信号控制卡、位移信号采集电路、压力信号采集电路、信号滤波电路、控制信号电路和电源等.
使用单端方式实现单个通道信号输入,同时多个信号的参考地公用一个接地点.此种方式可应用在干扰不大,通道数相对较多的场合.控制电路中模拟电压单端输入方式如图4,32路模拟输入信号连接到AI0~AI31端,其公共地接到AGND端.

图4 AD单端输入连接方式Fig.4 Input join mode of AD endpoint
信号控制卡采用PCI2307.
图5为位移信号采集电路.其中WS是位移传感器,V1是12V电源,R1是精度为千分之一的精密电阻,R2,C1,C2,L1,C3 和 C4 组成滤波电路.位移传感器工作范围0~20 mm,通过12 V电源供电,在R1两端输出0~5 V的模拟电压信号,AI0和AGND端分别与PCI8622数据采集卡AI0和AGND两端相连,位移信号通过数据采集卡内部计算以0~20 mm范围显示在监控界面上.
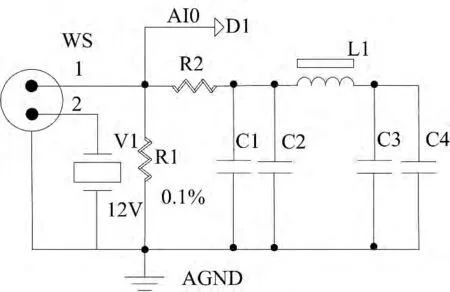
图5 位移信号采集电路Fig.5 Colletion circuit of displacement singals
监控系统控制电磁阀的开关会造成一定的电磁干扰,信号采集时会引入这一部分误差,影响控制精度.因此,需要对相应的信号进行滤波处理.
控制电路通过控制电磁阀的闭合来实现试验台的起伏.电磁阀采用单线控制法,即控制火线的连接和断开来控制电磁阀的开关,电磁阀控制电路接线如图6.其中,S是电磁阀,J是PCI2307上继电器,监控软件根据目标位移与实际位移或者目标压力与实际压力的差值给出控制信号,通过KO0和COM0输出到J中,以控制1和2的断连.
2.4 控制策略
控制策略使用VB编程实现,控制策略通过系统监控界面实现具体控制方案,控制策略如图7.
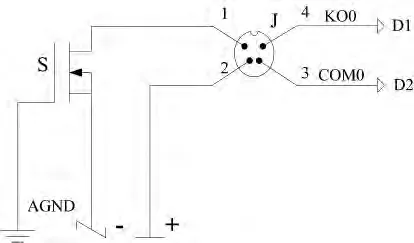
图6 电磁阀控制电路接线图Fig.6 Conneciton of electromagnetism valve′s control circuit

图7 控制策略Fig.7 Control strategy
3 实验系统测试
3.1 基础变形测试
对实验系统进行基础中拱变形测试.按照中拱10,20,30mm状态,从控制界面输入已知基础中拱变形的变形数据,控制后的实验系统基础不同位置的变形位移实测值如图8.由图8可以看出,文中所建立的实验系统具有良好的控制效果.

图8 中拱轴系变形图Fig.8 Deforming of shafting hogging
3.2 轴系振动测试
利用实验系统的参数监测、采集和分析系统,进行轴系振动测试.采用加速度传感器进行轴系振动数据采集,加速度传感器分布于轴系各支承处,水平和垂直放置.加速度信号通过多路数据采集卡将振动信号经过D/A转换后输入工控PC,直接通过数据处理仪器进行数据分析.
基础中拱20mm时,轴段水平振动位移如图9.

图9 基础中拱时不同转速下中间轴水平位移值Fig.9 Horizontal displacements of middle shaft when base was middle haunch-up and rotational speed was different
如需要研究滑动轴承在推进系统中的动力学特性,以及滑动轴承对轴系振动的影响,可将实验系统中推进轴系的支承更换为滑动轴承,通过压力传感器测量正交的动态油膜力和轴系振动,即可开展相应实验研究.
4 结论
以垫升船舶为设计原型的轴系推进实验装置,具有较好的结构灵活性.实验装置可采用空气弹簧作为推进系统基础的弹性支承,通过电路设计和相应的控制策略,可对弹性支承进行位移控制,实现装置柔性基础的变形和运动,从而模拟波浪对船体的激励作用.系统测试证明,该实验系统激励控制效果良好,基础变形状态符合波浪对船舶结构的载荷影响.
References)
[1] 陈宁,吴尚华.船舶拉锚试验仿真系统研究[J].江苏科技大学学报:自然科学版,2013,27(5):425 -429.Chen Ning,Wu Shanghua.Ship pull anchor test simulation system[J].Journal of Jiangsu University of Science and Technology:Natural Science Edition,2013,27(5):425-429.(in Chinese)
[2] 李文华;杜佳璐;孙玉清,等.动力定位船舶的波浪扰动建模与仿真[J].大连海事大学学报,2013,39(1):6-10.Li Wenhua,Du Jialu,Sun Yuqing,et al.Modeling and simulation of wave disturbance for dynamic positioning ship[J].Journal of Dalian Maritime University,2013,39(1):6-10.(in Chinese)
[3] 金咸定,赵德有.船体振动学[M].上海:上海交通大学出版社,2000.
[4] 邹春平,陈端石,华宏星.船舶结构振动特性研究[J].船舶力学,2003,7(2):102 -115.
[5] Wu Y S,Chen R Z,Lin J R.Experimental technique of hydroelastic ship model[C]∥Proc 3rd Int Conf on Hydroelasticity in Marine Technology.2003.
[6] 张志宏,缪涛,顾建农.规则波中航行船舶引起的表面波形及水底压力[J].华中科技大学学报:自然科学版,2013,41(11):91 -96.Zhang Zhihong,Miao Tao,Gu Jiannong.Surface wave patterns and water bottom pressures variation by moving ship in regular wave[J].Journal of Huazhong University of Science & Techology:Natural Science Edition,2013,41(11):91-96.(in Chinese)
[7] 李殿璞.船舶运动与建模[M].哈尔滨:哈尔滨工程大学出版社,2008:205-220.
[8] 黄定师,江洪,琚龙玉,等.带附加气室空气悬架的综合性能优化[J].机械设计与制造,2013(13):217-220.Huang Dingshi,Jiang Hong,Ju Longyu,et al.Integrate performance optimization of air suspension with auxiliary chamber[J].Machinery Design & Manufacture,2013(13):217-220.(in Chinese)
[9] 姜圣,卿启湘,龙铝波.基于多体力学的汽车空气弹簧悬架优化[J].工程设计学报,2009,16(3):182-186.Jiang Sheng,Qing Qixiang,Long Lvbo.Optimization of air suspension parameters based on multi-body dynamic[J].Journal of Engineering Design,2009,16(3):182-186.(in Chinese)
[10] 毛为民,江惠明,朱石坚,等.空气弹簧隔振平台姿态模糊控制研究[J].海军工程大学学报,2006,18(3):60-65.Mao Weiming,Jiang Huiming,Zhu Shijian,et al.Study of attitude fuzzy control for spring vibration isolation platform[J].Journal of Naval University of Engineering,2006,18(3):60 -65.(in Chinese)
[11] Kenji Kawashima,Tomonori Kato,Koichi Sawamoto.Realization of virtual sub chamber on active controlled pneumatic isolation table with pressure differentiator[J].Precision Engineering,2007,31:139 -145.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:52
军民两用技术与产品(2022年4期)2022-06-28 02:03:04
舰船科学技术(2022年10期)2022-06-17 06:26:50
防爆电机(2022年3期)2022-06-17 01:41:24
仪器仪表用户(2021年10期)2021-11-27 08:25:54
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
舰船科学技术(2016年1期)2016-02-27 15:39:19
船海工程(2015年4期)2016-01-05 15:53:26
焊接(2015年9期)2015-07-18 11:03:51
海军医学杂志(2015年2期)2015-02-27 13:47:42
