
具有时滞和HollingⅢ型功能反应的三种群捕食模型的全局渐近稳定性
2014-03-01 07:22官金兰房少梅
韶关学院学报 2014年4期
官金兰,房少梅
具有时滞和HollingⅢ型功能反应的三种群捕食模型的全局渐近稳定性
官金兰1,房少梅2
(1.广东农工商职业技术学院基础部,广东广州510507;2.华南农业大学理学院,广东广州510642)
研究具有时滞和HollingⅢ型功能反应的一个捕食者两个食饵的三种群捕食系统,通过构造Lyapunov函数,给出该系统全局渐近稳定的充要条件,最后用Matlab软件对所得的理论结果进行数值仿真.
时滞;HollingⅢ型功能反应;Lyapunov函数;全局渐近稳定;数值仿真
捕食者—食饵系统是生态学中描述种群动力学的一类非常重要的模型,而带有功能性反应函数的系统能更确切地描述实际的生态捕食情况,这方面已有一些很好的研究工作[1-5].如文献[1]研究了HollingⅡ型功能反应函数对一个捕食者两个食饵的捕食系统的影响.由于HollingⅡ型功能反应函数是线性的,它只能描述类似藻类细胞动物和无脊椎动物这样的简单捕食系统,还要对系统的很多因素进行忽略,才能用线性函数来进行描述.为了能准确的描述实际生态捕食系统,文献[4]引入HollingⅢ型功能反应函数:ø(x)=ax2/ (a2+b2),这是一个二次函数,它比HollingⅡ型功能反应函数能更好地描述实际的生态捕食系统,描述的捕食系统范围也比较大,包括了脊椎动物在内的捕食系统.
在一个捕食者两个食饵的捕食系统中,由于两个食饵躲避捕食者的捕捉能力不一样,所以每个食饵对捕食者的HollingⅢ型功能反应函数是不同的,与此同时,在生态系统中,时滞能更好地描述实际情况.
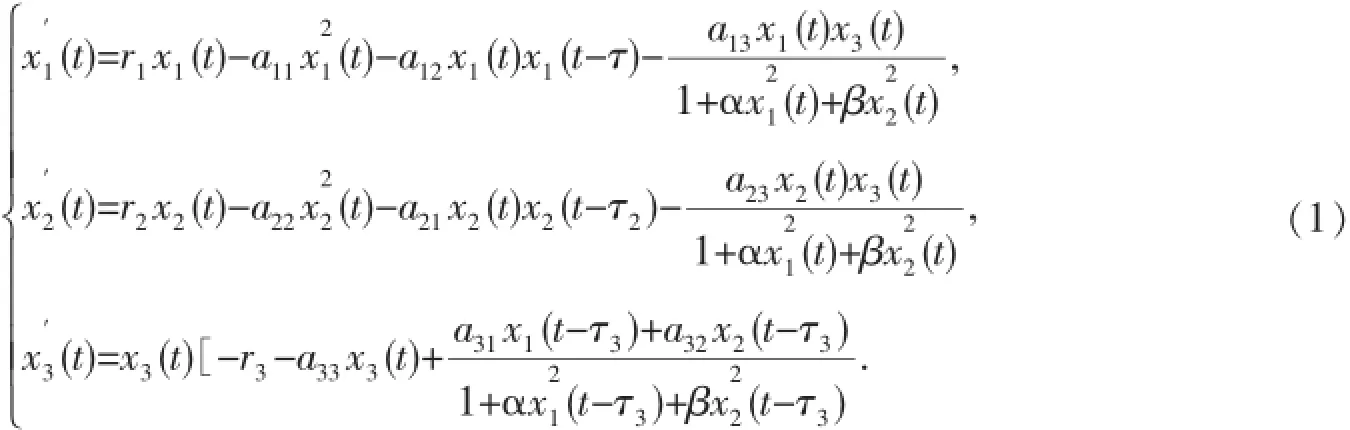
因此本文在一个捕食者两个食饵的3种群Volterra型捕食模型[1]:

的研究基础上,建立如下具有时滞和HollingⅢ型功能反应的一个捕食者两个食饵的3种群捕食模型:其中xi(t)(i=1,2)分别表示两食饵的种群密度,x3(t)表示捕食者种群的密度.τ1,τ2分别表示两食饵种群x1(t),x2(t)负反馈引起的时滞,τ3为捕食者种群从幼年到成年的成熟期,而且捕食者种群只有到了成年后才具有捕食能力.ri,aij(i,j=1,2,3),α,β都为正常数,τ=max{τ1,τ2,τ3}.xi(t)(i=1,2,3)都是定义在区间[-τ,+∞)上的连续可微函数.本文主要研究系统(1)的正平衡点的全局稳定性.通过构造Lyapunov函数,证明得到该系统全局渐近稳定的充要条件,最后用Matlab软件对所得的理论结果进行数值仿真.
1 预备知识
假设系统(1)满足下列条件:

则存在T>0,对所有τ>T有:

其中,


由于系统(1)的3个种群的密度xi(t)(i=1,2,3)相互之间具有循环的相同类型的影响,因此本文约定集合⊂R+×R+×R+,其中={x∈R3|xi≥0,i=1,2,3}.
定义1函数V(N)称为是连续时间生态模型:

(1)V(N*)=0,V(N)>0,当N≠N*时,其中N*为生态模型(2)的正平衡点;
(2)V(N)=k,对每一个正值K是一个闭的超曲面,且V(N)→∞,当N→0或VN→∞时[6].
定义2对连续生态模型(2),如果存在上述定义的正定且无限大的V函数,使得V(N(t))<0,则称生态模型(2)的正平衡点N=N*是全局稳定的[6].
2 主要结果
引理1(解的存在性)系统(1)至少存在唯一满足以下初始条件:

的解,这里φi(s)(i=1,2,3)均在区间[-τ,+∞)上连续可微.证系统(1)可以写成如下的一个初值问题:

其中


则其对应的雅可比矩阵:


引理2如果系统(1)的初值恒大于零,则系统(1)的解一定为正解.
证设x(t)=(x1(t),x2(t),x3(t))是系统(1)的任意一组解,代入系统(1),由假设(H1),(H2),(H3),m1,m2,m3,M1,M2, M3均大于零,且有:

然后在[0,t]上积分,有:

当t=0时,C1=C2=x1(0),C3=C4=x2(0),C5=C6=x3(0),所以x1(t),x2(t),x3(t)均大于零.所以引理2成立.
定理1系统(1)存在正平衡点x*=(x1*(t),x2*(t),x3*(t)),且x*全局渐近稳定的充要条件是(H1),(H2),(H3)条件成立,且满足:

证设x(t)=(x1(t),x2(t),x3(t))是系统(1)的任意一组正解,根据(H1),(H2),(H3)和引理1,存在正的常数mi(i=1,2,3),使对所有的t≥T,有:

构造Lyapunov函数[6]如下:

则V(t)沿着系统(1)的任意正解的右导数为:

令:

对(4)在[T,t]上积分,则有:(i=1,2,3)及其导数在[T,+∞]上有界,

所以系统(1)的任意正解是稳定的且是全局渐近稳定的.
3 数值仿真
利用Matlab求解微分方程(1)的数值解,设置方程的系数为:r1=2,a11=1,a12=2,a13=0.5,r2=2,a21=1,a22= 0.2,a23=0.1,r3=1,a31=0.5,a32=0.5,a33=0.2,α=0.5,β=0.5编写Matlab程序运行,可以得到如图1所示的密度分布图及相图.
从图1中可以看出,经过一定的时间后,3个种群都达到平衡,x1(t),x2(t),x3(t)分别在x1(t)=0.812 2,x2(t)= 0.083 5,x3(t)=0.465 7处达到平衡.

图1 三种群的密度分布图和相图
4 结论
生态种群之间在满足一定的条件下,它们相互依存的数量变化最终都将趋于稳定,达到现实生活中的生态平衡.但影响种群达到平衡的因素很多,既有自然的因素,如环境的容纳量和资源的数量有限等;也有人为的因素,如人类对环境的破坏会对种群的平衡产生很大的影响.所以,接下来的工作,就是要对系统(1)进行改进,把环境和人为的因素加以考虑,使之更符合实际的生态系统.
[1]程惠东,藏秀红,张伟伟.具有HollingII类型功能反应的3种群捕食时滞模型[J].数学的实践与认识,2008,38(13):130-133.
[2]王稳地.带时滞的生态模型的渐近性态[J].生物数学学报,1997,11(5):1-7.
[3]徐瑞,陈兰荪.具有时滞和基于比率的三种群捕食系统的持久性与全局渐近稳定性[J].系统科学与数学,2001,21(4):204-212.
[4]陈兰荪.数学生态学模型与研究方法[M].北京:科学出版社出版,1988.
[5]Wangersky P J,Cuningham W J.On time lage in equations of growth[J].Proc Acad Sci USA,1956,4(2):6992-7002.
[6]陈菊芳,杨霞.生态系统中Lyapunov函数的构造[J].生物数学学报,1996,11(3):12-23.
[7]钟益林,彭乐群,刘炳文.常微分方程及其Maple,MATLAB求解[J].北京:清华大学出版社,2007.
On the three population predator-prey model with time delay and HollingⅢ-type functional response
GUAN Jin-lan1,FANG Shao-mei2
(1.Department of Basic Courses,Guangdong Agricultural Industry Business College,Guangzhou 510507,Guangdong,China;2.College ofScience,South China AgriculturalUniversity,Guangzhou 510642,Guangdong,China)
This paper studies the three population Predator-prey model with time delay and HollingⅢ-type functional response.By constructing Lyapunov function,it provides the sufficient condition for global asymptotic stability,and ituses Matlab software to simulate the theory result.
HollingⅢ-type functional response;time delay;Lyapunov function;global asymptotic stability; numerical simulation
O175.2
A
1007-5348(2014)04-0005-05
(责任编辑:邵晓军)
2013-12-22
国家自然科学基金项目(11271141).
官金兰(1982-),女,广东韶关人,广东农工商职业技术学院基础部讲师,博士,主要从事生物数学模型与可视化方面的研究.
猜你喜欢
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
应用数学(2020年4期)2020-12-28
数学物理学报(2020年5期)2020-11-26
数学物理学报(2019年4期)2019-10-10
自动化学报(2019年6期)2019-07-23
数学物理学报(2019年3期)2019-07-23
数学物理学报(2018年5期)2018-11-16
太原师范学院学报(自然科学版)(2018年2期)2018-08-17
中外文摘(2016年13期)2016-08-29
