
大型养路机械车载数据采集系统的设计
2014-03-01 07:22韩竺秦
韶关学院学报 2014年4期
韩竺秦
大型养路机械车载数据采集系统的设计
韩竺秦
(韶关学院物理与机电工程学院,广东韶关512005)
为解决大型养路机械中信号采集和处理的需求,设计了多通道多模式数据采集系统,以SAM9X35为核心,以大容量DDR2为数据缓存,将采集到的数据采用CAN总线传至上位机,下位机模块可以进行在线升级.整体方案包括系统电源管理模块的方案,CAN通信接口电路以及下位机数据采集模块的设计与实现.根据系统的复杂性和多任务性,采用μC/OS-II实时操作系统,开发了数据采集和预处理程序.
教车载系统;数据采集;CAN总线;μC/OS-II
近几年随着我国铁路的几次大提速,铁路运力的负担越来越重,针对铁路的维护和检修就显得非常重要,对铁路大型养路机械的作业实时工况数据的采集带来了比较大的困难.我国大型铁路养路机械是集机械架构、电气控制、液压和气动控制于一体的设备,机械机构复杂,电气控制难度非常大,运行参数多,工作环境恶劣.这就导致了大型养路机械设备在工作中故障率增高且难于排查,我国大养机械的采集模块大部分是采购奥地利的普拉塞尔公司、美国PG和HARSCO公司已有的采集设备并进行改造,造价高,没有自主知识产权.不能够进行在线升级,且不便于维护.因此进行对车载工况数据采集模块的国产化以及在线升级需求及其迫切.
采用嵌入式数据采集系统,使大型养路机械的工况数据采集模块化、网络化[1].该系统是由下位机的车载终端数据采集系统和上位机终端控制系统组成.下位机可以实现工况数据采集,通过模块的处理之后,将采集到的数据通过CAN总线上传到上位机.上位机接收到下位机数据,对采集来的数据进行分析和处理,通过显示终端把数据显示到人机界面[1].
1 系统设计
1.1总体设计
本设计的铁路大型养路机械数据采集装置是集ARM嵌入式技术、传感技术、CAN-BUS总线和数据采集于一体铁路机械专用数据采集系统.该系统采用新型的ARM嵌入式工业控制模块SAM9G45作为系统的控制器,用CAN总线来传输数据采集模块(模拟量输入模块、模拟量输出模块、数字量输出模块、数字量输入模块)采集到的数据.实现CAN数据采集功能.
大型养路机械ARM主控板上位机模块的硬件结构见图1.图中虚线方框部分构成了主控系统通信与控制,整个主控板安装在大型养路机械车的司机室主控箱内.司机室主控箱包括用以连接GPRS模块的串行接口,以太网络接口,CAN-BUS总线接口等接口电路,还包括主电源管理系统模块,扩展的数据存储模块等.本设计的上位机模块是将上述单元模块集成到单独一块印制在电路板上,这样不仅提高了系统的稳定性、抗干扰性,而且符合采集模块可更换的要求,同时方便安装.
下位机CAN数据采集模块分别安装在机车的各个分散的电气箱内,用来采集大型养路机械机车各个部件的工作参数和状态参数.各个电气箱之间用CAN-BUS总线连接在一起.采集到的实时数据经过CANBUS总线发送到上位机,并通过上位机的显示终端显示现场的作业状况指示,操作人员通过指示信号进行现场作业.下位机的大型养路机械数据采集设备以及CAN-BUS总线通信共同构成了大型养路机械通用的终端采集系统[2,4].

图1 主控模块的硬件结构
1.2硬件设计
通用的终端数据采集系统是对整个机车工况数据的采集.其采集系统硬件电路的优良会直接对各个部位数据的采集和功能实现与控制受到很大影响.不仅要保持正常工作,终端数据采集模块的工作的稳定性以及在复杂工况下的抗干扰性也是设计过程中需要考虑到的一个重要因素[2].终端数据采集模块的处理器均采用Atmel SAM9X35.外围添加一些必要的功能电路来实现数据的采集,通过CAN总线和上位机通信,每一个车载模块都有一个模块专有的ID号,自身带有故障检测功能,采集模块一旦发生故障,施工人员可以直接在线更换通用采集模块.该通用模块的主要硬件部分如下.
1.2.1 电源管理系统
参照大型养路机械电气系统设计标准,蓄电池为机车控制电路系统的主电源,其规格参数为24 V,200 A·h.在实际使用中经测量发现,主蓄电池能产生稳定且大功率的直流电源[3],其电压值为27.5 V±5%.因此本设计直接利用车载蓄电池电源作为数据采集终端的工作电源,以达到最优化最合理的电源管理.
直接利用大型养路机械机车电气系统中蓄电池电源供电,不会对大养机械机车的电气控制系统产生影响(见图2),采用IQ18050电源模块作为整个机车控制电路的电源管理模块.

图2 系统的电源管理模块
IQ18050电源模块有非常宽的输入范围,达到9~36 V,输出电压纹波非常小,电压能稳定在5 V,该电源通过外围处理电路进行一些升压和降压可变换5 V、3.3 V、1.8 V给MCU和一些低功耗的芯片供电.采用美信及凌力尔特的电源管理方案将5 V电源转化为±10 V、±15 V、36 V、24 V分别给传感器供电.该电源管理方案具有欠压保护、过流保护以及过热保护功能,输出电压的纹波较小,符合技术要求.
1.2.2 CAN总线接口电路设计
数据采集模块设计有两路CAN接口,分别是CANIN和CANOUT.CANIN和CANOUT接口在硬件电路的设计上是完全一致,在这里只选择一路CAN总线接口电路方案做详细介绍.为了提高CAN接口的性能和抗干扰能力,设计采用全差分传输方式对CAN总线通信节点实施有效的电气隔离[1,4],应用如图3所示的CAN接口电路.采用ADI公司的ADM3053的隔离式区域网络物理层的CAN收发器模块,该模块还提供隔离电源,能够保证CAN总线在收到工况以及电压纹波的干扰下能够通信,符合设计要求.
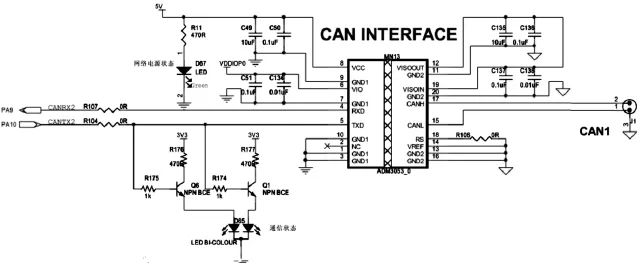
图3 CAN接口电路
1.2.3 数据采集功能模块
数据采集模块由控制电路、开关电源、信号处理电路、高压隔离电路、模拟量采集、开关量采集等构成,实现对车载工况数据的采集.养路机械机车数据采集模块采用CAN总线通讯接口,符合CAN2.0B协议规范.设计了通用DI模块、小电流的DO模块(带高速正交计数),大电流的DO和AO共用模块(带PWM),小电流的AO模块,AI模块等采集模块.实现了对各种现场传感器的信号采集以及各种开关量、电磁阀、比例阀信号的控制.硬件原理如图4所示.

图4 模块原理框图
(1)模拟量输入AI模块
AI功能模块用于采集模拟量输入信号.AI模块是8路全差分输入具有18位分辨率.转换误差小于1 mV,可以单端或差分选择.具有4种不同的模拟量输入范围,模块在工作时,将8路输入的电压信号或者电流信号经ADG1211实现电压电流输入选择、分别接ADG1204多路选择开关(如图5所示),经过选择之后的信号需要加上一个开关电容滤波,送给AD模数转换器AD7634,模数转换之后经光耦隔离模块送入微处理器SAM9X35,再通过CAN总线将输入的模拟量信号传输到主控设备.可以实现电流电压可选的8路全差分输入的高分辨率通用AI模块.

图5 ADG1204多路选择开关
(2)模拟量输出模块
模拟量输出(AO)模块实现8路模拟量输出,芯片采用ADI公司的AD5422的数模转换器,如图6所示,AO模块可以实现电流或电压输出可选的模式:电压输出范围±10 V驱动电磁阀,24 V输出直接驱动设备中的比例阀,电流输出4~20 mA.

图6 AD5422模拟量输出模块
2 软件设计
大型养路机械数据采集模块的设计基于μC/OS-II实时操作系统,将应用程序根据模块、实时性、复杂程度划分为多个相对独立的任务,可以大大提高处理器的使用率和系统的实时性[4-5].
数据采集是系统软件设计的重点,它是在实现低等采集模块配置的基础上进行采集的,优先级仅次于底层采集模块配置程序,即与车载电脑通信的程序,此任务也与机车是否工作有关,机车不工作时,不进行作业参数的采集.本程序包括数据的采集和预处理,将所有的数据采集完之后,存储在数组中,存储是按模拟量、数字量、脉冲量的顺序进行存储,然后根据模块类型进行预处理,处理完成后,按照时间要求,发送处理后的数据到上位机[6].
采集程序流程图如图7所示,在每一种车型上各类型模块数量不一,所占字节也不尽相同,因此需要根据配置信息判断模拟量、数字量和脉冲量在数组中的起始位置.采集时,模拟量、数字量和脉冲量并不是按序号递增顺序排列,ID号是可以随意指定的.
同一类型模块采集数据指令程序相同,采集到的时间根据下位机采集模块的类型发送指令,再根据ID号发出采集数据信息,将采集到的数据存储到数组中,进行预处理之后就通过CAN发送到上位机.

图7 模块数据采集流程
3 结语
本文介绍的大型养路机械数据采集模块硬件设计的整体方案包括系统硬件总体设计以及各个终端采集模块设计方案和工作原理,完成了系统电源管理模块,CAN通信接口电路以及下位机数据采集模块的设计.并进行了硬件调试,在实验室条件下,模拟现场工况,实现了基本功能.根据系统的复杂性和多任务性,采用μC/OS-II实时操作系统,开发了数据采集和预处理程序.
[1]颜剑.基于CAN总线和虚拟仪器技术的车载网络系统的研究[D].长沙:中南大学,2007.
[2]吴桂清,张向荣.基于MiniARM9080的车载监控系统设计[J].电子技术应用,2009(6):110-113.
[3]Wang Haosen,Wang Qin,Zhang Xiaotong,et al.Optimized.Design of Embedded Parallel Data Acquisitio System[J].Computer Engi neering and Design,2011,32(5):1622-1625.
[4]武小平,吴炳廉.基于μCOS-Ⅱ的短信控制信息采集系统[J].计算机应用,2011,31(2):29-31.
[5]Wang Chong,Chen Shuanglong.Design and implementation of signal detection system based on ARM for ship borne equipment[J].Computer Engineering and Design,2011,32(4):1300-1301.
[6]储毅,赵明宇.适用于电动汽车与电网互动的智能车载终端的设计[J].制造业自动化,2013,35(1):59-62.
The design of vehicle data acquisition system on large maintenance machine
HAN Zhu-Qin
(Schoolof Physics and Mechanical&Electrical Engineering,Shaoguan University Shaoguan 512005,Guangdong,China)
To resolve the signal sampling and processing in Large track maintenance machine,the paper designed a multi-channel and multi-mode data acquisition system,which used SAM9X35 as the core,which had a large capacity DDR2 as data cache,transmitted acquisition data to upper-computer by CAN-BUS.The slave computer module can be upgraded online.This paper introduced the overall design,including Power management and CAN communications interface circuits and slave computer data sampling module.According to the complexity and multiple tasks of the system,the real-time operating systemμC/OS-II is adopted in the software platform,developing the procedure of data acquisition and preprocessing.
locomotive system;data acquisition;CAN-bus;μC/OS-II
TP274+.2
A
1007-5348(2014)04-0035-05
(责任编辑:李婉)
2013-12-11
韩竺秦(1982-),男,甘肃白银人,韶关学院物理与机电工程学院教师,硕士,主要从事自动化控制与智能检测方面的研究.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
铁道通信信号(2020年8期)2020-02-06
布达拉(2019年6期)2019-07-18
测控技术(2018年12期)2018-11-25
北方人(2017年10期)2017-07-03
中国公共安全(2017年11期)2017-02-06
中国公路(2017年12期)2017-02-06
电子制作(2016年21期)2016-05-17
电源技术(2015年2期)2015-08-22
电测与仪表(2015年11期)2015-04-09
