基于非等距线阵的水声同步时延差定位算法
2014-02-27 08:27杨志权
水下无人系统学报 2014年3期
杨志权, 尚 凡
基于非等距线阵的水声同步时延差定位算法
杨志权, 尚凡
(中国人民解放军91388部队 94分队, 广东 湛江, 524022)
针对水声定位系统是水中兵器试验或水声对抗任务所必须的基础测量系统, 提出了基于水平非等距线阵定位技术、相关波门修正时延差等技术设计鱼雷水声同步定位系统的快速定位算法, 介绍了该算法的工作原理和实时轨迹修正方法。经Matlab仿真对比验证表明该算法正确可行。该非等距线阵定位系统具有布阵灵活、经济可靠等优点, 可在更广泛的阵元载体平台上安装使用, 为设计鱼雷中远程、短基线或超短基线水声定位系统提供借鉴。
鱼雷; 水声同步定位系统; 非等距线列阵; 时延差; 相关波门; 轨迹修正
0 引言
水声定位系统是水中兵器或航行体进行水下目标探测的必备装备, 是水中兵器或航行体进行水下实时对抗的基础测量系统。因而设计具备准确、实时、可靠、无距离模糊定位等性能的水声定位系统是人们一直追求的目标。在2D运动目标定位领域, 线列阵型接收基阵因具有结构简单、工作可靠等优点而在鱼雷或舰载水声定位系统中被广泛采用。然而由于水声同步定位系统通常采用周期性工作方式导致水声定位系统固有的定位距离模糊问题又严重限制了水声定位系统的无模糊定位测量范围[1]。文献[2]提出了基于水平等距线阵和相关波门修正时延差技术解决距离模糊方法, 由于水下运动载体的流线型外形通常使等距线列阵的安装变得困难, 本文提出基于非等距线阵时延差定位的水声同步定位算法, 并用Matlab程序仿真验证其可行性。
1 非等距线阵时延差定位原理



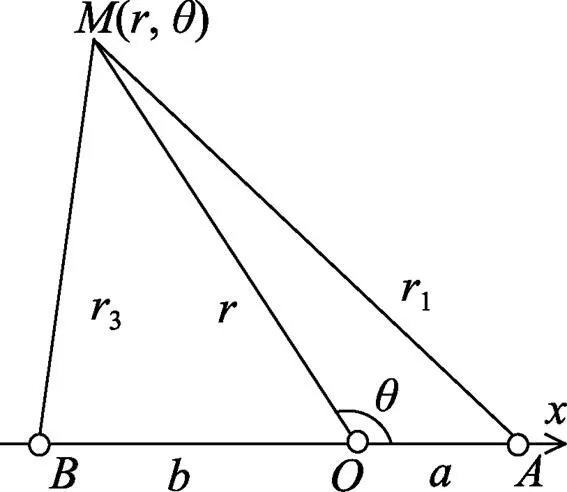
图1 三元非等距线阵同步定位模型
在动点和三元线阵所确定的平面内, 由余弦定理可知


联立式(3)和式(4), 解得
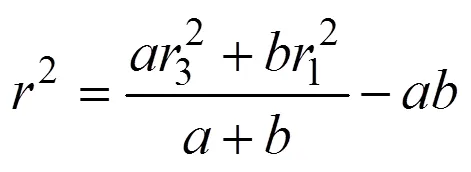

把式(2)代入式(5)和式(6), 得


2 实时轨迹修正技术
2.1 轨迹异常分析





2.2 自动轨迹修正

2.3 稳态轨迹获取
上节自动轨迹修正技术实施的前提是已经获得了准确的定位轨迹, 为此系统需要具备在无其他先验知识的情况下识别跨周期事件发生、鉴别轨迹真伪的能力, 以应对定位系统即使在发生跨周期事件期间开机工作也能实现实时、无距离模糊定位。
由于本文采用3元刚性线阵, 线阵外目标距离线阵各个阵元的距离一般是同时增加或同时减小, 并且当3个阵元接收时延的模糊周期数相同时, 系统可以进行无距离模糊准确定位, 故不妨假定发生跨周期事件的阵元只有1个阵元, 因为若有2个阵元同时发生跨周期事件的情况可以以这2个阵元为基准来修正另一个接收时延即可得到正确的时延差进行定位。
基于以上认识, 可以设计一个专家系统自动进行跨周期事件识别和修正, 输出可以解算出稳态轨迹的时延差序列, 其主要工作原理如下。




3) 同时对经过时延邻帧波门、时延邻阵波门技术处理过的轨迹进行基于时间波门[5]的轨迹质量评估和离散点迹复位处理, 最终获得稳定、正确的定位轨迹。
3 仿真验证
由图2可知, 仿真开始后的0~12 s, 各阵元的接收时延较真值减少1个周期0.1 s, 即均被“截断”; 在12 ~16 s间各阵元依次发生时延“跳变”之后, 时延才和真值相等; 由图3知, 时延差仅在12 ~16 s时间段内依次产生失真。接着, 系统采用时间波门技术对接收时延进行修正(如图4), 第12 ~16 s间的时延差失真已经被消除。图5是按第1节定位算法解算出目标轨迹的极坐标图示, 可见已消除了因接收机周期清零机制所导致的距离模糊问题。以下各图如无特别说明, 横坐标均表示同步时间。

图2 阵元A, O, B接收到的时延示意图

图3 阵元A, O和O, B之间的时延差示意图

图4 采用波门技术修正后的时延差示意图

图5 系统解算出的极坐标示意图
图6和图7是在大地坐标系下设计轨迹与定位轨迹的对比图。对比两图的仿真结果可知, 综合利用水平非等距线阵定位技术、相关波门修正时延差技术可以解决鱼雷水声同步定位系统中的定位距离模糊问题。
4 结束语
本文分析基于水平非等距线阵定位技术、相关波门修正时延差技术设计鱼雷水声同步定位系统的新定位算法, 并介绍了该方法抗定位距离模糊的工作原理。经Matlab仿真定位系统的接收时延、解算轨迹的各种情况对比表明, 该方法正确、可行, 这种鱼雷水声同步定位系统抗距离模糊算法具有布阵灵活、经济可靠等优点, 可在更广泛的阵元载体平台上安装使用, 为设计鱼雷中远程、短基线或超短基线水声定位系统提供技术支持, 具有良好的应用前景。

图6 未采用波门技术的定位轨迹图

图7 采用非等距线阵和波门技术的定位轨迹图
[1] 梁国龙, 杨春, 陈晓忠, 等. 同步水声跟踪定位系统软件抗距离模糊技术研究[J]. 应用声学, 2005, 24(5): 301- 303. Liang Guo-Long, Yang Chun, Chen Xiao-Zhong, et al. On Resolving Range Ambiguities by Software in Synchronous Underwater Acoustic Tracking System[J]. Applied Acoustics, 2005, 24(05): 301-303.
[2] 杨志权, 尚凡. 鱼雷水声同步定位系统抗定位距离模糊算法及仿真[J]. 鱼雷技术, 2014, 22(1):30-34. Yang Zhi-quan, Shang Fan. Anti Positioning Range Ambiguity Algorithm with Simulation for Underwater Synchronism Acoustic Positioning System of Torpedo[J]. Torpedo Technology, 2014, 22(1): 30-34.
[3] 刘孟庵. 水声工程[M]. 杭州: 浙江科学出版社, 2002.
[4] 徐新盛, 丁士圻, 李海森, 等. “超同步周期”水声定位技术研究与实现[J]. 声学学报, 1996, 21(3): 265-271.Xu Xin-sheng, Ding Shi-qi, Li Hai-sen, et al. Analysis and Implementation of “cross sync-period” Underwater Ac- oustical Positioning for Underwater Targets[J]. Acta Acu- stica, 1996, 21(3): 265-271.
[5] 王云峰. 极坐标下雷达多目标跟踪及其实现[J]. 军械工程学院学报, 2000, 12(2): 32-35.Wang Yun-feng. Rradar Multi-target Tracking and its Realization[J]. Journal of Ordnance Engineering College, 2000, 12(2): 32-35.
(责任编辑: 杨力军)
An Algorithm with Time-delay Difference for Underwater Acoustic Syn- chronous Positioning System Based on Non-equidistant Line Array
YANG Zhi-quanSHANG Fan
(91388thUnit, The People′s Liberation Army of China, Zhanjiang 524022, China)
Underwater acoustic positioning system is a basic measurement system for underwater weapon test or underwater acoustic countermeasure mission. This paper presents a fast positioning method for designing underwater acoustic synchronous positioning system for a torpedo based on horizontal non-equidistant line array positioning technology, correlation window corrected time-delay difference technology, etc., and introduces its principle and the real-time trajectory amendment method. Simulation with Matlab shows that this algorithm is feasible and correct. This non-equidistant line array positioning system has the advantages of flexible array deployment, and is economical and reliable, so it can be mounted on a wide range of array element carrier platforms. This study may provide a reference for designing torpedo’s underwater acoustic positioning systems with medium or long distance, and short or ultra-short baseline.
torpedo; underwater acoustic synchronous positioning system; non-equidistant line array; time-delay difference; correlation window; trajectory amendment
TJ630; TB56
A
1673-1948(2014)03-0184-05
2014-01-20;
2014-02-25.
杨志权(1971-), 男, 硕士, 工程师, 主要研究方向为水声工程技术.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
曲阜师范大学学报(自然科学版)(2022年1期)2022-01-23
小哥白尼(军事科学)(2021年8期)2021-11-22
大连民族大学学报(2021年5期)2021-11-15
摄影之友(2021年10期)2021-10-25
初中生学习指导·提升版(2021年8期)2021-08-30
小哥白尼(军事科学)(2020年8期)2020-05-22
舰船电子对抗(2019年2期)2019-05-23
电子制作(2017年22期)2017-02-02