调试误差对GW4型隔离开关产品性能的影响
2014-02-11 02:48李宇鹏王占杰孙玉洲马永旭夏立国
机电工程技术 2014年9期
李宇鹏,王占杰,孙玉洲,马永旭,夏立国
(河南平高电气股份有限公司,河南平顶山 467001)
调试误差对GW4型隔离开关产品性能的影响
李宇鹏,王占杰,孙玉洲,马永旭,夏立国
(河南平高电气股份有限公司,河南平顶山 467001)
针对GW4型隔离开关现场反馈的发热、操作力大等问题,从误差分析入手,指出零部件的加工偏差造成的隔离开关产品与理论设计之间的差异,是运行中产品性能下降的重要原因,并从产品调试方面给出了改进意见。
隔离开关调试方法;通流能力;调试误差
0 引言
GW4型隔离开关产品是一种双柱水平旋转式隔离开关,由于结构相对简单,操作调整容易,在220 kV及以下电压等级的产品中一直占有较大的市场份额。虽然经过了制造厂家的完善化设计,但现场仍有导电回路容易过热,操作力过大等缺陷发生。文献[1]从产品分合闸轨迹优化方面,文献[2-4]从触头结构等方面提出了具体的解决办法。本文从隔离开关调试方法着手,分析调试方法对隔离开关产品的性能影响,希望能为现场产品的稳定运行提供一些参考意见。
1 GW4型隔离开关产品简介
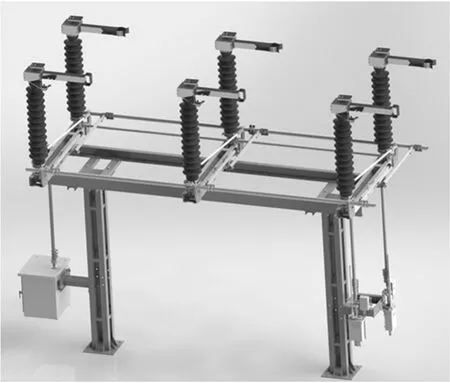
图1 GW4型隔离开关产品外型图(三相机械联动)
GW4型隔离开关为水平双柱旋转式隔离开关(图1),结构形式多为三极机械联动。由底座、支柱绝缘瓷瓶、导电部分和操动机构组成。每极由两个支柱绝缘瓷瓶、导电部分和操作机构组成。每极由两个支柱绝缘瓷瓶相互平行的安装在两端轴承座上,由交叉连杆连接且与基座垂直。主导电部分安装在绝缘瓷瓶上方,与其一起运动。其动作原理为,操作极一侧绝缘子由操动机构带动,绕其转轴旋转90°,通过三极水平连杆传动至其他级同侧绝缘子;各级另一侧绝缘子借助于交叉连杆反向旋转90°,两侧导电部分同时合拢或向一侧分开,从而实现隔离开关产品的合闸或分闸运动[1,3-4]。
隔离开关能否正确分合闸主要取决于底座装配上的交叉四连杆,两侧导电管等尺寸是否配合良好。交叉四连杆的作用是保证产品从分闸到合闸过程中两侧绝缘子旋转90度,导电部分的长短则决定着两侧触头开始接触的位置。
交叉四连杆机构运动(合闸位置)原理如图2所示,主动拐臂长度为r1,被动拐臂长度为r2。设r1转动任意角度B1后,与水平线的夹角由α1的变为α5,则r2转过的角度为B2,与水平线的夹角由α2变为α6。其关系式可表示如下:

式中

隔离开关由合闸转至分闸时,主、被动拐臂转过的角度B1=B2=90°,代入式(1),化简后得

当r1=r2=r,α4=α1=α时,式(2)恒成立,而与两绝缘子间的距离无关。因此,在工程应用中各生产厂家根据结构及绝缘等级的需要确定出不同的交叉四连杆尺寸,并优化各自的导电管长度。
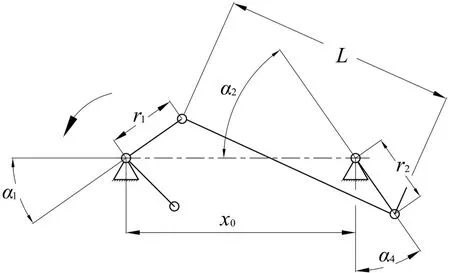
图2 交叉四连杆原理示意图
2 GW4型隔离开关轨迹偏差分
虽然各生产厂家的产品设计尺寸均能满足合闸后可靠接触的要求,但由于加工、装配过程的误差,主动拐臂转过角度B1时,被动拐臂B2会与设计计算角度产生偏差,可能会出现触指单边接触,导致产品的性能下降、操作力变大等缺馅。被动绝缘子旋转误差估算如下所述。
(1)计算出被动绝缘子转过的角度B2式(1)简化变形,并令函数

式中,α2=α4-90°,α5=α1+B1,α6=α2-B2,r1= r2=r,α4=α1=α。
(2)被动绝缘子转过角度B2时的偏差
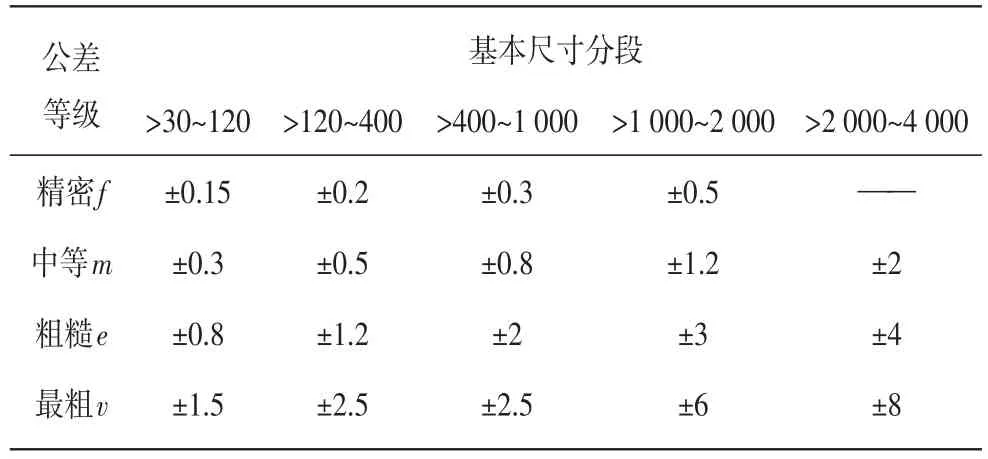
表1 线性尺寸的极限偏差数值
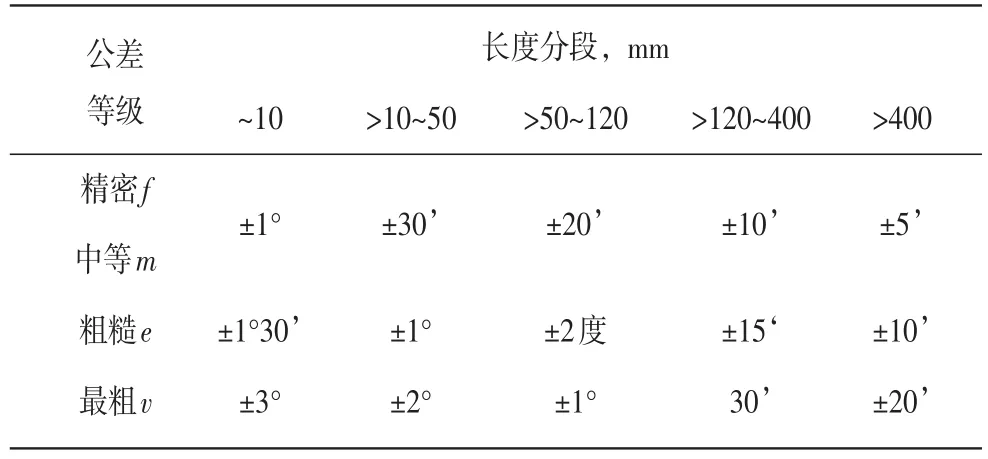
表2 角度尺寸的极限偏差数值
由于上述尺寸均通过独立加工而成,在进行误差分析进将其单独的变量来考虑。由式(1)可以可以求出B2对α1、α4,x0,r1、r2的偏导数,进而求出B2的微分,从表1、表2[5]中选取相应的公差,估算出B2的偏差,求出触头接触点与原有轨迹的偏差Δs(零部件的结构尺寸图3)。

式中
FB2=-(r1r2sin(a5-a6)+x0r2sina6
Fa1=r1r2(sin(a6-a5)-sin(a2-a1))+x0r1(sina1-sina5)
Fa2=r1r2(sin(a5-a6)-sin(a1-a2))+x0r2(sina6-sina2)
Fr1=r2(cos(a5-a6)-cos(a1-a2))-x0(cosa1-cosa5)
Fr2=r1(cos(a5-a6)-cos(a1-a2))-x0(cosa6-cosa2)
Fx0=-r2cosa6-r1cosa1-r2cosa2-r1cosa5)
3 GW4型隔离开关装配调试方法
目前GW4型隔离开关的调试单极装配主要要求分闸位置时,两侧导电管相互平行,合闸时在触指的圆弧部分开始始接触(图3),没有定量的指明具体要求,零部件加工引起的偏差得不到有效的修正,将直接影响设备的安全运行。下面以具体实例说明。
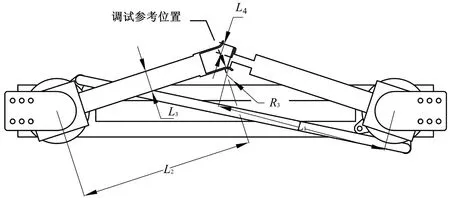
图3 单极装配调试方法
某公司生产的产品,合闸位置时,r1=r2= 150 mm,a1=a4=35°,x0=1 300 mm,L1=665 mm,L2= 662 mm,L3=80 mm,L4= 42.5 mm,R3=30 mm,设计单边压缩量为2.5 mm,三相同期要求不大于20 mm。
按照被动绝缘子较主动拐臂转动的快慢,触指接触时将会出现图4(由左向右依次为:慢、正常、快)中所列的情况。由式(5)可得,合闸后角度最大偏差0.763°,触指偏差在8 mm以上。除了极限情况被动绝缘子转动角度小于正常的情况能够区分外,其他情形很难在调试过程发现,再加上零部件之间的间隙,在合闸时很难发现其与设计要求之间的偏差。在现有调试方法中,即使以与设计完全相符的极作为基准进行调整,相关的误差也不可能完全避免。
一方面,触指偏离设计位置,会导致接两边的接触压力不均,甚至于单边受力,将影响产品的通流能力;另一方面,误差还影响着产品的运动过程(图5),与正常情形相比,单边触指压缩量较大,受力方向偏向一侧,其结果是导致操作过程中力将成倍的增加,降低其运动的平稳性和可靠性。
要改变此种情况,可以通过以下几种措施加以解决:
(1)提高零部件的精度,减小加工装配误差;
(2)提高产品的设计裕度;
(3)改进产品装配调试方法。
前两条措施均将大幅度的提高产品的制造成本,降低产品的市场竞争力;在现有的生产装配条件下,从分闸到合闸的调试方法,改为从合闸到分闸的调过程,即在合闸位置,两侧导电管在自由状态下,保证中心线相互重合,将能有效的降低加工误差引起的产品缺馅。首先,两导电管中心线相互重合,触指两侧压缩量与设计压缩量相同,保证了隔离开关的设计通流能力;同时由于隔离开关合闸对中,避免了隔离开关承受额外的应力作用,提高产品的可靠性。
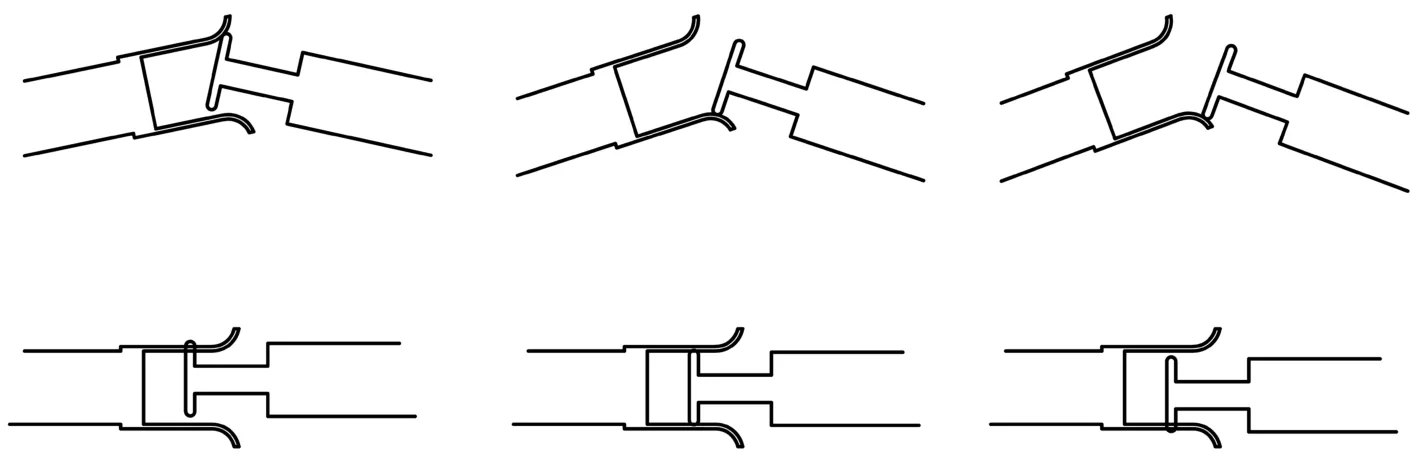
图4 误差引起的触指的接触位
其次,从合闸位置到触头触指接触位置,运动过程极限情况下触指的最大压缩量由11.5 mm减少为4.5 mm(图5、图6),能够保证产品运送的平稳性。
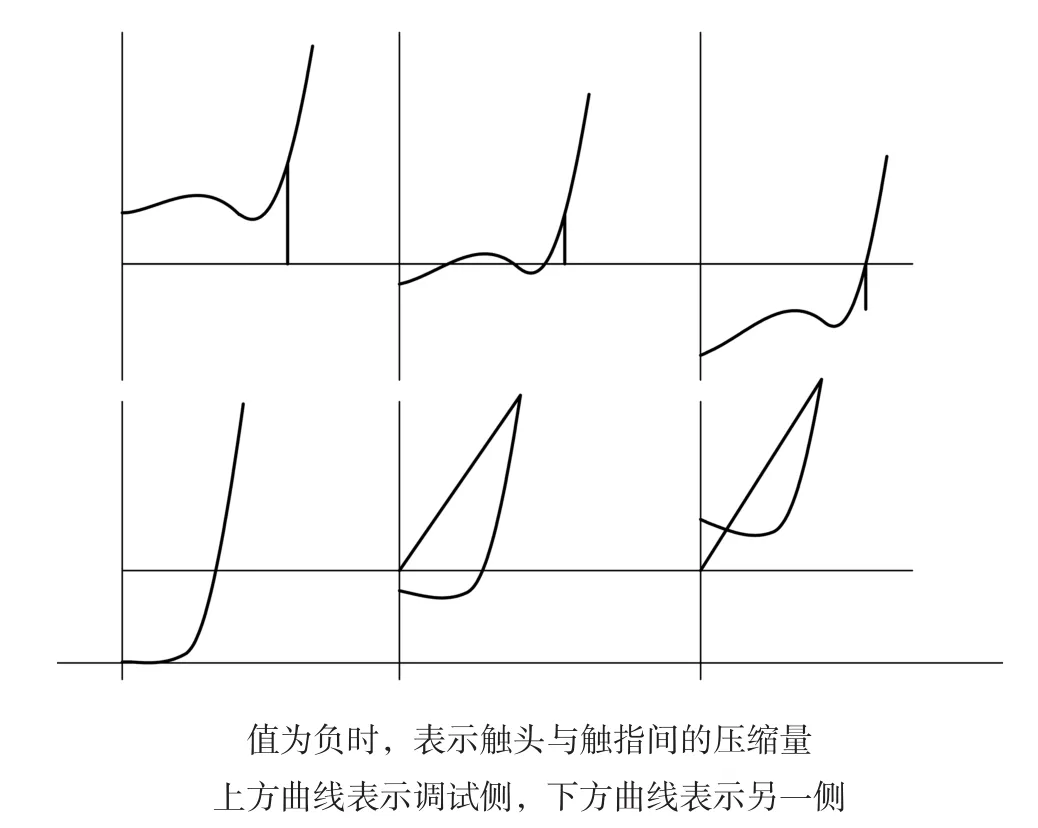
图5 触头与触指间的距离
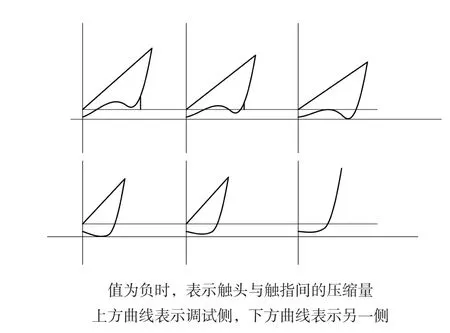
图6 触头与触指间的距离(合闸调试)
第三,三相同期也可以得到满足。按照此种方法调整出的产品,在极限情况下,即触头触指最先接触时,最后接触极的触指与触头间最小距离小于5 mm(图6),能够满足工程需要。
当然,隔离开关调试方法的改变是将合闸误差调整至分闸位置,存在使隔离断口减小的情况,对于绝缘强度有一定的影响;由于调整时,需在导电管自由状态下,需将触头拆下,调整完毕后再装配,将增加现场的工作量。
4 结论
笔者通过误差分析的方法,指出现场反馈的部分零部件加工偏差将会引起运动卡滞等问题,并给出了偏差的计算和通过调试修正的方法,对于GW4型产品的现场运行性能提高具有一定的指导意义。
[1]常林晶,徐光辉,乔岩泽,等.GW4型隔离开关产品分合闸轨迹分析及优化改进措施[J].高压电器,2013(4):134-138.
[2]李兴旺,吕鸿,卢启付,等.G4型隔离开关发热缺陷分析及处理[J].广东电力,2012(9):103-106.
[3]倪汇川,李传江,朱德亮,等.GW4型隔离开关安装调试的一个典型问题分析[J].安微电力,2011(9):9-11.
[4]张鑫,吕峰.GW4型隔离开关安装调试的方法[J].科技创新与应用,2012(28):68-69.
[5]GB/T 1804-2000.一般公差未注公差的线性和角度尺寸公差[S].
Influence of Debugging Error on the Performance of GW4 TYPE Disconenctor
LI Yu-peng,WANG Zhan-jie,SUN Yu-zhou,MA Yong-xu,XIA Li-guo
(He'nan Pinggao Electric Co.,Ltd,Pingdingshan467001,China)
According to problem of GW4 type disconnector from market,such as about temperature rise,torque etc.,utilize tolerance's analysis way,points out that the difference caused by parts'tolerances between the disconnector product and the theory of design,is the main reason of degrade the performance in service,and gives some advices on disconnector adjusting.
adjusting method of disconnector;capability of carrying current;debugging error
TM564
A
1009-9492(2014)09-0055-04
10.3969/j.issn.1009-9492.2014.09.015
李宇鹏,男,1971年生,河南平顶山人,大学本科,工程师。研究领域:高压开关设备的设计及工艺。已发表论文9篇。
(编辑:向 飞)
2014-03-11
猜你喜欢
金属加工(热加工)(2022年9期)2022-09-20
科技与创新(2022年11期)2022-06-14
电力安全技术(2022年4期)2022-05-30
水电站机电技术(2021年12期)2021-12-21
设备管理与维修(2020年23期)2021-01-04
数字通信世界(2019年3期)2019-04-19
电子制作(2016年11期)2016-11-07
电测与仪表(2015年20期)2015-04-09
水电站机电技术(2014年4期)2014-10-13
河南科技(2014年4期)2014-02-27