
工业机器人码垛手爪的结构设计
2014-02-10 10:39:04陆宗学卞绍顺
机电工程技术 2014年2期
刘 勇,陆宗学,卞绍顺
(连云港杰瑞模具技术有限公司,江苏连云港 222006)
工业机器人码垛手爪的结构设计
刘 勇,陆宗学,卞绍顺
(连云港杰瑞模具技术有限公司,江苏连云港 222006)
介绍了一种适用于大尺寸料袋的机器人气动手爪。为了提高设计效率和可靠性,首先在Solidworks中建立三维模型,并采用有限元仿真插件simulation进行仿真,仿真结果和实际操作表明,该手爪结构可靠合理,满足了生产需求。
机器人;手爪;Solidworks;仿真
机器人的应用普及,提高了生产效率,而且对保障人身安全、改善劳动环境、减轻劳动强度及降低成本具有十分重要的意义。机器人动作实现由机器人本体和末端执行器共同完成。机器人本体及相关控制已经规模化,而末端执行器由于完成任务的不同,呈现多样化的特点。
1 机器人末端执行器简介
末端执行器也叫机器人的手部,它是安装在工业机器人手腕上直接抓握工件或执行作业的部件。包括从气动手爪之类的工业装置到弧焊和喷涂等应用的特殊工具。由于机器人的多方面应用,末端执行器通常针对某一特殊场合进行专门设计。它的设计依据工件的特定参数和工作空间的环境,同时还需要考虑自身的重量和转动惯量,以保证机器人实现的技术条件,确保机器人操作时安全可靠。机器人末端执行器大致分为以下几类:夹钳式取料手;吸附式取料手;仿生多指灵巧手[1]。本文论述的是码头料袋码垛抓手,目的工件具有体积大、重量大的特点。
2 手爪的结构设计
2.1 码垛手爪的设计要素
机器人手爪设计需要考虑多方面的因素,具体如下。
(1)手爪工作目标的重量、大小及材质
对于不同对象的工件选择不同的手爪,如板料类工件可采用真空吸附式;对于导磁性介质可采用磁力吸盘;对于PVC料袋等采用夹钳式。
(2)机器人机型的选择
机器人最大负载能力和工作半径,机器人的转动惯量,机器人的价格。
(3)手爪的经济工作方式
采用电动、气动、液压等作为动力来源,涉及的结构及其制造、使用和维护成本不一样,利用现场环境可提供的动力能够降低制造成本。
(4)手爪前端送料的输送带的结构
对于料袋抓取的辊子输送带一般有国标,需要采用标准的接口,而对于皮带输送带,就要考虑怎样来实现。
(5)机器人运动末端工件放置的空间布局。
2.2 基于Solidworks的抓手结构设计
本例设计抓手所抓取的工件为麻袋,成型尺寸为880 mm×700 mm×250 mm(长×宽×高),重量为80 kg,输送带末端承接检测台为辊子输送带,辊子间距为80 mm,现场有压缩空气提供,根据以上信息决定采用夹钳式结构。抓手主要功能为抓紧时气缸推动摆抓,抓住料袋,随后压紧气缸推动压板,将料袋压紧放置搬运过程中甩出;放料时压紧气缸松开,抓紧气缸推动摆抓,将料袋放下。
Solidworks软件功能全面,简单易用,本案例利 用 Solid⁃works进行结构设计。设计流程如下:先绘制结构简图,保证设计的主要尺寸能够完成动作要领,然后在结构简图的基础上进行详细的零件设计和虚拟装配。三维图如图1所示。

图1 码垛手爪
3 手爪的仿真分析
Solidworks Simulation是一款基于有限元(即FEA数值)技术的设计分析软件,对Solidworks的零件和装配体的几何模型、载荷和支撑进行离散化处理后,将几何模型划分成有限单元的网格来进行求解[2-3]。手爪与料袋的直接接触面为齿部,齿部受力后容易向下产生挠度,首先分析其强度。齿部采用25×18扁钢成型,为了降低自重,对其背部进行去除部分材料。经过在静态情况下对固定面和受力面进行限定后,求解如下。
如图2所示,应力图以齿部和摆动部分的连接面为固定面,载荷为90 N的均布力作用在齿面上形成,最大应力值为3.635×107N/m2,材料屈服强度为最大应力值为2.2×108N/m2,符合设计要求。
如图3所示,齿部最大位移为0.8 mm,该变形形成基于材料的弹性变形小变形阶段,当失去负载时,能够恢复,达到设计要求。
如图4所示,齿部最大应变为0.001 mm,较零件长度几乎可以忽略。
综合以上模拟,爪部设计可靠,能够满足使用需求。

图2 齿部应力图
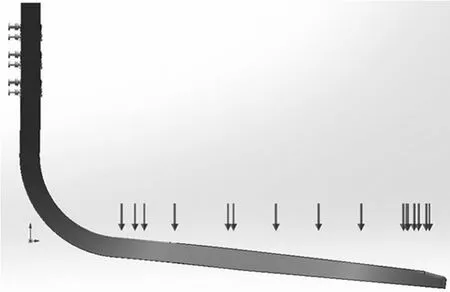
图3 齿部位移图
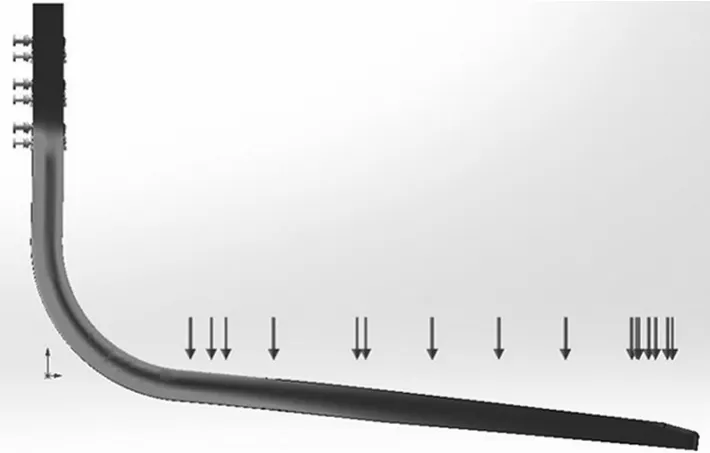
图4 齿部应变图
4 结论
应用Solidworks及其仿真插件Solidworks Simu⁃lation进行机器人码垛手爪设计和仿真,缩短了设计时间,利用软件分析实现了零件的轻量化设计,降低了自重,为机器人选型提供了可靠的保证。本例进行实际生产后设备运行稳定可靠,取得了良好的效果。
[1]蒋刚,龚迪琛,蔡勇,等.工业机器人[M].成都:西南交通大学出版社,2011.
[2]张奔,卞新高,朱灯林.用于抗洪打桩的四足机器人结构设计[J].机电工程,2012(11):1259-1263.
[3]陈超详,叶修梓.Solidworks Simulation基础教程[M].北京:机械工业出版社,2010.
The Structure Design of Robot Hand for Handing
LIU Yong,LU Zong-xue,BIAN Shao-shun
(Lianyungang JARI Extrusion Mould Technology Co.,Ltd,Lianyungang222006,China)
Introduced one kind of robot hand for handing which suits for big and heavyweight bag.In order to improve design efficiency and reliability,three-dimensional model was created by the software of Solidworks,and simulated by Solidworks Simulation.The results showed that the hand is reasonable and can satisfy the requirement of production.
robot;hand;Solidworks;simulation
TP242
A
1009-9492(2014)02-0044-02
10.3969/j.issn.1009-9492.2014.02.013
刘 勇,男,1984年生,湖北宜昌人,大学本科,工程师。研究领域:机械设计及其自动化。
(编辑:向 飞)
2013-08-28
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:22:06
重型机械(2020年3期)2020-08-24 08:31:48
电子制作(2019年20期)2019-12-04 03:51:36
电子制作(2018年24期)2019-01-03 02:30:30
荣誉杂志(2017年7期)2017-08-23 08:05:59
设备管理与维修(2016年5期)2016-03-16 02:20:53
橡胶工业(2015年10期)2015-08-01 09:06:02
机械工程师(2014年12期)2014-12-23 06:44:04
电视技术(2014年7期)2014-03-11 15:36:57
河南科技(2014年14期)2014-02-27 14:11:53
