
基于不完全齿轮齿条转向的避障小车研究*
2014-02-10 10:34邹光明王东雄尹志朋刘源泂
机电工程技术 2014年3期
邹光明,王东雄,尹志朋,刘源泂,沈 欢
(武汉科技大学机械自动化学院,湖北武汉 430081)
基于不完全齿轮齿条转向的避障小车研究*
邹光明,王东雄,尹志朋,刘源泂,沈 欢
(武汉科技大学机械自动化学院,湖北武汉 430081)
设计了一种以不完全齿轮和齿条啮合来控制转向的避障小车。小车在前行过程中能自动避开相隔一定距离的障碍物。该小车由转向系统、传动系统和车架等组成。转向系统由两个不完全齿轮与齿条啮合驱动转向轮转向;传动系统由齿轮机构组成。实践表明该避障小车的设计是合理可行的。
不完全齿轮;齿条;避障小车;转向系统
根据第三届工程训练大赛的主题,对避障小车进行了设计。设计要求为:给定4 J的重力势能,根据能量转换原理,设计一种小车,该小车可将4 J的重力势能转换为机械能驱动小车行走,并且在前行过程中能够自动避开设置在赛道上的固定间距为1 000 mm的障碍物。对于避障小车的研究一直以来受到全国各高校及研究机构相关人员的关注,他们的研究取得了一些成果,并已有相关文献发表[1-3]。
1 小车方案设计
通过对小车进行功能分析可知小车需要完成的功能有:实现重力势能的转换、驱动自身行走、自动避开障碍物。根据小车所要完成的功能将小车划分为传动系统、转向系统和车架等部分。
1.1 转向系统方案设计
转向系统是本小车设计的关键部分,直接决定着小车的绕障功能。转向系统需要尽可能地减少摩擦损耗,具有结构简单、零部件易获得等基本条件,同时还需具有特殊的运动特性——能够将连续的旋转运动转化为转向杆的往复摆动,从而带动转向轮左右转动实现转向避障的功能。转向系统的方案主要考虑以下几种形式。
(1)凸轮机构。通过对凸轮机构的设计可以达到运动特性的要求,但是凸轮轮廓加工较困难,一旦凸轮轮廓如果加工不准确小车运动轨迹将发生很大的变化。
(2)曲柄摇杆机构。根据文献[4]知曲柄摇杆机构可以将连续的旋转运动转化为转向杆的往复摆动,然而曲柄摇杆机构有急回特性,这将不利于小车稳定转向。
本小车转向系统采用不完全齿轮齿条机构。在文献[5]基础上设计如图1所示的转向系统,转向系统主要由两个不完全齿轮、双面齿条和转向杆等部分组成。两个不完全齿轮所在的轴以相同的角速度转动。当不完全齿轮1与齿条上齿面啮合时(此时,不完全齿轮2与齿条下齿面未啮合),不完全齿轮1带动齿条向前运动,带动转向杆向前运动,驱动小车前轮向右转动;同理,当不完全齿轮2与齿条下齿面啮合时齿条向后运动,带动转向杆向后运动,驱动小车前轮向左转动。如此往复循环,实现小车绕障运动。

图1 小车转向系统简图
1.2 传动系统方案设计
传动机构的功能是把动力和运动传递到驱动轮上。要使小车行驶的距离更远并按设计的轨迹精确地行驶,传动系统必须具备传递效率高、传动稳定、结构简单、重量轻等特点。传动系统的方案主要考虑以下几种形式。
(1)采用带传动。将重物的重力势能通过皮带传递给后轮和转向系统。以此达到设计目的。根据文献[6]知道带传动具有结构简单、传动平稳、价格低廉、缓冲吸震等特点但其效率及传动精度并不高。
(2)采用齿轮传动。通过齿轮啮合将能量传递给后轮和转向系统,使小车在前行并成功绕障。齿轮副具有效率高、结构紧凑、工作可靠、传动比稳定等特点。
本小车传动系统采用齿轮传动。
2 小车详细设计
2.1 转向系统
根据小车转向系统的工作原理分析可知:重物在匀速下落的过程中,小车的运动轨迹将是由几段抛物线组成,如图2所示。图2中A为小车偏离赛道中心线最远距离,a为相邻障碍物之间的间距。

图2 小车运行轨迹
由图2可得在一个周期内,小车的运动轨迹方程如式(1)。
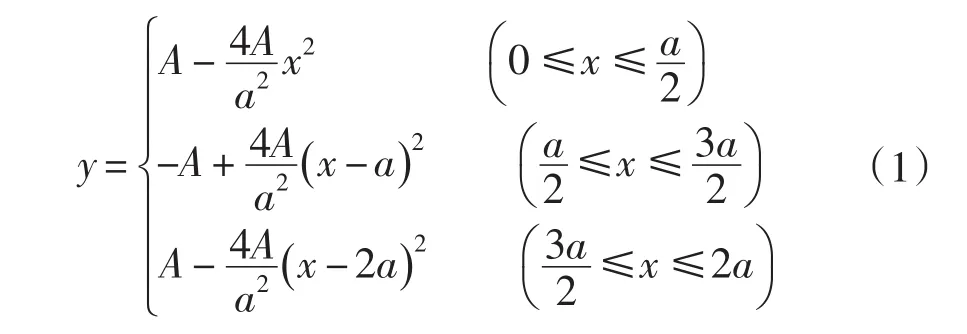
选取前四分之一个周期为研究对象,对式(1)的第一式求导得:

由于运行轨迹线上每点切线的斜率为前轮偏离水平位置的正切值,即:

式中,β为转向杆的转角。
设齿条运动过程中的最大位移为b,齿条中心线与前轮支架的距离为c,如图3所示,规定β在转向杆右边为正,左边为负。
小车运行过程中如偏离赛道中心线较远,则前行的直线距离减小;如偏离赛道中心线较近时,小车又容易碰倒设置的障碍物。因此,考虑小车的结构紧凑性和运行稳定性,设小车偏离赛道中心线的最远距离A=120 mm。从小车整体结构考虑,如c值取值较大则会使车体结构变大,造成小车结构不紧凑;如c值取值较小则所需转向的力较大,能量消耗大。综合考虑后取c=30 mm,则根据式(3)得b=28.8 mm。小车转向系统的三维图如图4所示。
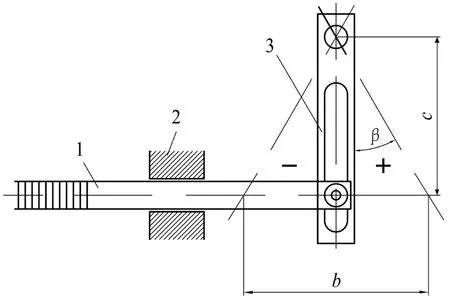
图3 转向杆与齿条的关系


图4 小车转向系统三维图
2.2 传动系统
小车传动系统如图5所示,其中图5(a)为重物降落滑轮子系统,图5(b)传动子系统,图5(c)不完全齿轮齿条子系统。如图5(a)所示,随着重物1的下降,重物势能由绳通过定滑轮2传到定滑轮3上,定滑轮3的转动带动与定滑轮3同轴的齿轮6、7(如图5(b)所示)一起转动;齿轮6与后轮轴上齿轮4啮合使后轮向前运动。齿轮7与齿轮8、9同时啮合。齿轮8、9的转动分别带动与齿轮8、9同轴的上下两个不完全齿轮12、13(如图5(c)所示)转动,这样能量便顺利地传递到转向系统。

图5 小车传动系统
通过分析,齿轮8、9和齿轮7的齿数比分别为1︰1,齿数均为38;齿轮4和齿轮6的传动比为5︰1,齿轮6齿数为70,齿轮4齿数为14。所有齿轮模数均为m=0.5 mm。
2.3 车轮直径
主动轴上的齿轮6与后轮轴上的齿轮4相啮合,带动后轮转动,又通过齿轮7与齿轮8、11的同时啮合带动半齿轮齿条机构运动。设半齿轮角速度为ω,后轮角速度为ω',ω与ω'呈线性关系。通过对传动系统的分析知ω=5ω',即半齿轮转动一周后轮转动5周,也就是说,在一个转向周期内,后轮转过5圈。
设小车所运行的路程为L,则一个周期内小车前行的距离为:

设后轮直径为D1,则一个周期后轮走过的距离为:L=5×πD1,计算得:D1=132.06 mm,故后轮的直径D1取132 mm。
为了使小车能灵活转向小车的前轮直径取60 mm。
2.4车架
车架是避障小车的基础,小车所有其他的部件全部固定在小车上。车架必须满足重量轻,结构合理等特点。由于小车所承受的载荷比较小,选用5 mm的铝合金板材来加工车架。考虑小车的装配性,车架的基本尺寸为220 mm×110 mm× 5 mm。为了安装其他部件还应在车架上加工相应的槽和孔。所设计出小车整体结构如图6所示。
Study on the Obstacle Avoidance Car Based on Incomplete Gear Rack Mechanism for Steering
ZOU Guang-ming,WANG Dong-xiong,YIN Zhi-peng,LIU Yuan-jong,SHEN Huan
(School of Machinery and Automation,Wuhan University of Science and Technology,Wuhan430081,China)
A car whose steering system is based on incomplete gear and rack is designed.The car could automatically avoid an obstruction at intervals when running.The car is composed of steering system,transmission system and frame.Steering system driven by two incomplete gear and rack joint steering wheel steering;Driving system consists of gear mechanism.Practice shows that the design of the car is feasible.
incomplete gear;rack;obstacle avoidance car;steering system
TH122
A
1009-9492(2014)03-0008-03
10.3969/j.issn.1009-9492.2014.03.003
*国家自然科学基金资助项目(编号:50805108,51175388)
2013-09-26
猜你喜欢
中国造纸(2022年8期)2022-11-24
汽车维护与修理(2022年5期)2022-09-06
一重技术(2021年5期)2022-01-18
水运工程(2020年2期)2020-02-26
小学生学习指导·爆笑校园(2019年6期)2019-09-10
物流技术与应用(2019年6期)2019-07-16
测控技术(2018年5期)2018-12-09
电子制作(2018年10期)2018-08-04
水利科技与经济(2016年7期)2016-04-25
重型机械(2016年1期)2016-03-01
