
基于PLC的PID-模糊控制算法在水箱液位控制系统中的应用
2014-02-08 02:01:58张娜
沈阳工程学院学报(自然科学版) 2014年2期
张娜
(沈阳工程学院自动化学院,辽宁沈阳110136)
JBS-GK04型过程控制实验装置包括液位、压力、流量、温度4个典型控制参数,可进行单回路、串级、前馈、解耦等控制实验.控制器采用西门子S7-200PLC,上位机采用组态王6.51和S7-200编程软件开发的人机操作界面.液位控制是该控制装置的一部分,系统设计时液位控制采用的是PID控制方式,通过改变变频器的输出改变水泵的转速来实现液位的控制.工艺流程如图1所示.

图1 液位控制系统工艺流程
模糊控制属于智能控制的范畴,是在总结人类自然语言概念、操作经验的基础上,模拟人类智能的一种控制方法,是一种非线性控制器,对过程参数的变化和外界扰动适应性强.
模糊控制不能完全消除稳态偏差,而PID控制器能解决这一问题,如果在控制偏差很大的时候采用模糊控制,而偏差小于一定控制值时切换到PID控制,这样系统就能根据偏差的大小改变控制量的大小,既可以解决系统非线性的问题,又可以快速、准确地达到控制目的.
采用模糊控制和PID控制相结合的控制方式,控制双容水箱液位,控制器采用西门子S7-200PLC.模糊控制和PID控制在PLC上实现具有编程简单、参数修改方便、抗干扰能力强的优点,在实际应用中取得了较好的应用效果.
1 模糊控制算法设计
1.1 论域设计
选取液位给定值与液位实际值的偏差e(t)及偏差的变化ec(t)作为模糊控制器的输入,控制量变化量Δu(t)作为模糊控制器的输出.偏差e(t)的基本论域取[-100,100],偏差变化率ec(t)的实际变化范围难以确定,可根据系统响应速度要求,选择基本论域为[-5,5],输出Δu的基本论域为[-10,10].综合控制精度、系统的稳定性、算法的复杂程度等方面因素,模糊化后E、EC、ΔU的论域均为{-3,-2,-1,0,1,2,3}.
1.2 隶属函数设计
覆盖模糊论域的子集数目应当适当,较多时虽可以提高控制精度,但模糊规制数目相应地会增加得更快,致使运算量大幅增加.综合以上因素E、EC、ΔU的模糊子集选为7档,为NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中),PB(正大).隶属函数采用三角型隶属函数,三角函数的解析表达式见下式,E、EC、ΔU的隶属函数如图2所示.
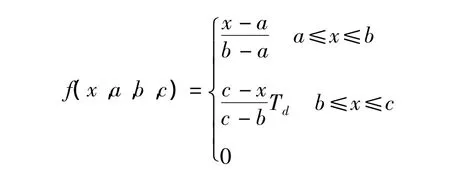
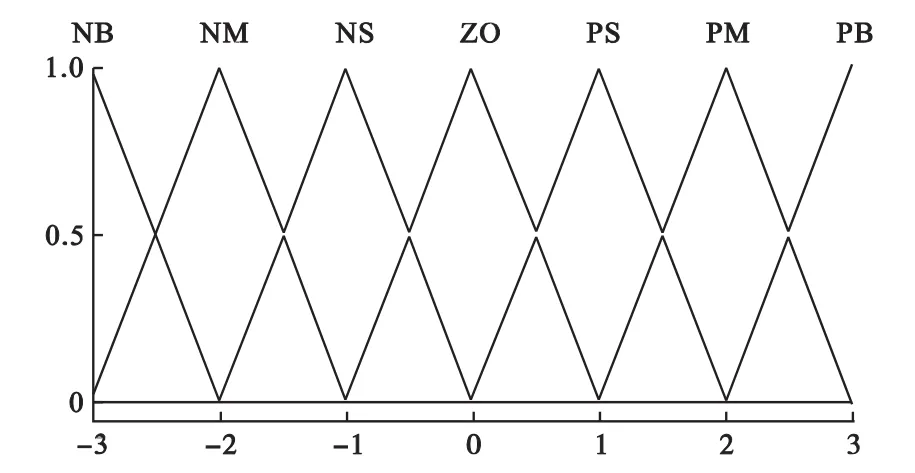
图2 E、EC、ΔU的隶属函数
1.3 模糊推理
为了加快控制速度,减少时间消耗,本设计采用离线计算在线查表的方法,将控制量的变化制成查询表存入PLC中,运行中每一对及都对应唯一的控制量变化量,只要找到的值,就能输出控制结果.对应的控制策略如表1所示.
2 模糊控制在西门子S7-200PLC中的实现
2.1 控制量地址计算
查询模糊控制表采用基址+偏移地址的方法.模糊控制查询表按照从左到右,从上到下的顺序依次存入VB300-VB348中,则控制量的基址为300.例如,将输入论域{-3,-2,-1,0,1,2,3}均转化为{0,1,2,3,4,5,6},则地址偏移量为E×7+EC,加上控制量的基址300,则控制量地址为300+E×7+EC.
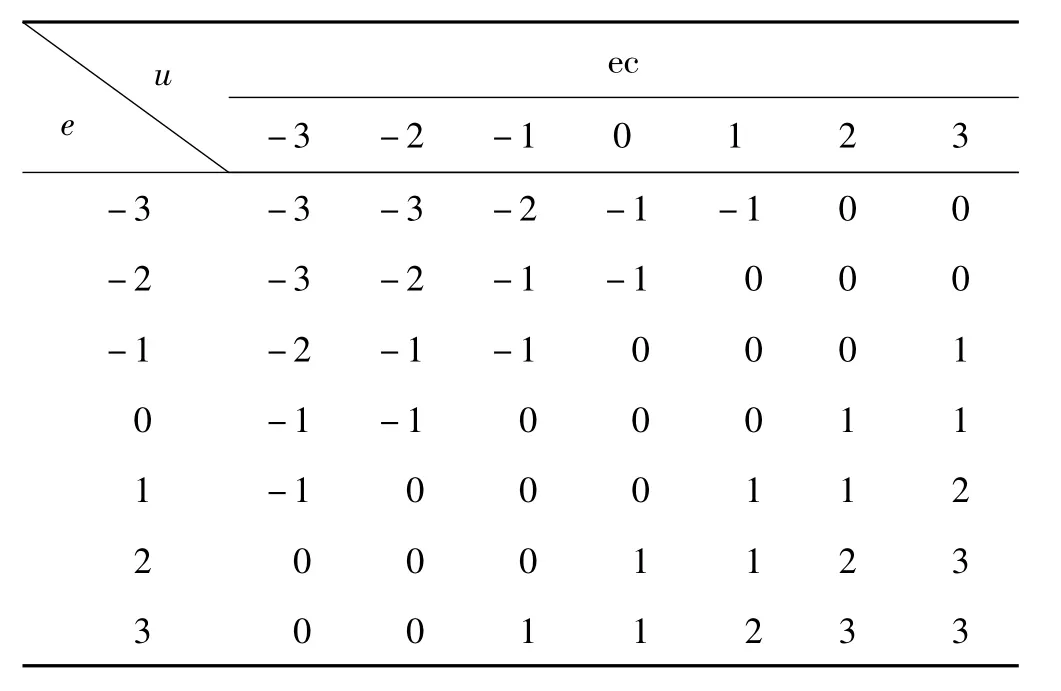
表1 模糊控制器查询表
2.2 反模糊过程
偏差E和偏差变化率的模糊化结果分别存在VB200及VB202中,控制量变化量ΔU的查询结果存在VD300中.PLC输出4~20 mA电信号,对应变频器的输出0~50 Hz,查表所得结果要乘以(10÷3)×(32 000-6 400)÷50,再加上现有控制量,即得输出控制量值.
PLC工作流程图如图3所示.模糊化及反模糊化程序如下.
模糊化程序:

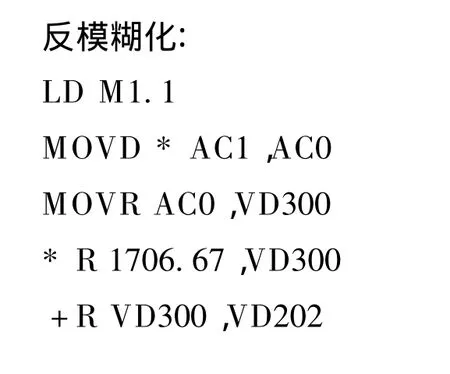
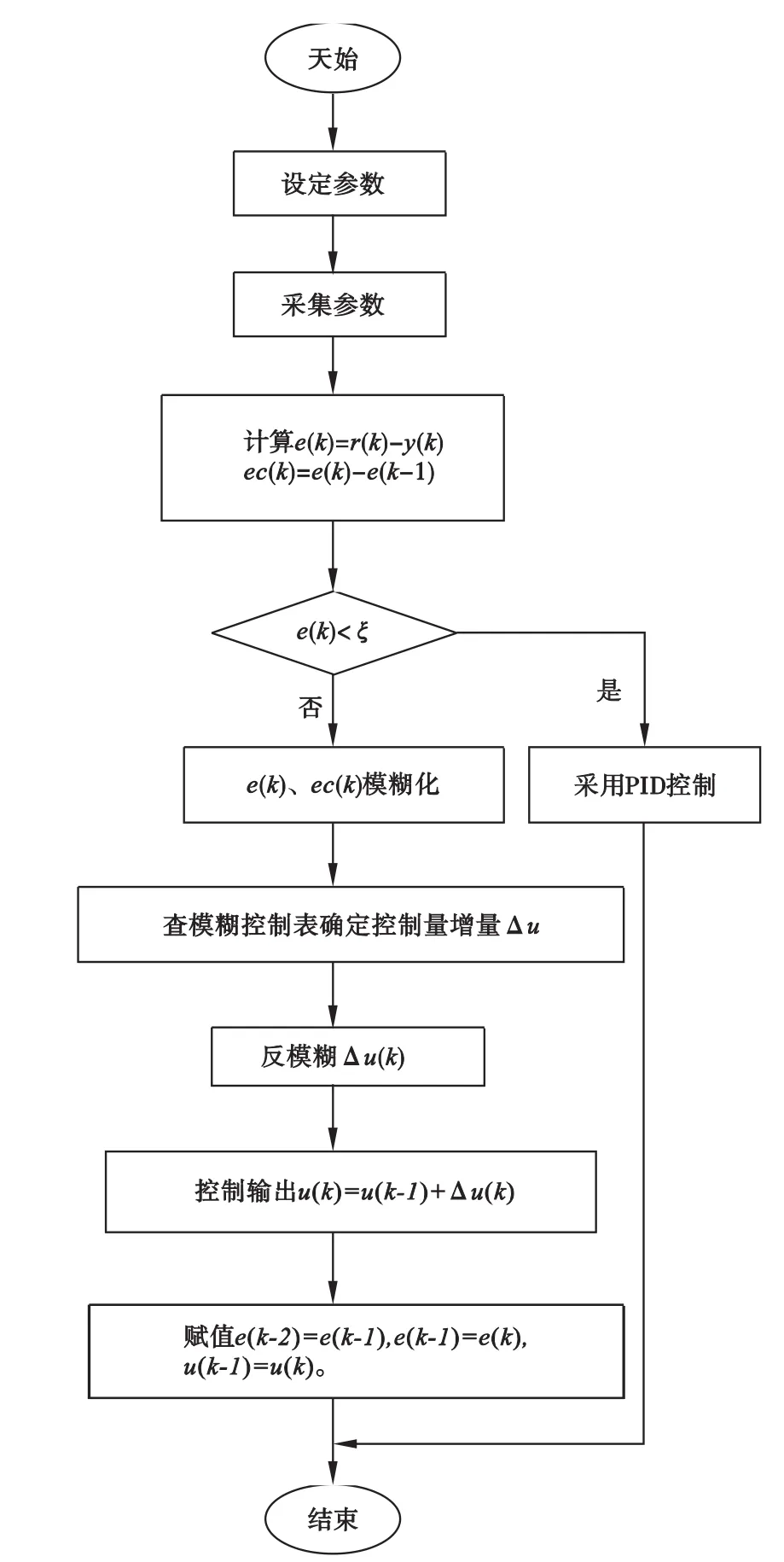
图3 PLC工作流程
3 控制效果
上位机监控采用组态王监控软件设计,红色曲线为实际测量值,绿色曲线为给定值,蓝色曲线为变频器输出,纵轴为液位百分比,横轴为时间.图4、图5分别为PID-模糊控制器调节过程曲线和PID控制器调节过程曲线.曲线是给定值发生7.5%扰动的调节过程曲线,系统设定偏差限值ξ=4,采用PID-模糊控制算法时,PID参数为Tp=20,Ti=10,Td=2,原系统中PID控制器参数为Kp=20,Ti=14,Td=2.从运行曲线可以看出,系统采用PID-模糊控制器后响应速度加快,调节时间缩短,调节过程更平稳,同时能消除稳态偏差.
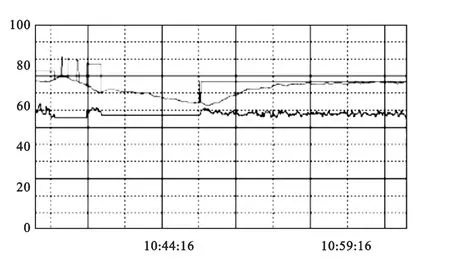
图4 PID-模糊控制器调节过程曲线

图5 PID控制器调节过程曲线
[1] 乡碧云,皮云云.基于模糊PID在饼干生产线温度控制的研究[J].机电工程技术,2013,42(6):18-21.
[2] 刘文远,毛一之,杨子亮.基于西门子PLC的模糊控制在电弧炉电极调节中的应用[J].电气传动,2012,42(10):78-80.
[3] 陈水生,孟庆建.基于PLC的温度PID-模糊控制系统设计与仿真[J].农机化研究,2011,6(6):49-53.
[4] 徐春晖.基于PLC的过程控制实验装置液位模糊PID控制[J].计算机工程应用技术,2011,7(16):3967-3968.
[5] 林勇坚.基于PLC的模糊控制算法在液位控制中的应用[J].电子世界,2013(10):97-80.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
现代装饰(2020年7期)2020-07-27 01:27:50
运筹与管理(2019年10期)2019-12-17 06:07:12
测控技术(2018年10期)2018-11-25 09:35:52
西南交通大学学报(2016年3期)2016-06-15 20:29:35
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2016年2期)2016-02-27 09:04:56
