运动图像解析标定框架改进及算法
2014-02-05 02:08:56霍洪峰赵焕彬
实验室研究与探索 2014年2期
霍洪峰, 赵焕彬
(河北师范大学 体育学院, 河北省人体运动生物信息测评重点实验室, 河北 石家庄 50024)
0 引 言
体育运动中,人体的运动多是复杂的三维空间运动,若要准确定量描述人体的运动特征,须进行三维立体摄像与解析。立体摄像测量方法是采用两台或多台摄像机,从不同角度对同一研究对象进行同步拍摄,进而把所拍摄的平面影片或录像带进行数字化,获得所需的人体三维运动的空间坐标,计算有关的运动学参数[1-3]。三维图像解析是体育科研工作者获取人体运动学特征常采用的研究方法[4-8],人体运动的三维图像解析技术关键是确定三维物体的实际坐标系到摄像机上图像坐标系的映射关系。针对不同的成像模型学术界提出了一系列经典的定标算法,主要有DLT线性算法、非线性算法、两步算法和主动定标法等[9],定标算法标定精度和可靠程度将直接影响到测量结果的精度[10]。许多学者对摄像机标定技术及算法进行了研究[11-12],其中DLT算法被广泛应用于图像解析,实际使用中具有如下的优点:各相机光轴不需相交;相机位置可任意放置而不需测量;只需两部相机即可获取三维坐标;可使用更多的相机,使获取的三维坐标精度更高等[13-14]。但在实际应用中,由于算法的限制,选择特征点时需要充满整个空间,因此,一般选择的标定物都比较复杂,国内大多数体育科研单位和高校所使用标定框架为放射状框。放射状框架因其安装与携带不便,标定球容易混淆及相互之间容易遮挡,方向杆固定等缺点,影响了运动学特征获取的顺利进行。
本文通过设计标定框架改进了放射状框架存在的可操作性差等问题。基于DLT线性算法和张正友定标算法的优点,提出了一种适用于体育运动图像解析的定标算法,为编制三维解析系统时提高精度,实现人体运动特征的快速反馈提供可靠的理论与技术依据。
1 三维重构算法
1.1 定标算法基础
DLT算法是通过对标定框架的拍摄,然后求出摄影系数来实现的,即从摄影测量学的角度研究摄像机图像和环境物体之间的关系,建立摄像机成像几何的线性模型。由线性方程求解线性模型参数。

式中:(R,t)称为外部参数,分别代表3×3的旋转矩阵和3×1的平移向量;K称为内部参数;(u0,v0)是主点(即光轴与图像平面的交点)坐标;fu为图像u轴尺度因子;fv为图像v轴尺度因子。令P=K(R,t),则P为一个3×4的矩阵,
这时有:
即
p11X+p12Y+p13Z+p14-p31Xu-p32Yu-
p33Zu-p34u=0
p21X+p22Y+p23Z+p24-p31Xv-p32Yv-
p33Zv-p34v=0
限定条件p34=1。为了提高精度,总是要使观察值的个数多于求解联立方程的个数,因此,选定空间的6个以上坐标点,将图像坐标(ui,vi)和对应的空间点坐标(X,Y,Z)代入上面的方程就能线性求解出摄像机参数(p11,p12,p13,p14,p21,p22,p23,p24,p31,p32,p33)[15]。
1.2 定标算法改进
从DLT标定方法出发,其中选择的标定点限制在坐标平面上,利用位于X=0和Y=0两平面上的标定球,将相应的实际三维空间坐标和图像二维坐标代入DLT线性算法中的线性方程求解出摄像机内外参数,求解出摄像机拍摄的运动图像上二维点的三维空间坐标。具体过程及数学推导如下:
(1) 建立空间坐标系XYOZ。
(2) 设置好摄像机各项参数,固定摄像机的位置,将标定板分别平行于XOZ平面和YOZ平面拍摄。
(3) 利用图像分析程序得到图像中特征点的坐标(xi,yi),测量出此特征点的实际空间坐标(Xi,Yi,Zi)。
(4) 将(xi,yi)和(Xi,Zi)代入方程组:
解得p11,p13,p14,p21,p23,p24,p31,p33,p34。将(xi,yi)和(Yi,Zi)代入,得:
解得p12,p13,p14,p22,p23,p24,p32,p33,p34。
(5) 保持摄像机参数不变,拍摄运动图像,将图像上关节点坐标(u,v)代入下式
其中,P=pij(i=1,2,3,j=1,2,3,4)。用两个摄像机拍摄的图像解方程解出关节点实际空间坐标(X,Y,Z)。
由于该算法采用平面点重建图像的三维空间坐标,要求解的方程的未知数减少(由12个减少到8个),计算较DLT算法简单,且易编程实现。
2 双平面标定框架设计
双平面标定框架采取折叠和收缩设计,标定框架主体结构采取轻质镁合金,框架两垂直面的穿球杆采取上下交错设计,两垂直面上的标定球涂成两种不同色彩且排列规则。
2.1 标定框架主要套件及功能
(1) 90°定位杆转套(见图1中1)。定位杆可来回旋转,框架折叠时可将定位杆旋至与穿球杆平行。
(2) 90°定位杆接头套(见图1中2)。可来回滑动,使连杆分开和连接。定位杆控制一定长度,保证两平面相互垂直。
(3) 凸轮夹与内置定位销(见图1中3)。凸轮夹可快速锁紧和放松,便于快速拆装框架。主干拆装处用定位销定位,保证精度。
(4) 方向标定杆(见图1中4)。方向标定杆可在水平方向360°旋转,方便坐标变换。
(5) 合叶(见图1中5)。便于框架两平面折叠。

图1 双平面标定框架工程图
2.2 双平面标定框架优点
目前,在国内广泛使用的是放射状框架,与放射状框架相比,双平面框架具有携带方便,操作简便,不遮挡,易识别等优点。
(1) 携带方便。放射状框架收好后需要两个比较大的长方形箱子和一个用来装基架的袋子,携带困难。双平面框架两个相互垂直的标定面采取可折叠的设计,收好后大小和一个普通的手提箱相差无几,无论是平常携带还是进入比赛现场都非常方便。
(2) 操作简便。放射状框架需要将9根标杆按照对应顺序一一固定在标定基架上。双平面框架由于安装了90°定位杆转套、90°定位杆接头套、凸轮夹与内置定位销等套件,便于框架的折叠和快速拆装,并能保
证精度。
(3) 不遮挡,易识别。当摄像机角度不合适时,放射性框架就会出现标定杆相互遮挡的问题,在固定好标定框架后还需要在纸上画出标定杆的顺序草图用于标定球的识别。双平面框架两垂直面的穿球杆采取上下交错设计,因此不存在标定球间的遮挡问题。两垂直面上标定球采用不同颜色并且排列规则,便于标定球的识别。
(4) 便于三维空间坐标变换。方向标定杆可在水平方向上360°转动,通过矢量夹角运算,可以方便地进行三维空间坐标变换。
3 双平面框架精度分析
3.1 框架精度分析实验设计
以双平面框架为研究对象,应用三维摄像测量原理,两台JVC9800摄像机(拍摄频率50 Hz)A、B分别放置于如图2所示位置,使A、B两摄像机主光轴的连线到拍摄区域分别为15.6 m和16.4 m,机高1.15 m。分别在拍摄区域放置双平面框架、标杆长740.0 mm,进行拍摄。实验测试图如图2所示。

图2 框架精度验证测试图
3.2 框架精度分析实验结果
线性方程解出的摄像机参数如表1所示。
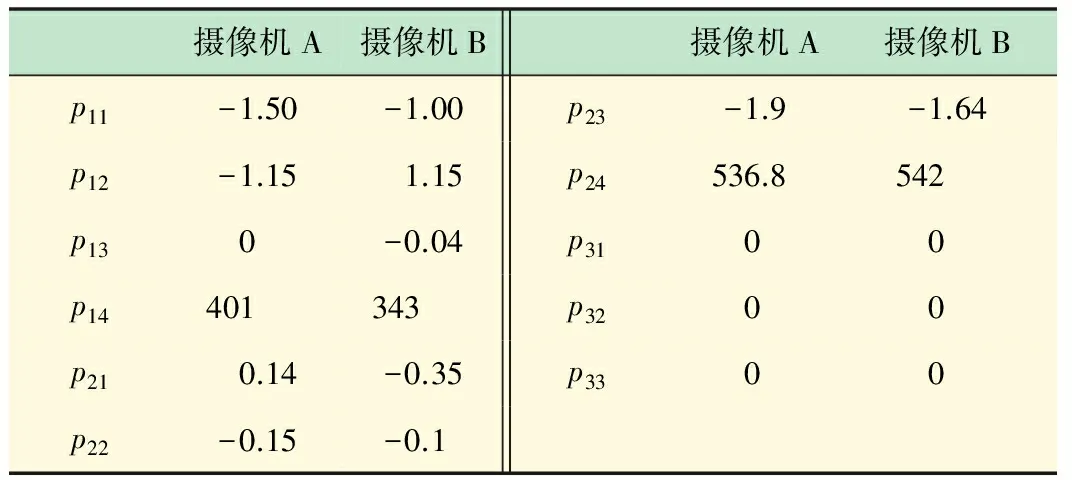
表1 线性方程解出的摄像机参数
经双平面框架标定及三维重构后得到的标杆长度实际值、标杆长度计算值和相对误差数据见表2。从实验数据可看出,研制的双平面标定框架在三维测量中相对误差小于5%,能够满足人体运动参数测量的需要。

表2 框架精度分析试验数据
4 结 语
研制了在实际测量中简单易行的双平面标定框架。基于DLT算法提出了一种适合双平面标定框架的标定算法,计算较DLT算法简单,且易编程实现。研制的双平面标定框架在三维测量中相对误差小于5%,能够满足人体运动学参数测量的需要。
[1] 蔡云飞 .人体运动三维仿真与分析系统[D].天津:河北工业大学,2004.
[2] Song L M,Wang M P,Lu L,etal. High precision camera calibration in vision measurement [J]. Optics & Laser Technology,2007,39(7):1413-1420.
[3] 徐 艳,袁同春,柴业宏. 基于三维图像解析的篮球投篮技术生物力学分析[J]. 合肥工业大学学报(自然科学版 ),2012,35(10):1428-1431.
XU Yan, YUAN Tong-chun, CHAI Ye-hong. Biodynamic analysis of basketball shooting skills based on 3-D view analysis[J]. Journal of Hefei University of Technology, 2012, 35(10): 1428-1431.
[4] 敬龙军,王 鹏. 中外优秀 20 km 竞走运动员髋关节运动特征的三维运动学分析[J]. 北京体育大学学报, 2012,35(10): 122-126.
JING Long-jun,WANG Peng. 3-Dimensional kinematics analysis of hip joint motion characteristics of 20 km walking race athletes at home and abroad[J]. Journal of Beijing Sport University, 2012,35(10): 122-126.
[5] 霍洪峰,赵焕彬,叶 静,等.中国运动生物力学研究发展现状及发展趋势[J].中国体育科技, 2009,45(3): 84-86.
HUO Hong-feng,ZHAO Huan-bin,YE Jing,etal. The current situation and developing trend of sports biomechanics in China[J]. China Sport Science and Technology, 2009,45(3): 84-86.
[6] 隋新梅.张峻旋转推铅球过渡阶段主要关节角度变化特征分析[J].体育科研,2012,33(3):81-84.
SUI Xin-mei. Analysis of the variation characteristics of the main joint angles in the transition phase of Zhang Jun’s spinning shot put[J]. Sport Science Research, 2012,33(3):81-84.
[7] 文世林.我国两名优秀男子铅球运动员旋转推铅球技术的三维运动学分析[D].北京:首都体育学院,2009.
[8] 周长涛. 男子跆拳道高水平运动员下劈技术动作三维运动学特征研究[J].山东体育学院学报,2012,28(2):79-84.
ZHOU Chang-tao. Three dimensional kinematic features of men’s taekwondo athletes’ axe kick[J]. Journal of Shandong Institute of Physical Education and Sports,2012, 28(2): 79-84.
[9] 毛剑飞,邹细勇.改进的平面模板两步法标定摄像机[J].中国图象图形学报,2004,9(7): 846-852.
MAO Jian-fei, ZOU Xi-yong. Improved two-stages camera calibration from a plane[J]. Journal of Image and Graphics,2004,9(7): 846-852.
[10] 李中伟,王从军,史玉升. 3D 测量系统中的高精度摄像机标定算法[J]. 光电工程, 2008, 35(4): 58-63.
LI Zhong-wei,WANG Cong-jun,SHI Yu-sheng. High precision camera calibration algorithm for 3D measurement system[J]. Opto-Electronic Engineering, 2008, 35(4): 58-63.
[11] 陈 召,柏开祥,康 帆. 三维摄影框架的设计、 标定、 检验与应用研究[J]. 武汉体育学院学报,2013,47(1):65-69.
CHEN Zhao, BAI Kai-xiang, KANG Fan. Design, marking, checking and utilizing of 3D photography frame[J]. Journal of Wuhan Institute of Physical Education,2013,47(1):65-69.
[12] 余 峰.基于图像的三维造型算法研究[D].杭州:浙江大学,2004.
[13] John H, Challis, David G, Kerwin. Accuracy assessment and control point configuration when using the DLT for photogrammetry[J]. J Biomechanics, 1992, 35(9): 1053-1058.
[14] 杨年峰, 王季军, 黄昌华,等. DLT算法中象平面误差对三维重构的影响[J]. 中国生物医学工程学报,2000,19(2):121-129.
Yang Nian-feng, Wang Ji-jun, Huang Chang-hua,etal. The influences of image coordinate errors on the accuracy of 3-D coordinate reconstruction in DLT algorithm[J]. Chinese Journal of Biomedical Engineering,2000,19(2):121-129.
[15] 郑秀瑗. 现代运动生物力学[M]. 北京:国防工业出版社, 2007:13-24.
猜你喜欢
今日农业(2021年19期)2022-01-12 06:17:00
空间科学学报(2020年1期)2021-01-14 00:53:20
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中国公共安全(2017年8期)2017-10-13 08:12:17
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
成都信息工程大学学报(2017年6期)2017-03-16 03:04:30
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
光学精密工程(2016年3期)2016-11-07 09:03:34
中国光学(2015年5期)2015-12-09 09:00:46