
采用图像匹配技术的弹目攻击姿态分析方法
2014-02-02 06:17:45刘娟,张健,任波
沈阳理工大学学报 2014年3期
刘 娟,张 健,任 波
(沈阳理工大学 装备工程学院,辽宁 沈阳 110159)
近程防空导弹是对战役战术目标进行攻击,其射程通常在40千米以内[1-2]。在近程防空导弹末端制导中快速识别出目标,并根据目标的姿态参数确定导弹攻击的姿态,对提高毁伤效果十分重要。
目前,国内外研究者对近程防空导弹技术做了大量的研究。但就近距离弹目交会下的末端制导问题,国外由于技术保密的问题,没有见到详细的研究报道。本文主要就近距离导弹末端制导情况展开研究,为近程防空导弹准确攻击目标提供技术支持。
文中重点研究近程防空导弹拦截飞行速度低于亚音速的飞行器目标(如巡航导弹、武装直升机等)时,利用弹载激光成像系统实时获取数张目标图像,经过阵列DSP图像匹配技术处理,快速识别目标,利用弹目之间特征点的几何关系求解目标姿态,以此确定接近最佳炸点的引爆方向。
1 弹目攻击姿态分析系统模型
弹目攻击姿态分析系统组成如图1所示。

图1 弹目攻击姿态系统组成
系统主要由6个处理单元组成,其中弹载激光成像系统构成弹目攻击姿态的前视目标探测装置。弹载激光成像系统近距离(如3000米)实时拍摄完整目标图像后,将图像输送到阵列DSP信息处理模块。信息处理模块利用阵列DSP进行并行图像处理,此方案中采用4个DSP核进行图像信息处理。当第n幅图片经过图像预处理进入特征点提取模块(DSP2)时,第n+1幅图片在同一时间进入图像预处理模块(DSP1),……依次类推,形成流水式的阵列DSP并行处理结构,实现姿态参数解算的实时性。
2 图像匹配算法及仿真
由于本文重点研究近程防空导弹近距离拦截低亚音速飞行目标,短时间内飞行器的运行轨迹可近似为平行移动并带少许转动,因此采用比例导引法可得目标图像如图2所示。

图2 目标原图
2.1 图像预处理
由于成像环境是多变的,弹载激光成像系统输出的图像总伴有模糊、明暗度、噪声等干扰问题,因此在对图像特征提取前进行图像预处理是非常必要的。图像预处理主要包括几何修正、图像除噪、图像增强、均值滤波、中值滤波、阈值分割等,因中值滤波除噪能力强且除噪后图像清晰明亮而被广泛应用,文中采用中值滤波,其仿真结果如图3所示。

图3 图像预处理
2.2 特征点提取
图像特征点提取一般分为基于图像边缘和基于图像灰度的两种方式[3]。基于图像灰度的特征点提取算法一般有Harris算子、Moravec算子、SUSAN算子和SIFT算子。
本文利用Harris算子进行图像特征点提取仿真结果如图4所示。

图4 特征点提取
2.3 图像匹配
图像匹配[4]是指把不同敏感器或同一敏感器在不同时间、不同成像条件下对同一景物获取的两幅图像在空间上对准,或根据已知模式到另一幅图像中寻找相应的模式。阵列DSP图像匹配过程如图5所示。
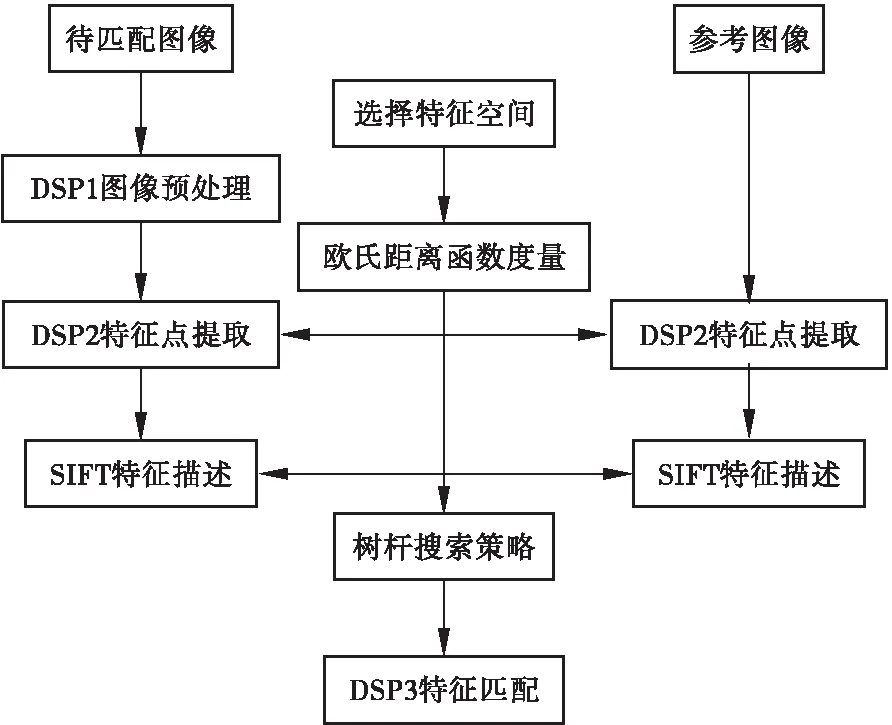
图5 图像匹配
SIFT算法的内容主要包括:创建尺度空间、极值点检测、特征点精确定位、确定特征点主方向和生成特征描述子。采用上述图像匹配流程进行SIFT图像匹配仿真结果如图6所示。

图6 图像匹配
3 图像姿态计算
3.1 姿态特征点的选取
利用匹配成功后的图像计算图像的姿态,理论上讲,只要获取图像3个以上的特征点就能计算出图像的姿态,本文以飞机目标为例,选取机头、机尾和飞机的重心三个特征点。首先对匹配后的飞机图像进行预处理,得到二值化图像,在此基础上利用重心计算公式得到飞机的重心坐标g(xg,yg)。
重心计算公式:

(1)
(2)
式中I(x,y)是图像函数,当(x,y)∈R时,I(x,y)=1,否则I(x,y)=0。
由重心开始向四周做直线,到重心距离最短的设为机头,其坐标为a(x1,y1),由a和g连接的直线向机尾延伸搜索,得到与重心g距离最远的设为机尾点b(x2,y2),这样在目标上找到了重心、机头和机尾三个特征点。三个特征点选取结果如图7所示。
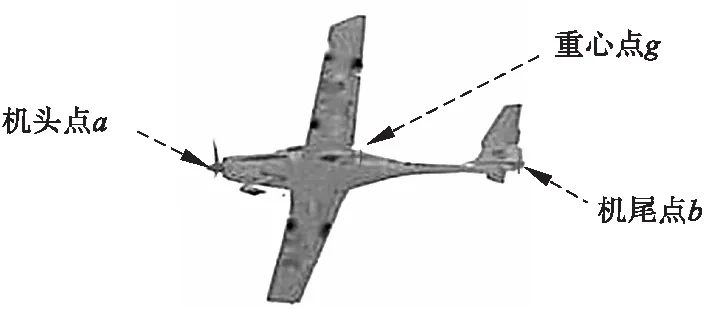
图7 三个特征点
3.2 弹目姿态透视投影模型
透视投影模型[5]如图8所示。

图8 透视投影

3.3 目标姿态角的计算
目标的三个空间特征点分别是重心G(XG,YG,ZG)机头A(X1,Y1,Z1),机尾B(X2,Y2,Z2),这三个特征点的投射投影点分别为g(xg,yg),a(x1,y1),b(x2,y2),如图9所示。

图9 投影坐标系
已知量分别为机型长度,g、a、b的坐标已知,G到A的距离设为M,G到B的距离设为N,M和N也是已知的,过G点做像平面c的平行平面C1,投影线oa交面C1于A1,ob交面C1于B1,设∠OA1B1=α,∠OB1A1=β,∠A1OB1=γ,∠OAB=θ,∠OBA=ψ,k=ZG/f,GA=M,GB=N,ga=m,gb=n,GA1=km,GB1=kn,AB=M+N,α、β、γ可由三角形Oab的正弦、余弦定理求的,由目标姿态角的计算方法得
(3)
sin2γ=sin2θ+sin2ψ-2sinθsinψcosγ
(4)
k=sinγ/
(5)
XT=xt×k,YT=yt×k,ZT=k×ft
(6)
(7)
X1=x1×k,Y1=y1×k
(8)
利用计算机图形学理论对目标坐标系进行坐标变换,设GA为物体坐标系的x轴,z轴与物体坐标系的平面垂直,方向垂直向下,将G点进行平移,与O点重合,则特征点A、B两点在新物理坐标系下的坐标为A(X11,Y11,Z11),B(X22,Y22,Z22),即
X11=X1-XT,Y11=Y1-YT,Z11=Z1-ZT,X22=X2-XT,Y22=Y2-YT,Z22=Z2-ZT
(9)

3.4 目标相对地面坐标系的姿态角
3.3已求得目标相对弹载摄像机的姿态角,要求出目标相对地面坐标系的姿态角,则要把摄像机坐标系转换到地面坐标系。设由导弹自身的陀螺仪测得的导弹相对地面的姿态角分别是:俯仰角λ,偏航角μ。摄像机坐标系绕X轴顺时针旋转的角度为α(α=λ+π/2),绕Z轴逆时针旋转的角度为β(β=μ),由坐标变换得摄像机向地面坐标系的转换矩阵为L,
(10)
机身的单位向量在摄像机坐标系下的坐标为
(X,Y,Z)T=(cosφcosω,sinφcosω,sinω)T
(11)
则坐标转换后在地面坐标系下的坐标为
(x,y,z)T=(cosφcosω,sinφcosω,sinω)T
(12)
飞机的俯仰角
(13)
偏航角
φ1=arctan(y/x)
(14)
4 姿态调整仿真分析
导弹远处攻击时,可以有足够的时间做姿态调整,使其达到攻击目标的最佳位置;但近距离攻击时,因没有足够的时间调整,不足以对目标造成最大的毁伤;然而,此时短时间内如果根据目标姿态信息确定引爆点的引爆方向,使引爆方向与目标飞行方向之间的夹角尽可能接近90度,则仍可达到最大毁伤目的,弥补了前者的不足之处。
在弹目近距离交会下的战斗部中预设多个定向引爆点,根据弹目交会姿态轨迹求出引爆点与目标之间的夹角,得出夹角接近90度的引爆点,便可提高对目标的毁伤效果,如图10所示。
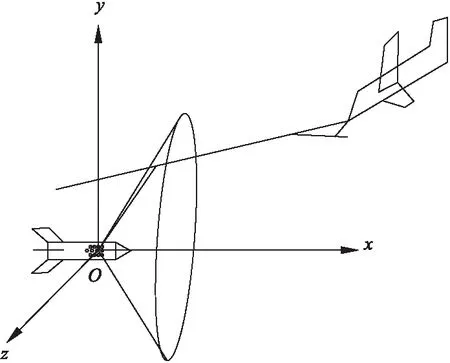
图10 弹目交会
本文首先采用“小山法”在Matlab平台上做出弹目交会轨迹,再在TMS320C6678多核DSP和EVM仿真环境下进行近程防空导弹拦截目标三维仿真,其结果如图11所示。
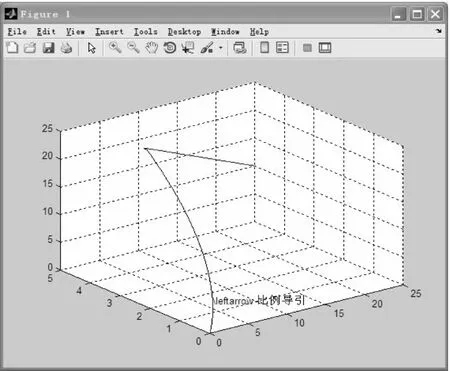
图11 仿真结果
由弹目交会轨迹可计算出导弹战斗部各个引爆点与目标之间的夹角,部分设置的引爆点与飞行器飞行方向的夹角结果如表1所示。

表1 仿真基本参数
由表1可得引爆点3、6便是接近最佳炸点的引爆点,近程防空导弹点燃该引爆点,便可对目标造成极大的毁伤效果。
5 结束语
论述了一种基于阵列DSP的图像匹配技术分析弹目攻击姿态、确定最佳引爆方向的具体方法。该方法充分利用弹载激光成像系统提供的大量目标图像信息,采用阵列DSP并行处理平台,能准确的识别目标,确定目标的飞行姿态,继而采用小山法得出弹目交会轨迹,确定最佳引爆点,以便对目标造成更有效威胁,提高毁伤效果。由于图像包含的信息量多,在对图像做一些预处理、特征匹配、姿态角计算等方面会花费大量的时间,如何在阵列DSP的设计中合理利用所有的DSP核进行数据处理将是进一步研究的关键。
[1] Kim M,Grider KV.Terminal guidance for impact attitude angle constrained flight rejectories [J].IEEE Transactions on Aerospace and Electronic Systems,1973,9 (6):852-859.
[2] 张意,马清华.反坦克导弹近距离顶攻弹道设[J],弹箭与制导学报,2010,30(2):187-189.
[3] 王红梅,张科,李言俊.图像匹配研究进展[J].计算机工程与应用,2004,20(19):42-47.
[4] 王继方,王向军,张世海.一种基于目标特征点的姿态角测量方法[J].宇航计测技术,2008,28(2):71-72.
[5] 杨丽梅,郭立红,曹西征.单站光测图像确定空间目标三维姿态方法综述[J].微计算机信息,2006(5):186-188.
猜你喜欢
舰船电子工程(2023年8期)2023-11-15 06:51:08
舰船电子对抗(2020年5期)2020-11-26 10:53:58
上海航天(2019年1期)2019-04-03 02:32:58
指挥控制与仿真(2018年1期)2018-03-19 07:45:03
计算机测量与控制(2017年6期)2017-07-01 16:23:31
兵器装备工程学报(2017年4期)2017-04-28 01:12:28
制导与引信(2015年3期)2015-04-20 00:44:22
集美大学学报(自然科学版)(2015年1期)2015-02-28 01:13:32
弹道学报(2014年1期)2014-12-26 06:33:32
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:46
