自适应模板匹配在自主空中加油跟踪中的应用
2014-01-21 00:52:22杜立一程咏梅公续平赵建涛
电子设计工程 2014年20期
杜立一,程咏梅,公续平,赵建涛
(西北工业大学 自动化学院,陕西 西安 710129)
自主空中加油技术是未来空中加油技术的发展趋势。我国采用的空中加油方式为插头锥套式(又称软管式),该方式主要依靠受油机的操纵来完成加油,在近距离加油对接时(一般在100 m以内),加油机必须精确跟踪受油机锥套。传统的GPS和惯性导航方法以及二者的组合,一般用于较远距离的导航中。在近距离加油对接阶段,由于GPS信号易受干扰、惯性导航存在漂移等问题,很难实现精确跟踪[1]。而视觉系统广泛用于近距离的高精度跟踪中,视觉跟踪方法为这一问题提供了可行的解决方案。
由于受环境的影响,锥套在受油机前视镜头的成像中会出现无规律运动,因此,如何不断地锁定跟踪锥套,便成为受油机与锥套成功对接的关键。现有的目标检测算法主要有背景差分法、帧间差分法、阈值分割法、模板匹配法、光流法等。鉴于锥套所成的像为圆形,并且背景有飞机的干扰,所以文中提出一种简单实用的模板匹配算法,对目标进行实时的锁定。同时由于在图像匹配过程中,图像背景较为复杂,故在此采用归一化相关匹配算法(NCC)[3-5]。之所以选择归一化相关匹配算法,是因为它稳定性好,跟踪精度高,而且抗干扰能力较好。同时,传统的归一化相关匹配的算法,是将模板在整幅图像中平移,对每一个象素点都匹配一次,计算相似度,这就导致很大的计算量,一定程度上影响了图像跟踪的实时性。所有关文献提到利用基于金字塔数据结构的搜索方法[3]。为了简便,本文通过拟合目标的运动轨迹来缩小搜索范围[6]。通过实验仿真,可以看出,本文的算法是切实可行的。
1 自适应模板匹配跟踪
算法流程如图1所示。

图1 算法流程图Fig.1 Algorithm flowchart
1.1 初始目标确定
首先从视频中读取第一帧图像,确定初始目标,即初始模板。由于图像中背景较复杂,首先需要对图像进行图像预处理处理。首先进行中值滤波,去除图像中的椒盐噪声等噪声,然后再对处理后的图像进行数学形态学处理,数学形态学有4种基本运算:膨胀、腐蚀、开运算和闭运算[2]。其中,膨胀运算与腐蚀运算分别使对象区域变大与变小;开运算消除细小物体、在纤细点处分离物体和平滑较大的边界并不明显改变其面积;闭运算填充物体内部细小空洞、连接邻近物体、平滑其边界、并不明显改变对象区域面积。二值化后的图像,会存在许多小的孤立点,这是由噪声引起的,因此可以运用开运算来滤掉这些孤立的小范围噪声点。飞机在空中加油时,图像中会有云朵,一般情况下处在图像边缘,故再消除边缘噪声。去噪后,利用轮廓跟踪的方法对目标进行分割,进而确定模板大小,从而在原图中提取初始目标模板。
1.2 归一化相关匹配
归一化相关算法的定义如下:
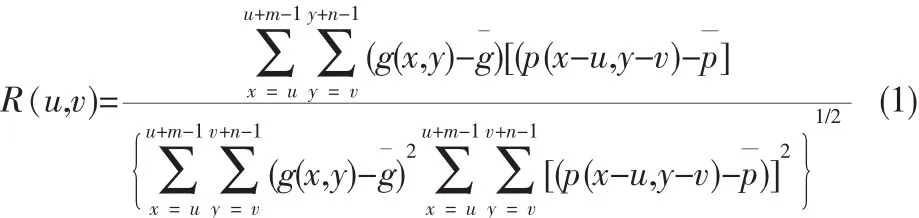
其中,g为视频中待匹配的每帧图像,大小为M×N;p为模板,大小为 m×n;p¯为模板的平均灰度值;(u,v)是匹配点坐标;g是g中对应模板的区域的平均灰度值。
归一化相关算法(NCC)对图像和模板进行了去均值处理,使函数R(u,v)的峰值尽量锐化,并且归一化相关算法(NCC)能抑制噪声,对所匹配图像亮度的变化和对比度的变化不敏感,当相对的放大或缩小、旋转和突变不大时,也能够达到比较好的匹配效果。尽管归一化相关算法(NCC)有很多优点,但是由于其运算量较大,这就导致此算法在匹配过程中没有较好的实时性。为了充分利用归一化相关算法(NCC)的稳定性好、跟踪精度高、抗干扰能力较好等优点,同时满足目标跟踪中实时性的要求,下面我们将从缩小搜索范围这方面考虑,进行实验。减少大量的运算时间,保证。
1.3 跟踪目标搜索范围
通过计算视频中每一帧跟踪目标在图像中的位置,然后利用视频中连续几帧图像之间的跟踪目标的位置,这样就可以得到跟踪目标在图像中的运动轨迹,从而利用目标前几帧得到的的运动轨迹来预测跟踪目标在下一帧可能出现的位置,然后在该位置附近进行相关匹配运算,这样就减小了搜索范围即减少搜索次数,从而减少了大量的运算,故提高了模板匹配的速度。在此,我们采用了多项式为拟合函数[6],根据跟踪目标在最近前3帧的位置,拟合得到跟踪目标的运动轨迹,从而预测下一刻的跟踪目标的位置。由于前后两帧之间位置变化比较缓慢,所以下一帧的搜索范围可设定在以预测位置为中心,比模板大两到三倍的区域进行搜索[7],这样,可以节省大量时间,并能提高搜索准确度。
1.4 模板更新
由于跟踪目标在匹配跟踪过程中,其大小、形状都会出现变化,并且还可能会受到遮挡,故,这就导致固定模板的匹配跟踪容易跟丢目标,从而,在前面的归一化相关算法(NCC)中,我们设定好相似度阈值,若超过阈值范围,则进行模板更新。在此过程中,若更新速度过慢,则可能导致跟不上跟踪目标;若更新过于频繁,容易使匹配误差不断地积累,从而导致跟踪窗口的漂移,进而导致跟踪失败。针对这些问题,在此,用匹配最佳图像与模板的相似度(即相关性)作为参考值构造模板更新评价函数,然后用这个评价函数来判断模板是否更新,若需要更新,则重复前面的目标检测过程。
在得到第k和k+1帧的归一化相关值Rk和Rk+1后,构造模板评价函数:

其中,0≤Rk≤1且 0≤Rk+1≤1。模板更新评价函数是计算上一次最佳相似度与本次最佳相似度的差值△Rk,而△Rk只有落在某一范围内的时候才更新模板,即:

当△Rk≤r1时,当前目标与模板匹配得很好,此时目标几乎没变化,没必要更新模板;当r2≤△Rk时,当前目标与模板比较,有较大形变,目标被遮挡,不更新模板,以免跟错或被遮挡。r1和r2是通过大量实验获得的经验阈值。在获得r1和r2的过程中,选取的规则为:若r1过大,目标变形很大时,匹配精度很低;若r1过小,则导致模板更新频繁,可能在某一帧跳跃时造成较大误差。
当视频中某帧图像满足模板更新的条件时,首先重复前面过程,在图像中构造新模板,然后进行目标跟踪。
2 仿真实验
为验证本文算法的性能,我们进行了大量实验并与常用的固定模板匹配方法进行比较,比较结果如表1所示。本文在Internet上下载美国于2012年5月成功进行的 “全球鹰”无人机自主空中加油实验的视频,进行跟踪测试。测试中使用的PC机配置为:core(TM)i3-2010+3.3 G,2.0 G内存;软件平台为:Windows XP操作系统,MATLAB2013环境。

表1 实验结果比较Tab.1 Comparison of experimental results
图2显示了初始目标的确定过程:首先对图像进行直方图均衡化,使图像增强,然后二值化,接着就能行形态学滤波,最后得到初始目标。
当受油机接近加油机锥套时,锥套在相机中成的像由小变大,有时还会被遮挡,在此种情景下,对视频进行模板匹配跟踪,结果如图3所示,其中用粗虚线框将匹配目标标出来。
从实验结果中,可以看出,开始阶段,锥套在较远处时较小,然后逐渐变大,同时更新匹配模板,从而准确跟踪目标,当目标部分遮挡时,本算法也能准确跟踪目标。同时,由于引进轨迹跟踪,从而缩小了模板的搜索范围,从而保证了跟踪的实时性。
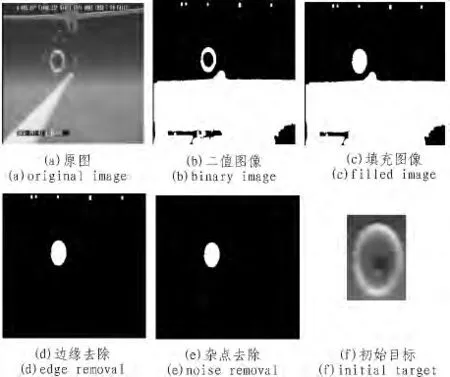
图2 初始目标确定过程Fig.2 The process of determining the initial target

图3 匹配跟踪结果Fig.3 Results of matching tracking
3 结束语
实验结果及分析表明,文中提出的自适应模板匹配法较好地排除了孤立点和边缘大片阴影噪声的干扰,准确提取出要匹配的模板;利用归一化相关匹配算法,跟踪精度高,稳定性好,并具有良好的抗干扰性能;同时利用归一化相关值判断是否对模板进行更新,从而获得了自适应的模板,保证在目标大小,光线变化时,能准确跟踪目标;运用轨迹跟踪,缩小模板搜索范围,大大缩短了运算时间;对目标的定位准确,具有良好的自适应性。最后的实验结果表明,本文提出的自适应模板匹配算法满足自主空中加油图像跟踪中的要求。
[1]Roshawn Elizabeth Bowers.Estimation Algorithm For Autonomous Aerial Refueling Using A Vision Based Relative Navigation System[D].Submitted to the Office of Graduate Studies of Texas A&M University,2005.
[2]Rafael C.Gonzalez,Richard E.Woods,Steven L.Eddins.Digital Image Processing Using MATLAB[M].北京:电子工业出版社,2003.
[3]徐瑞鑫,刘伟宁.基于自适应模板的实时跟踪算法[J].光学精密工程,2002,10(4):365-369.XU Rui-xin,LIU Wei-ning.Adaptive model-based real time tracking algorithm[J].Optics and Precision Engineering,2002,10(4):365-369.
[4]郝志成,朱明,刘微.复杂背景下目标的快速提取与跟踪[J].吉林大学学报:工学版,2006,36(2):259-263.HAO Zhi-cheng,ZHU Ming,LIU Wei.Fast extracting and tracking of target in complex environment[J].Journal of Jilin University:Engineering and Technology Edition,2006,36(2):259-263.
[5]罗诗途,罗飞路,王燕玲.基于自适应模板修正的相关跟踪方法[J].仪器仪表学报,2004,25(4):633-635.LUO Shi-tu,ZHANG Qi,LUO Fei-lu,WANG Yan-ling.Correlation Tracking Method Based on Adaptive Modal Modification[J].Chinese Journal of Scientific Instrument,2004,25(4):633-635.
[6]贾桂敏,王向军,张世海.复杂背景下基于自适应模板更新的目标跟踪算法[J].光学学报,2009,29(3):659-663.JIA Gui-min,WANG Xian-jun,ZHANG Shi-hai.Target tracking algorithm based on adaptive template update in complex background[J].Acta 0ptica Sinica,2009,29(3):659-663.
[7]肖笑.基于BCC算法的多机系统PSS参数优化设计[J].陕西电力,2012(12):51-54.XIAO Xiao.Optimal design of multi-machine power system stabilizer parameters based on bacterial colony chemotaxis algorithm[J].Shaanxi Electric Power,2012(12):51-54.
猜你喜欢
河北农机(2021年12期)2022-01-06 01:21:42
小型微型计算机系统(2021年4期)2021-04-12 09:50:54
科学技术与工程(2020年4期)2020-04-08 08:19:34
计算机应用(2017年4期)2017-06-27 08:10:42
计算机应用与软件(2016年11期)2016-12-26 08:33:20
飞行力学(2015年3期)2015-12-28 08:38:18
电视技术(2015年5期)2015-06-22 14:40:00
航空世界(2014年7期)2014-09-24 19:29:08
飞行力学(2014年4期)2014-09-15 07:49:32
电子设计工程(2014年18期)2014-02-27 12:00:19