20辊森吉米尔轧机辊系运动学分析与计算
2014-01-15 09:33:52陈洁
湖北工业大学学报 2014年4期
陈 洁
(中冶南方工程技术有限公司技术研究院,湖北 武汉430223)
20辊森吉米尔轧机是高精度轧制核心设备之一,具有道次压下率大、轧制力小、运行成本低、辊系变形小等特点,应用十分广泛。森吉米尔轧机具有多种调整机构。在轧制过程中,通过手动或自动控制系统,获得高精度的、板形优良的成品带材[1]。本文以某森吉米尔轧机辊系为研究对象,对辊系进行运动学分析,并计算出轧机调整关系曲线,为板带轧制工艺优化、板型调整提供参考。
1 辊系结构分析
20辊森吉米尔轧机的辊系呈塔形布置(图1)于机架梅花膛孔内,上下对称。工作辊S、T分别支撑在两个第一中间辊O、P、Q、R上;第一中间辊又分别支撑在第二中间辊I、J、K、N、M、L上;第二中间辊则靠8个支撑辊A、B、C、D、E、F、G、H 来支撑。每个支撑辊由数个背衬轴承和鞍座安装在同一根轴上。其中A、D、E、H为轧机的侧偏心补偿辊,用于轧辊磨损后的辊径补偿;B、C为轧机压下及AS-U-ROLL调整辊,用于压下调整及凸度调节;F、G则为轧制线标高调整辊,保证带钢始终处于轧制线上。8根支撑辊的轴心与机架梅花孔心均存在一定的偏心量,通过旋转支撑辊的偏心,使支撑辊芯轴产生一定的位移,从而实现轧辊相对位置的调整。这种控制调整具有快速、准确等优点,保证带钢的轧制精度要求。
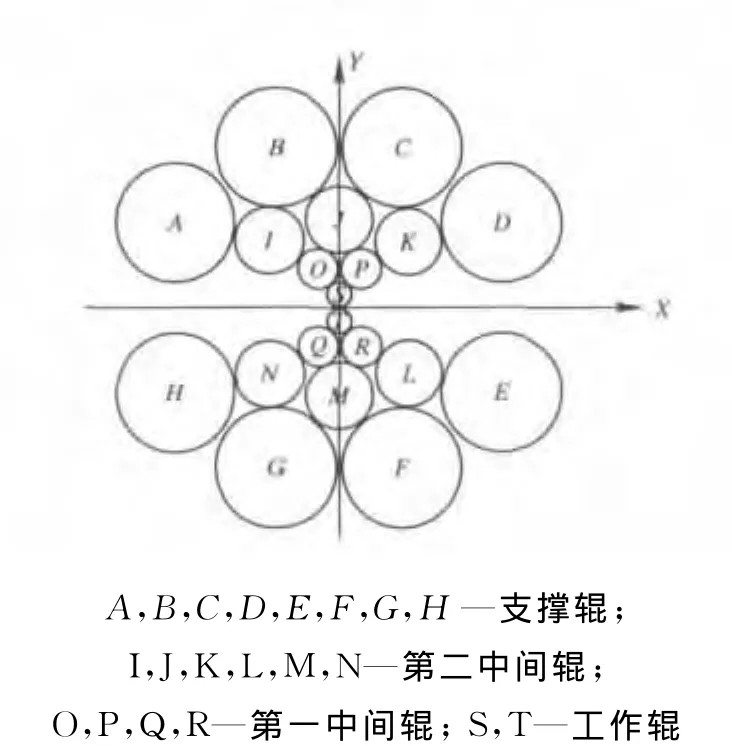
图1 20辊森吉米尔轧机辊系图
工作辊之间、第一中间辊彼此之间、第二中间辊彼此之间以及支撑辊彼此之间不能接触。第二中间辊I、K、N、L为传动辊,其余各辊靠辊间摩擦力转动。辊系参数如表1所示。
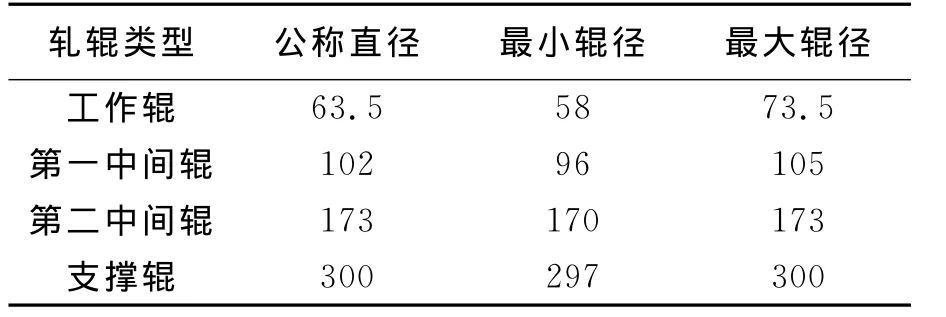
表1 20辊森吉米尔轧机辊系参数 mm
2 辊系运动学模型
将辊系简化成杆系,连杆两端点分别为轧辊的辊心,连杆长度即为两轧辊半径之和[2]。由于该轧机辊系为平面对称分布,可取其1/4进行分析;根据约束条件,将二中间辊J和工作辊S圆心处简化为滑块机构。根据辊系简化图(图2),可得辊系运动学分析向量图(图3a)和标量图(图3b),图3b中r1~r13为图3a中各向量的长度,θ1~θ13为这些向量的角度。
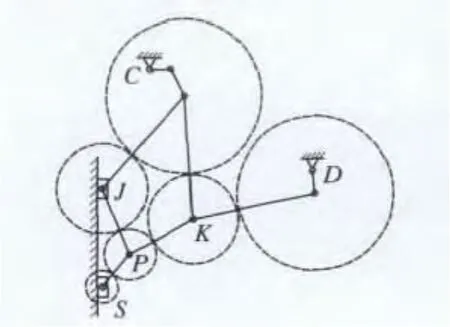
图2 20辊轧机辊系简化图
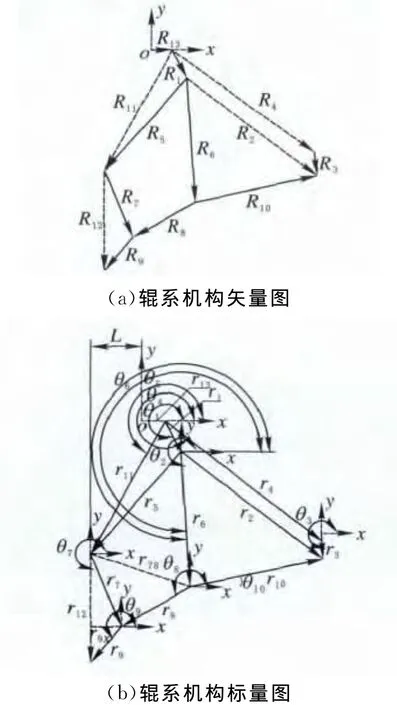
图3 辊系运动学分析
以C辊鞍座环中心为坐标原点,由图3b可得闭环矢量方程[3]

将式(1)转化为标量形式

因为支撑辊C辊和D辊鞍座环的圆心坐标已知,且r13=1.016,θ13=0,因此r4和θ4可求出。又已知r1=6.35,r3=3.175,若给定θ1和θ3,即由式(2)求出r2和θ2。
同理,由图3b可得闭环矢量方程

将式(3)转化为标量形式

根据辊系左右对称的特性,J辊辊心必须在机架垂直中心线上。令L为支撑辊C辊鞍座环中心与机架垂直中心线的距离,因此r1cosθ1+r5cosθ5=L+r13。已知L=149.225和r5,则θ5可求出。因此r11和θ11可求出。即第二中间辊惰辊J辊的辊心坐标可求。
由图3b 可得闭环矢量方程

将式(5)转化为标量形式

已知r2、r6、r10及θ2,利用牛顿-辛普森法,可求出θ6和θ10。即第二中间辊传动辊K辊的辊心坐标可求。
由图3b可得闭环矢量方程

将式(7)转化为标量形式

已知r5、r7、r6、r8及θ5、θ6,利用牛顿-辛普森法,可求出θ7和θ8,即第一中间辊P辊的辊心坐标可求。
最后,由图3b可得闭环矢量方程

将式(9)转化为标量形式

已知r7、r9及θ7、θ12(θ12=270°),利用牛顿-辛普森法,可求出r12和θ9。即上工作辊S辊的辊心坐标已求出。
3 轧机调整关系曲线
3.1 压下调整
森吉米尔轧机的压下,是通过压下齿条驱动两个上部支撑辊组B及C的内偏心环转动来实现的,即通过图3a中向量R1的转动,从而实现上工作辊的压下及抬起。将向量R1的角度θ1作为变量,可计算出压下齿条移动量与工作辊压下量的关系曲线(图4)。
以公称辊径为例,压下齿条行程为140mm,则工作辊最大压下量为6.087mm。
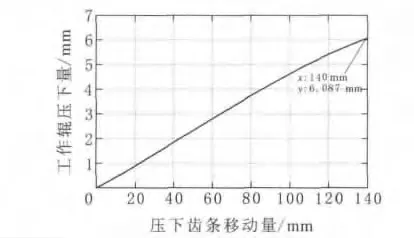
图4 压下齿条移动量与工作辊压下量关系
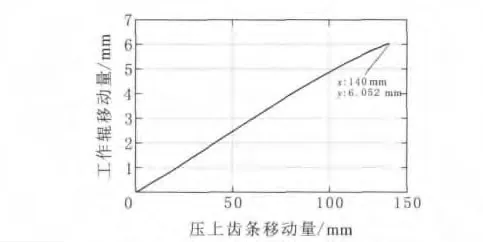
图5 凸度调节齿条移动量与工作辊凸度变化量关系
3.2 AS-U-ROLL调整
森吉米尔轧机的AS-U-ROLL调整,是通过凸度调节齿条驱动两个上部支撑辊组B及C的外偏心环转动来实现的,即通过图3a中向量R13的转动,从而实现上工作辊的凸度调整。将向量R13的角度θ13作为变量,可计算出凸度调节齿条移动量与工作辊凸度变化量的关系(图5)。以公称辊径为例,ASU-ROLL压下齿条行程为79mm,则工作辊最大弯辊量,即最大凸度变化量,为0.441mm。
3.3 压上调整
森吉米尔轧机的压上,是通过压上齿条驱动两个下部支撑辊组F及G的偏心环转动来实现的,即通过图3a中向量R1的转动,从而实现下工作辊的压上和下降。将向量R1的角度θ1作为变量,去掉向量R13,可计算出压上齿条移动量与工作辊压上量的关系(图6)。以公称辊径为例,压上齿条行程为140mm,则工作辊最大压上量为6.052mm。
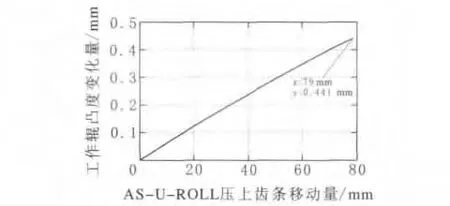
图6 压上齿条移动量与工作辊压上量的关系曲线
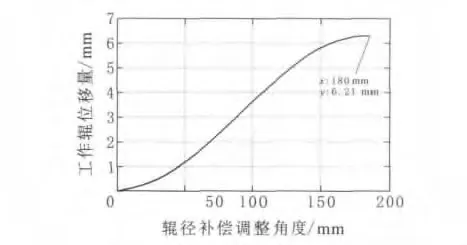
图7 辊径补偿调整角度与工作辊位移量的关系曲线
3.4 偏心调整
森吉米尔轧机的侧偏心补偿,是通过圆柱齿轮驱动两对支撑辊组A、H及D、E的偏心环转动来实现的,即通过图3a中向量R3的转动,从而实现上工作辊的压下及抬起。将向量R3的角度θ3作为变量,可计算出辊径补偿调整角度与工作辊位移量的关系(图7)。
4 结论
本文利用闭环矢量方程建立了某20辊森吉米尔轧机辊系的运动学分析模型,运用该模型对各辊辊心坐标进行求解,并对轧机各种调整结构与工作辊压下量的关系曲线进行求解,为实际生产中工艺方案的制定提供理论依据。所采用的方法简单明了,对分析类似结构的轧机具有借鉴意义。
[1] 潘纯久.二十辊轧机及高精度冷轧钢带生产[M].北京:冶金工业出版社,2003.
[2] 汪朝晖,严育才,张耀兵等.20辊森吉米尔轧机轧制过程中的辊系受力分析[J].华中科技大学学报(自然科学版),2013,41(02):18-21.
[3] John Gardner,机构动态仿真-使用 MATLAB和SIMULINK[M].西安:西安交通大学出版社,2002.
猜你喜欢
锻压装备与制造技术(2023年5期)2023-11-22 03:51:04
哈尔滨轴承(2022年1期)2022-05-23 13:12:58
冶金设备(2021年4期)2021-10-29 03:00:40
冶金设备(2021年1期)2021-06-09 09:35:16
中南大学学报(自然科学版)(2020年11期)2020-12-18 06:26:56
重型机械(2020年3期)2020-08-24 08:31:40
水运工程(2020年2期)2020-02-26 06:28:38
物流技术与应用(2019年6期)2019-07-16 08:14:52
水利科技与经济(2016年7期)2016-04-25 13:03:04
重型机械(2016年1期)2016-03-01 03:42:07