
低压大电流无刷直流电机驱动器设计
2014-01-13 10:19:28陈锦杰
微特电机 2014年2期
徐 刚,袁 文,陈锦杰
(中国电子科技集团公司第二十一研究所,上海200233)
0 引 言
通讯基站备用电源系统中的送风子系统采用一种低压大电流风机及驱动器,如图1 所示。风泵采用无刷直流电动机(以下简称BLDCM),其优势在于:BLDCM 结构简单(无电刷,转子为永磁体),运行可靠;拥有较高的功率密度,可以减小电机的在设备中的安装尺寸;类似于直流电机的控制方式,控制方法简单、易于实现。
图1 BLDCM 送风子系统安装机架
低压大电流驱动器的设计难点在于大电流流过电路时会产生很大的损耗,转换为热量造成驱动电路温度上升,给系统带来不稳定因素,并且温度过高会造成损坏。
因而,在做好驱动器温度监测和保护功能的同时,一般从降低逆变电路损耗和加强散热措施两个方面进行改进。具体可分为以下三个优化方向:采用具有更低导通阻抗的功率器件,减小功率器件在大电流工作状态下产生的导通损耗;PCB 设计和制造中热管理的优化和载流能力的提高,如采用ANDUS 公司的X-Cool SMT 技术;功率器件的散热设计[1]。
1 方案简介
1.1 BLDCM 驱动方法原理
本文采用了基于霍尔位置传感器的“6 拍换相二二导通”[2]的电机驱动方法,这种方法具有实现简单、成本低廉的优点。
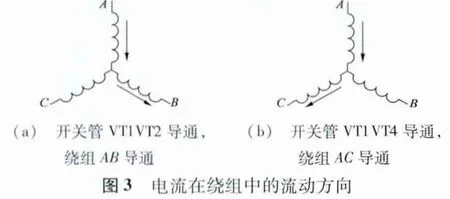
二二导通的方式是指任意导通逆变电路中两个开关管,如图2 所示。注意同一个桥臂的开关管不能同时导通,则共有六种状态:VT1VT2/VT1VT4/VT3VT0/VT3VT4/VT5VT0/VT5VT2,对应于六种绕组(三相BLDCM)状态AB/AC/BA/BC/CA/CB,如图3 所示。电流流经绕组在空间内形成6 个空间磁场
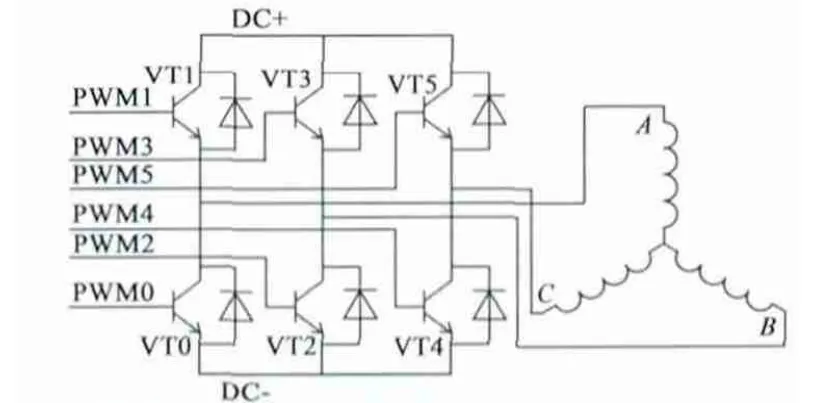
图2 BLDCM 控制器逆变电路示意图
1.2 硬件方案简介
驱动器硬件框图如图4 所示,从功能上可分为控制芯片电路、驱动电路、保护电路等。
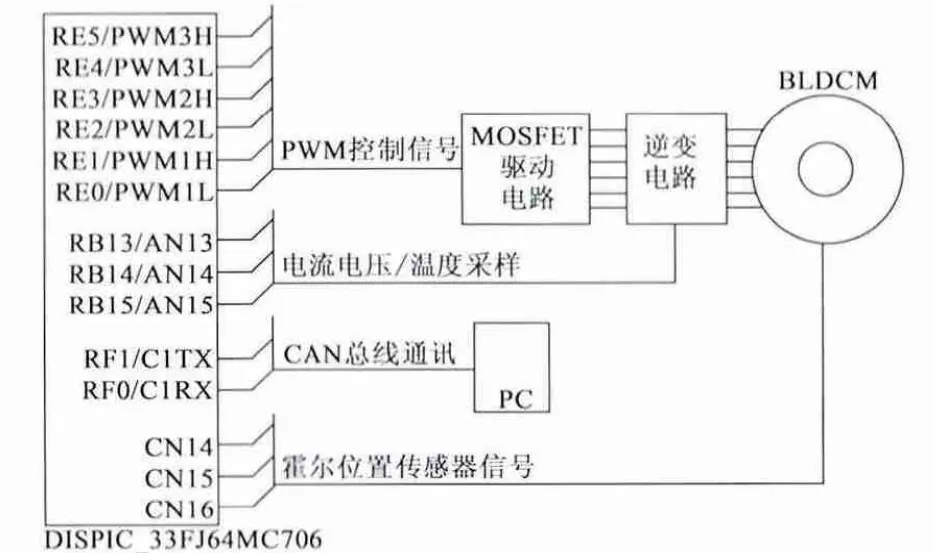
图4 驱动器硬件框图
本文的控制芯片采用了Microchip 公司的16 位高性能芯片dsPIC33FJ64MC706,芯片采用了改进的哈佛结构,运算速度最快为40 MIPS,温度范围为-40℃~ + 85℃,片上资源具有8 路电机控制PWM、2 个ADC、1 个增强型CAN 接口等。
驱动电路为典型的逆变电路,低压大电流驱动应注意功率MOSFET 的发热和逆变电路PCB 的载流能力。本文从以下三个方面对逆变电路的热设计进行了优化:(1)在功率器件选型时,选用低导通阻抗的功率MOSFET-IRFP4368,并采用了两片并联的方式,进一步降低MOSFET 的导通阻抗,进而减小MOSFET通态损耗、降低MOS 管的发热量。(2)在PCB 设计时,主回路PCB 布线时线径加宽,并在其表面去掉阻焊层,然后在PCB 表面加焊粗铜条和大面积铺锡(如图5 所示),以增加PCB 的载流能力,+50V 电源线、地线以及电机三相输出线采用较粗的铜导线引出至端子等,降低电流在主回路上的损耗。(3)本文MOS管的散热采用自然冷却的方式,通过MOSFET 与外界环境(指空气)之间的热交换,降低MOSFET 温度。本文采取了两种措施以降低 MOS-FET 与外界环境之间的热阻、提高散热性能:在MOS 管与散热器之间采用具有较低热阻的热传导材料-电绝缘矽胶布,并使用导热硅脂填充间隙;使用大面积、具有铣齿槽的散热片作为驱动器的底座,增加与空气之间的热传导面积(如图6 所示)。
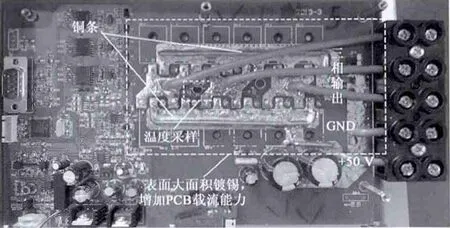
图5 大电流驱动电路PCB 设计
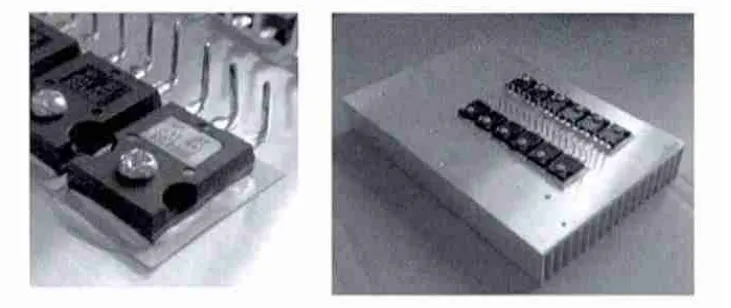
图6 MOSFET 安装图
保护电路主要处理电流、电压、温度信号,电路设计方案为单电阻采样母线电流、串联电阻分摊母线电压、DS18b20 测量温升。通过实时处理这些信号,实现驱动器的保护功能,包括过流保护、欠压/过压保护、高温保护等。
通讯采用了dsPIC33F 系列DSC 的ECAN(增强型控制器局域网)模块,它具有以下主要特性:完全符合CAN2.0B 协议,具有较高的可靠性和良好的错误检测能力,并且通讯速度快(最高支持1 Mbps的可编程比特率)、实现简单、性价比高、应用成熟。
1.3 软件方案简介
软件设计流程如图7 所示,用户通过上位机(CAN 总线)可以以下执行三种操作:了解驱动器的实时信息,包括母线电流/温度/速度/报警等;实时调节风机的运行速度;在驱动器报警后,清除报警。本文将介绍PI 调节器的设计和调速系统的控制框架。
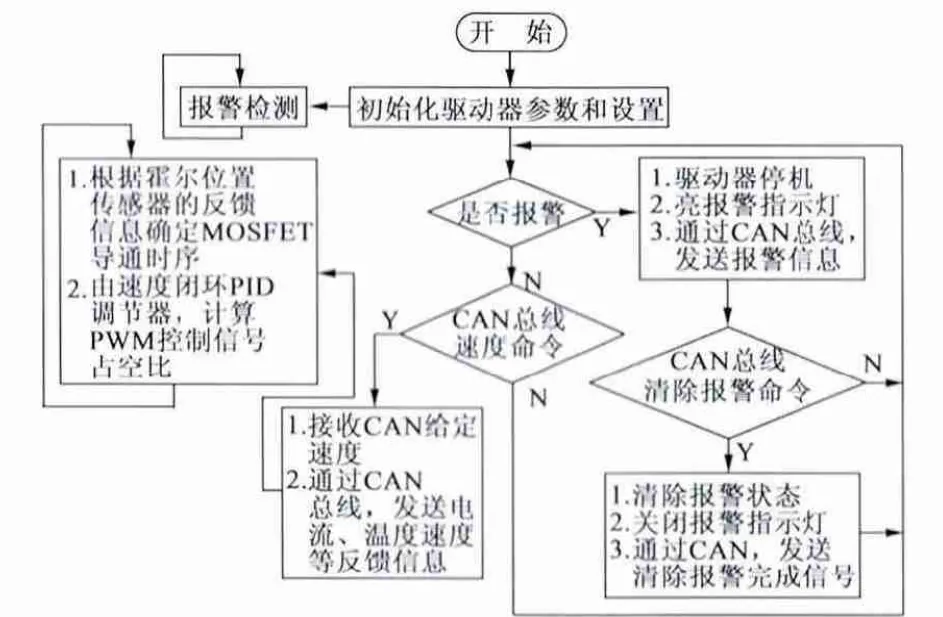
图7 软件流程图
1.3.1 速度环PI 调节器设计
数字PID 调节器有两种算式:位置式和增量式[3]。本文采用位置式PI 调节器,其输出的时域方程:

式中:u(t)为调节器在t 时刻的输出;e 代表偏差;Kp为比例环节的放大倍数;τ 为积分时间常数。离散化后第n 拍的输出方程:

式中:Tsam为采样周期,在编程时通常用KI代替上式中的,KI称之为积分环节的放大倍数。
1.3.2 BLDCM 调速系统控制构架
BLDCM 调速系统的控制框架如图8 所示,其工作流程如下:由速度的给定值Vref和实际值Vactual计算出转速偏差Verror,Verror经过PI 调节器和防止积分饱和环节,可以计算得到PWM 控制输出信号的占空比,再由Hall 传感器的状态解码得到6 路PWM输出信号的导通时序,PWM 产生器根据计算出的占空比和导通时序,输出PWM 控制信号,控制逆变器开关管动作,进而控制电机旋转。
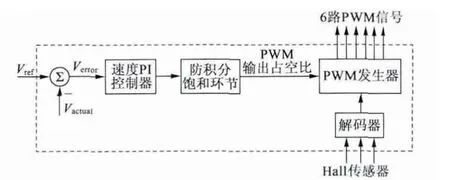
图8 调速系统的控制架构
2 测试实验
首先,通过测试三相电机的输出相电压和相电流波形,分析BLDCM 调速系统控制架构设计的合理性和适用性,然后测试大电流情况下控制器长时间工作时的稳定性(温度曲线)。
2.1 控制器轻载实验
实验过程:调节供电电源输出电压为55 V 左右,通过CAN 总线向风机发送3 000 r/min 的转速命令,并采取堵住风机进风口的加负载方式,使风机转速达到3 000 r/min 时,电源输出电流为10 A 左右。使用示波器观测三相(A/B/C)的输出电压和C相的输出电流,记录波形如图9。其中CH1 为A 相相电压,CH4 为B 相电压,CH2 为C 相相电压,CH3为C 相相电流。
在实验中,应注意电流探头的工作范围,本文采用的电流探头的型号为FLUKE i30s,其最大测试电流(有效值)为20 A,测得此时C 相电流有效值为16.5 A 左右。应注意示波器地线为电源地,而不是三相绕组的中心点。
分析图9 中波形,可以根据开关管的导通状态,将一个周期360°电角度的波形划分为6 种状态,如图所示,并且A 相、B 相、C 相每两相电压之间的相位差为120°电角度。状态1 情况,绕组导通方式为AC,对应开关管VT1、VT4 导通,VT1 为PWM 斩波,VT4 完全导通,通过控制VT1 的占空比调节风机的转速,以此类推状态2 ~6。
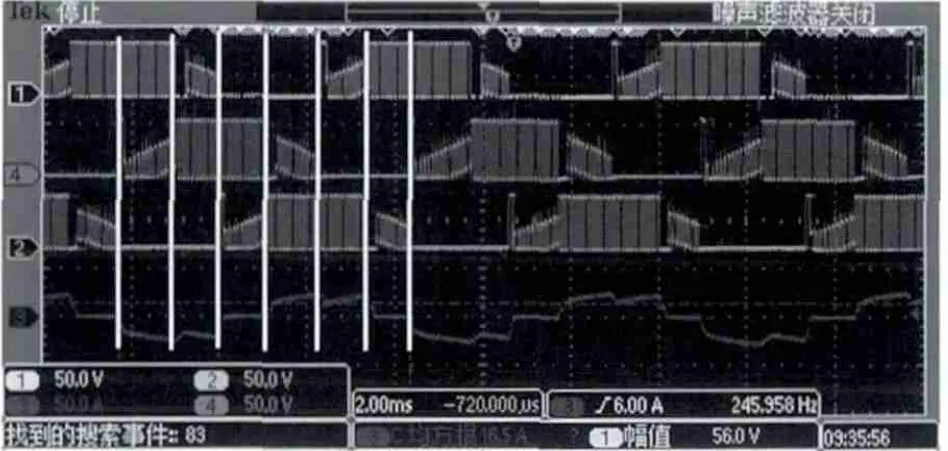
图9 三相电压与C 相相电流波形
考虑到本次应用的调速范围为900 ~4 000 r/min,避开了“二二导通”控制方式低速时产生转矩脉动的缺点,系统采用“6 拍换相二二导通”的控制模式工作正常,配合速度环PI 调节器能够平稳调节BLDCM 的转速。
2.2 温升测试实验
温升测试实验中,实验室温度在27℃左右,基本无风,控制器电源输出电压为55 V,给风机加负载,使驱动器供电电源输出电流为20 A 左右。使驱动器保持工作在大电流状态,每隔5 min 由CAN 读出温度传感器DS18b20 检测的温度,并记录结果,如图10 所示,这里对比研究了双管并联与单MOSFET 两种方案的发热量。
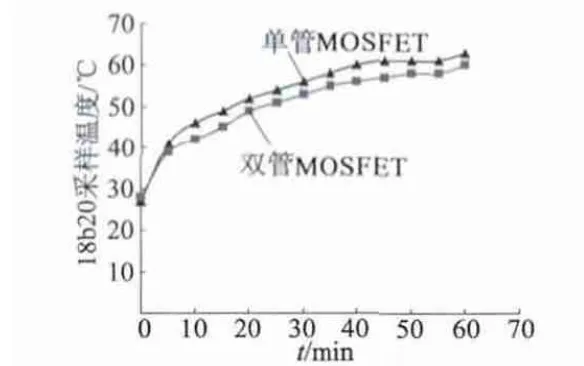
图10 驱动器温度测试实验结果
应注意此时BLDCM 相电流已经超出了电流探头的量程,使用数字电流表UNI-T UT201 测量U相输出有效电流值为30 A 左右。
实验测试结果可以定性地得到双管并联驱动的1 h 的发热量低于单管驱动,而且无论是单管还是双管方案,1 个小时后驱动器温度均稳定在60℃左右,对于驱动器来说还是比较安全的。
3 结 语
实验测试证明了基于霍尔传感器的“6 拍换相二二导通”这种简单的BLDCM 驱动方法适用于本系统,具有原理简单、成本低廉、稳定可靠等特点。驱动器在大电流状态能够长时间稳定可靠的工作。
在以后的工作中,大电流驱动器可以朝两个方向优化:继续降低驱动器工作在大电流状态下的温升,优化PCB 设计,尝试损耗更小的MOSFET,优化散热措施等。在本文的应用中,风机负载较稳定,并且对于控制精度要求不高,所以可以尝试在应用中使用无位置传感器调速技术。
[1] 龙昊,付桂翠,高泽溪.自然空气冷却情况下功率器件散热器的优化设计[J].电子元件与材料,2003,22(3):18-21.
[2] 韦啟宣.基于DSP 的无刷直流电机方波驱动与正弦波驱动研究[D].广州:华南理工大学,2012:8.
[3] 阮毅,陈维钧. 运动控制系统[M]. 北京:清华大学出版社,2006:68-70.
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
莆田学院学报(2021年5期)2021-11-13 06:36:38
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
甘肃科技(2020年20期)2020-04-13 00:30:22
电测与仪表(2016年1期)2016-04-12 00:35:12
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
电测与仪表(2014年21期)2014-04-04 12:32:08
