
无刷直流电动机无位置传感器控制技术综述
2014-01-13 10:19:28张承宁张复琳王志福
微特电机 2014年2期
张承宁,张复琳,王志福
(北京理工大学,北京100081)
0 引 言
永磁无刷直流电动机是随着微处理器技术、高频低功耗的电力电子器件、新型控制方法和永磁材料的发展而出现并不断成熟的一种新型电机。与传统的直流电动机相比,永磁无刷直流电动机没有电刷,具有维护量小、结构坚固等优点。与异步电动机相比,永磁无刷直流电动机具有控制简单、起动转矩大、调速性能好等优点,所以说这种电动机结合了直流电动机和异步电动机的优点。无刷直流电动机传统的控制方法必须依靠位置传感器来实现换向,这大大限制了它的应用,增加了成本,降低了系统的可靠性。因此,无刷直流电动机无位置传感器控制技术成为近年来研究的热点。针对不同的应用场合,人们提出了多种不同的转子位置检测方法。本文首先介绍了研究较多的几种控制方法的基本原理、优缺点和应用前景,然后分析了适合在电动汽车驱动电动机上应用的无位置传感器控制方法,最后给出了全文的总结。
1 反电势法
永磁无刷直流电动机运行时,转子永磁体产生的磁通切割定子绕组会产生反电势。当转子转过一对磁极时,反电势的正负也改变一次。所以通过检测反电势的波形就可以确定转子的位置,这就是反电势法的基本原理。对于三相星形连接的永磁无刷直流电动机,其电压方程式如下:
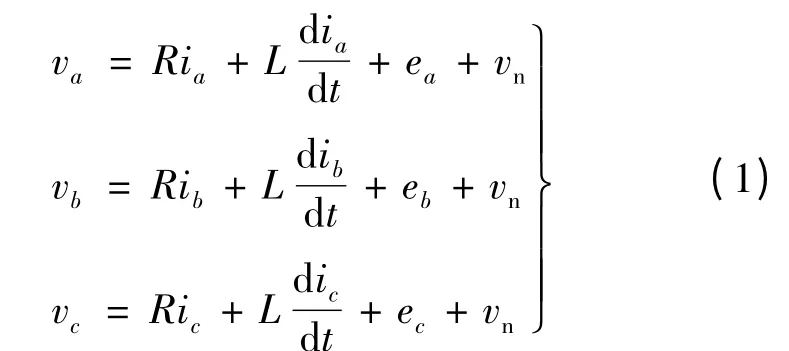
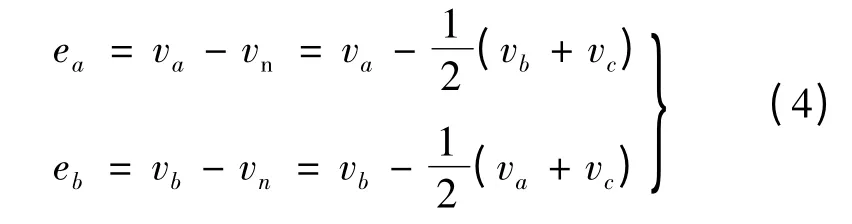
式中:R 和L 分别为各相绕组的电阻和电感;vx、ix、ex分别为绕组电压、电流、反电势;vn为绕组中点对地电压。采用两两导通控制方式,假设C 相不导通,ic=0,ia=-ib。在C 相反电动势过零点附近有ea=-eb。此时将式(1)中的前两个方程相加可以得到:

将式(2)代入式(1)的第三个方程可以得到:

同理可得:
由以上分析可得无刷直流电动机的反电势波形为120°平顶宽的梯形波,如图1 所示。
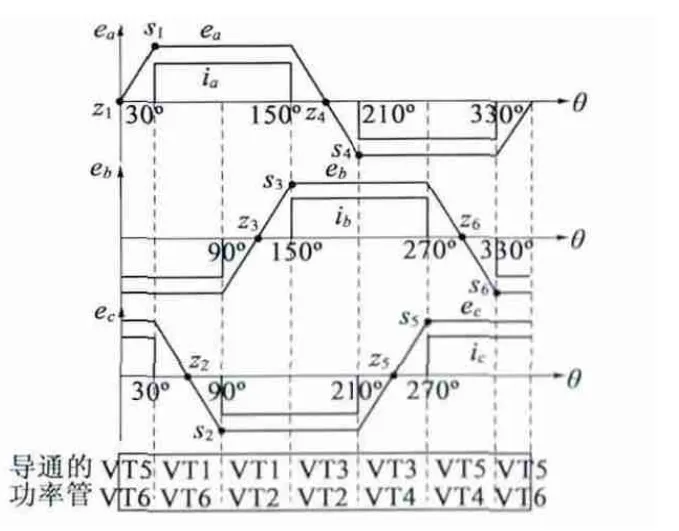
图1 反电势过零点延迟30°换相原理图
S1~S6为一个周期中的6 个换向点,这6 个点均位于某项反电动势的过零点后30°电角度。所以通过反电势可以很方便地实现对转子位置的估计。
反电动势法的原理和实现都比较简单,是目前最成熟、应用最广泛的一种方法。但这种方法也存在明显的缺点。第一,反电势过零点的获取困难,而且容易受到干扰,产生误过零信号。目前的解决方法是使用深度滤波电路来进行滤波,但会使反电势信号产生非常大的相移,补偿困难。第二,反电势的幅值正比于电机的转速,电机低速运行时反电动势的幅值小,很难得到精确值。当电机转速为零时,反电势也为零,无法实现电机的起动。第三,反电势法的前提是反电势波形为标准的梯形波,实际应用中很难保证这一点,这会导致反电势过零点的偏离。由于以上三点的存在,使得反电势法在实际应用中存在很多的限制。
2 定子三次谐波法
这种方法是对定子绕组中电压信号的三次谐波行积分,当积分值为零时控制开关管动作。三次谐波的检测主要有两种方法,当电机的中性线可以引出时,在电枢绕组的三个端点并接一个星型电阻网络,网络的中点与电枢的中性线相连,经过对电阻上的电压滤波就可以得到三次谐波分量。当电机的中性线不方便引出时,通过测量星形电阻网络中性点与直流侧的中点之间的电压来获得三次谐波,不过此时得到的电压三次谐波分量含有高频分量,必须使用低通滤波器进行滤波。第二种方法的推导如下所示。
如图2 所示,s 为虚构的电阻网络中点,s 点与直流母线电压中点间存在由电动势三次谐波构成的电压信号:

式中:u3为反电动势三次谐波分量;uhf为反电动势其它高次谐波分量之和。由于三次谐波信号的过零点和三相反电动势的过零点在时间上是重合的,所以通过检测ums就可以得到电机的换相点。
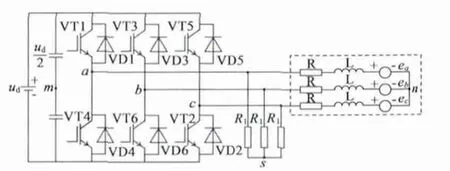
图2 三次谐波法电机主电路图
定子三次谐波法在理论上是可行的,但是在实际应用中存在很多明显的缺陷:如需要附加很多检测设备,安装不方便;电机低速运行时,由于反电势较小,三次谐波信号不容易被测量到。这些都限制了三次谐波法在实际的应用。
3 续流二极管法
续流二极管法判断转子位置是通过检测不导通的开关管两端反并联的二极管中的电流。其原理如下:当永磁无刷直流电动机工作在120°导通方式时,反电动势的作用会使不导通相两端的电压升高至比母线电压高,或者降低到低于零电压。此时不导通相的上下桥臂的反并联二极管会导通,导通时刻与转子位置有很大关系。所以通过检测不导通相二极管中的电流就可以得到转子的位置信号。具体分析如下:
对于图3,当VT1 和VT6 开通时,c 相为不导通相,只对VT1 进行PWM 控制,当VT1 由开通变为关断时,电流通过VD4 在绕组内部续流,有:

式中:uVT和uVD分别为开关管和二极管的饱和导通压降,要使二极管VD2 导通,必须uc<uVD,将其代入式(6)得到:

在不导通相c 相反电势ec的过零点附近,ea+eb=0,又因为uVT和uVD相对于ec来说很小,则式(7)可以化简:

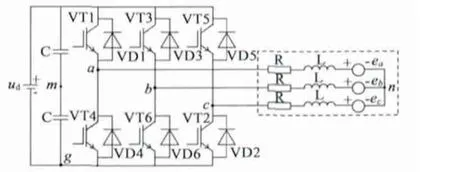
图3 无刷直流电动机主电路原理
从上面的分析可以看出,只要检测到不导通相c 相反电势小于0,就能得到uc<-uVD,二极管VD2就会导通。反之,如检测到二极管VD2 上有电流流过,此时的c 相反电动势就处在过零点,再延迟30°就可得到对应的换相点。同理可得其他的换相点。
续流二极管法不依赖电机的转速,可以应用在较低的转速范围,这是它最大的优点。但是其缺点也同样突出:首先,由于需要分别检测6 个反并联二极管中的电流,不能用于集成的功率器件。其次,这种方法只能用于前60°PWM 调制后60°恒通的控制方式,这大大限制了它的应用范围;此外,使用这种方法时,硬件上必须有六路互相隔离的电源,这会使硬件设计的难度加大,增加系统的复杂性和成本。
4 电感法
永磁无刷直流电动机的转子处于不同的位置时,定子绕组的电感值也会发生改变。所以,可以通过检测定子绕组电感值的变化来确定转子的位置。
具体分析如下:假设VT1 和VT6 导通,当ec>0时,Lb>La,un>;当ec<0 时,Lb<La,un<;当ec=0 时,才有Lb=La,un=。因此,电机定子绕组电感值相等的时刻就是电机反电势的过零点时刻,再延迟30°电角度就是换相点。这是传统电感法的实现方法,其原理比较简单,但实际应用时的精确度很难保证。
随着永磁技术的发展,人们提出了一种新型的电感法。由于定子铁心具有非线性磁化和磁饱和特性,导致靠近磁极的绕组在顺磁方向的电流变化率大于逆磁方向。如果把一个恒定的电压矢量加在电机绕组上,转子的位置不同,流过绕组的电流值也不相同。通过比较电流值的大小就可以确定转子磁极的位置。
图4 是d、q 坐标轴开关矢量函数平面图,d 轴是转子的N 极位于某相绕组的轴线时对应的位置。逆变器中六个开关管的状态对应图中的六种矢量。首先给电机对应d 轴的定子绕组上分别加电压矢量V1与V4,得到I1与I4。如果I1近似等于I4,则说明转子位置(转子磁极北极)与电压矢量V1或V4垂直,但是不能确定具体方向。此时,更换电压矢量,重新加在绕组上。如果I1>I4,说明电机的转子位置位于q 轴的右半平面;如果I1<I4,则说明电机的转子位置位于q 轴的左半平面。这就把转子位置确定在180°电角度范围内。假设I1>I4,再把电压矢量V2与V6分别加在相同的定子绕组上,得到I2与I6。把I1、I2、I4、I6的值进行比较。假设I1最大,说明转子位置处于Ⅰ或者Ⅵ区域内靠近d 轴的30°范围内。再利用位于q 轴处的定子绕组电感值最大,可以进一步把转子位置精确到30°电角度范围内。即如果I2>I6,说明转子位置在Ⅰ区域内靠近d 轴的30°电角度范围内,如果I2<I6,转子位置在Ⅵ区域内靠近d 轴的30°电角度范围内。
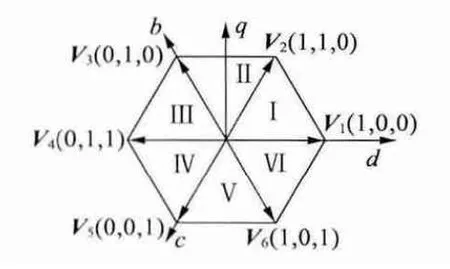
图4 开关矢量函数图
以上两种电感法不依赖于电机的转速,在电机转速为零时也可以估算转子的位置,所以可以用来进行电机的起步。但这两种方法需要对绕组电感进行不断的实时检测,很难保证检测的精度。如果能够利用前述电感的特性,电机初始设计时,故意放大电感随转子位置的变化这一现象,使电感检测更加精确,这种方法将会成为非常成熟的一种无位置传感器控制方法。
5 智能控制法
无刷直流电动机参数多,各个参数之间互相耦合且不确定,难以建立线性的数学模型。所以,用传统的控制方法实现无位置传感器控制难度很大。智能控制法提出了对这种控制对象的新的控制思路。无刷直流电动机无位置传感器智能控制法主要包括扩展卡尔曼滤波法、人工神经网络法以及模糊控制等方法,这里只对扩展卡尔曼滤波法和模糊控制法进行介绍。
5.1 扩展卡尔曼滤波法
这种方法是在获取绕组电压、电流和不导通相反电势等变量的基础上,利用数学算法估算电机转子的位置和转速。状态观测器的建立比较简单,取状态变量为角速度ω、转子位置角θ,系统输入为电磁转矩Te、负载转矩Tl、转动惯量J,观测方程取线性化的反电势e 关于ω、θ 的函数,建立电机在状态空间中的模型,就可以直接得到ω、θ。但是实际应用中参数的测量和观测方程的线性化会引入误差,因而直接计算出来的数据是不准确的,必须通过卡尔曼滤波器进行滤波,这就是卡尔曼滤波器方法基本原理。
扩展卡尔曼滤波法在高速、重载,环境恶劣的条件下都能很好地控制电机。但是,滤波器的设计复杂,计算量大,实际应用中需要运算速度快、处理能力强的控制器,会大大提高系统的成本和开发难度。近些年来,数字信号处理器(DSP)的出现使扩展卡尔曼滤波法在无刷直流电动机无位置传感器控制中的应用提供了可能。相信随着微处理器技术的不断发展,扩展卡尔曼滤波法的应用也会越来越成熟。
5.2 模糊控制法
传统的控制理论无法处理难以精确描述的系统,因此人们提出了模糊控制的方法来处理这些控制问题,这就出现了模糊控制器。模糊控制器的参数和控制规则主要是根据工程师和操作人员的经验确定的,实际控制时再加入适当的人工操作与自动调整,这就是模糊控制的控制过程。
对于无刷直流电动机来说,要对其进行无位置传感器的模糊控制,首先要通过传感器得到电机的转速值,然后计算速度偏差和偏差率,模糊化处理后得到模糊控制量,最后将模糊控制量反模糊化为精确的控制量去控制电机的运行。
模糊控制方法的优点是不需要建立电机的数学模型,鲁棒性强。缺点是建立模糊控制器的过程主要靠经验和试凑,而模糊控制规则的建立有时很复杂,而且控制规则一旦确定,不能在线更改,稳态精度也不高。
6 转子磁链法
这种方法是根据电机的等效电压模型,而建立与一个与转子磁链相关但又不依赖于转速的函数,以获得换相信号。电机等效电压方程:
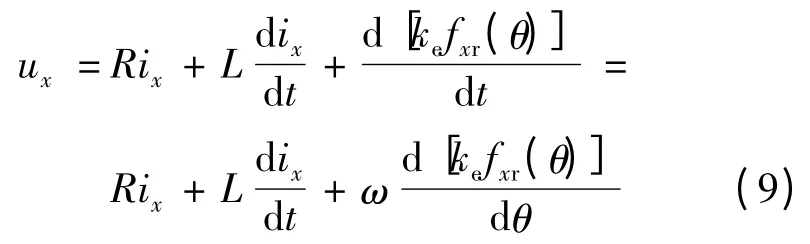
式中:x=a、b、c;ke为磁链系数;fxr(θ)为磁链函数。两相相减可得:
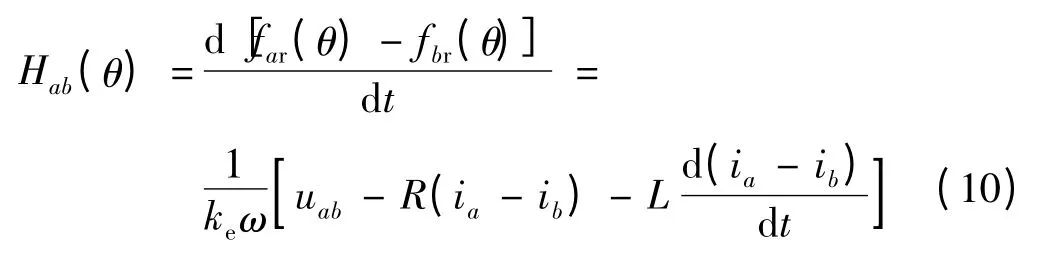
同理可得另外两个H 函数,定义G 函数为将其中两个H 相比:
该函数G 在一个电周期内有两个相差180°电角度的峰值,刚好对应电机的两个换相点;同理可得另外四个换相点。这样就能得到依次相差60°电角度的六个换相点。这种方法建立的函数与转速大小无关,理论上可以应用在任意转速下。但实际应用中需要精确的电压电流值,而且对电机参数的精确性有很大依赖,这大大降低了这种方法的鲁棒性和抗干扰性。
7 在电动汽车上的应用
以上对各种无位置传感器控制方法的原理以及优缺点的介绍只是概括性的,并不涉及具体的应用环境,如果具体到用来驱动电动汽车行驶的电机来说,由于电动汽车的特殊工作环境,会对驱动电机的工作特性提出一些特殊的要求。与普通的工业电机相比,电动汽车所用的驱动电机具有以下几个特点:
(1)电动汽车用的电机的最高转速要求达到在公路上巡航时基本速度的4 ~5 倍;而工业电机只需要达到恒功率是基本速度的2 倍即可。
(2)电动汽车驱动电机要求工作可控性高、稳态精度高、动态性能好;而工业电机只有某一种特定的性能要求。
(3)电动汽车驱动电机被装在机动车上,空间小,工作在高温、坏天气及频繁振动等恶劣环境下。而工业电机通常在某一个固定位置工作。
以上三点特性会影响汽车的驱动电机无位置传感器控制方法的选择。总的来说电动汽车的驱动电机要求电机的工作范围很宽,能在很高和很低的速度下运行;需要频繁的起动和制动;工作可靠性要求很高,能在恶劣的环境下正常工作等。这些要求决定了在电动汽车上采用的无位置传感器控制方法必须可以快速并且可靠地使电机起动,必须要有很高的控制精度,转矩脉动要尽可能小,抗干扰能力强,在恶劣的环境下也要能够可靠地运行。
现在采用较多的反电动势法等传统方法由于起动困难、在低速下误差较大等缺点与新型的控制方法(比如智能控制法等)相比并不适合用在汽车上。随着微处理器技术的不断发展,这些新的控制方法比如卡尔曼滤波法、神经网络法等实现越来越方便,而且这些方法特别适合对电机的起动和低速范围的控制,以及特别适合对电机这种多变量、强耦合非线性系统的控制,可以预见的是未来电动汽车的驱动电机所采用的无位置传感器控制将会越来越多地采用这些新型的控制方法,这些控制方法也必将会成为未来一段时间研究的热点。相信随着研究的不断深入,这些新型的控制方法必将会越来越成熟地用在电动汽车上。
8 结 语
本文首先介绍了目前研究较多的几种无刷直流电动机无位置传感器控制方法的基本原理、实现方法及优缺点等。这些方法各有优缺点,但由于它们远远没有达到成熟应用的地步,所以具有很大的继续研究的价值。然后分析了在电动汽车上适合采用的方式——智能控制法。随着研究的进步,本文介绍的智能控制法(包括卡尔曼滤波法、神经网络法)将会越来越多地应用到电动汽车的驱动控制领域。
[1] 张琛.无刷直流电机原理及应用[M].北京:机械工业出版社,2001.
[2] 吕鲁莹,陈敏祥.无刷直流电动机无位置传感器技术的新发展[J].微特电机,2008(9):56-59.
[3] 卿晓辉.基于反电动势法的无刷直流电机的控制研究[D].湖南:湖南大学,2006.
[4] 李自成.无刷直流电机无位置传感器控制关键技术研究[D].武汉:华中科技大学,2010.
[5] 张相军.无刷直流电机无位置传感器控制技术的研究[D].上海:上海大学,2001.
[6] Tae-Hyung K,Ehsani M. Sensorless control of the BLDC motors from near zero to high speed[J].IEEE Transations on Power Electronics,2004,19(6):1635-1645.
[7] 杨影,陶生桂.基于磁链函数的无刷直流电动机转子位置检测法研究[J].变流技术与电力牵引,2007(3):55-59.
[8] Su G J,Mckeever J W. Low-cost sensorless control of brushless dc motors with improved speed range[J]. IEEE Transactionson Power Electronics,2004,19(2):296-302.
[9] Shao Jianwen. An improved Microcontroller-Based sensorless brushless DC motor drive for automotive applications.IEEE transactions on industry applications,2006,42(5):1216-1221.
[10] Mohammed M,Ishak D,Hammadi K.Improved speed operation of sensorless BLDC motor drive using digital filter[C]//IEEE International conference on power and energy.IEEE,2010:759-764.
[11] Makiela D. Sensorless control of high-speed PM BLDC motor[C]//IEEE International Symposium on Industrial Electronics.2011:722-727.
[12] Zhang Lei,Xiao Wei.Sensorless control of BLDC motors using an improved low-cost back EMF Detection method[C]//37th IEEE Power Electronics Specialists Conference.2006:1-7.
[13] Johnson J P,Ehsani M.Review of sensorless methods for brushless DC[C]//IEEE 34th IAS Annual Meeting.IEEE,1999,1:143-150.
[14] 沈建新. 反电势法检测无刷直流电机转子位置的误差分析[J].电工技术学报,1998,13(1):10-14.
[15] Kim T,Kim C,Lyou J.A new sensorless drive scheme for a BLDC motor based on the terminal voltage difference[C]//37th Annual Conference on IEEE Industry Electronics Society. IEEE,2011:1710-1715.
猜你喜欢
防爆电机(2020年4期)2020-12-14 03:11:02
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:47
云南电力技术(2015年2期)2015-08-23 01:31:52
电源技术(2015年11期)2015-08-22 08:50:58
电测与仪表(2015年8期)2015-04-09 11:50:00
河南科技(2014年23期)2014-02-27 14:18:56
新高考·高一物理(2012年5期)2012-04-29 20:27:57
