
武器装备虚拟维修训练系统的设计与实现
2014-01-03 06:36耿朝阳刘德明
电子测试 2014年1期
耿朝阳,刘德明
(西安工业大学计算机科学与工程学院,陕西西安,710032)
0 引言
VR 技术是一门以计算机图形学、人工智能、多媒体、传感器、网络以及数字图像处理等多学科为基础的综合性信息技术。虚拟维修技术是VR 技术的一个重要分支,是机械领域的重要应用。随着1993 年美国哈勃望远镜虚拟维修训练的成功应用,虚拟维修训练已经成为全世界装备维修训练研究的热点。洛克希德·马丁公司在F-22 战斗机设计过程中使用人机交互软件环境构建的虚拟维修系统,取代物理样机,减少了研发费用和研发周期。
虚拟维修训练系统实现过程中,一般采用虚拟现实软件有EON Studio、Virtools 等,为了使系统有更好的扩展性以及更好的与专家系统进行整合,本文采用另一种现实方式。利用3DS MAX 三维建模工具构建与实际装备一样的三维数字模型,VC++ 6.0 开发环境下,采用流行的标准语言OpenGL,编程实现装备实时三维动画设计,将拆装装备的全部活动和所需要的资源通过虚拟现实技术在计算机上再现,完美的展现出装备的外形特征与内部组成部件,很好的实现一个比较完善的装备虚拟拆装训练系统,并在该系统的基础上实现了维修演示、维修训练和维修技能考核等功能。
1 系统的总体设计
1.1 要实现的功能
(1)虚拟场景的构建。这是虚拟维修系统最基本的功能。首先利用三维建模软件,以实际装备为基础,实现装备的三维建模。然后实现读取建好的三维模型并显示在程序中。最后利用一定的交互手段实现与系统的人机交互,并实现三维模型中零部件的识别、移动功能。
(2)系统信息管理的实现。包括维修人员信息的管理,装备故障数据的维护,装备零部件拆装序列以及路径的规划。
(3)训练模式的划分。根据武器装备的实际维修训练过程,可将训练划分为演示模式、学习模式和考核模式三种模式。在演示模式维修人员可以自由的查看装备的组成部件,从而了解装备的工作原理。学习模式下,维修人员可系统的提示下,对装备的某个故障进行分析,判断出问题零部件,并在系统的引导下按规划的顺序与路径完成零部件的拆装和替换。考核模式下可对维修人员对维修对象和任务的理解和熟练程度进行定量的考核和定性的评估。
1.2 模块化设计
(1)虚拟场景构建模块。该模块是整个系统中最基本的模块,用来演示装备部件、子系统和整体的三维视图。以鼠标和键盘作为人机交互工具,通过对鼠标和键盘的操作,实现训练过程中虚拟场景中维修人员视角的转换以及虚拟场景视野的缩放。
(2)装备零部件级拆装模块。该模块主要用来实现装备中零部件的拆装与移动。在演示模式下应能够实现自动拆装功能,向维修人员演示连续的拆解、装配过程。在学习模式和考核模式下应能够实现手动拆装功能。学习模式下,系统通过适当的引导和提示信息,维修人员通过鼠标点击需要拆装的零部件,帮助维修人员完成自主学习。当零部件的点击顺序错误时,拆装无法完成,系统给出错误信息。考核模式下,只有维修人员按照正确的拆装顺序点击装备的零部件时该零件才会被自动拆卸下来。
(3)系统信息管理模块。维修人员信息的管理包括人员登录管理、登录密码修改、信息查询。故障数据维护包括武器装备的故障数据添加、删除、修改,并根据考核的需要设置故障数据。装备零部件拆装序列规划包括根据维修手册的说明,确定零部件拆装的先后顺序,生成符合维修规范的动作序列。确定零部件拆装序列后,需对零部件的路径进行规划,即拆装过程中零部件移动的方向和距离。为使拆装过程更形象、真实,应避免在零部件移动过程中发生穿透、遮挡、重叠等问题,并且零部件最终停放位置布局应美观、合理。
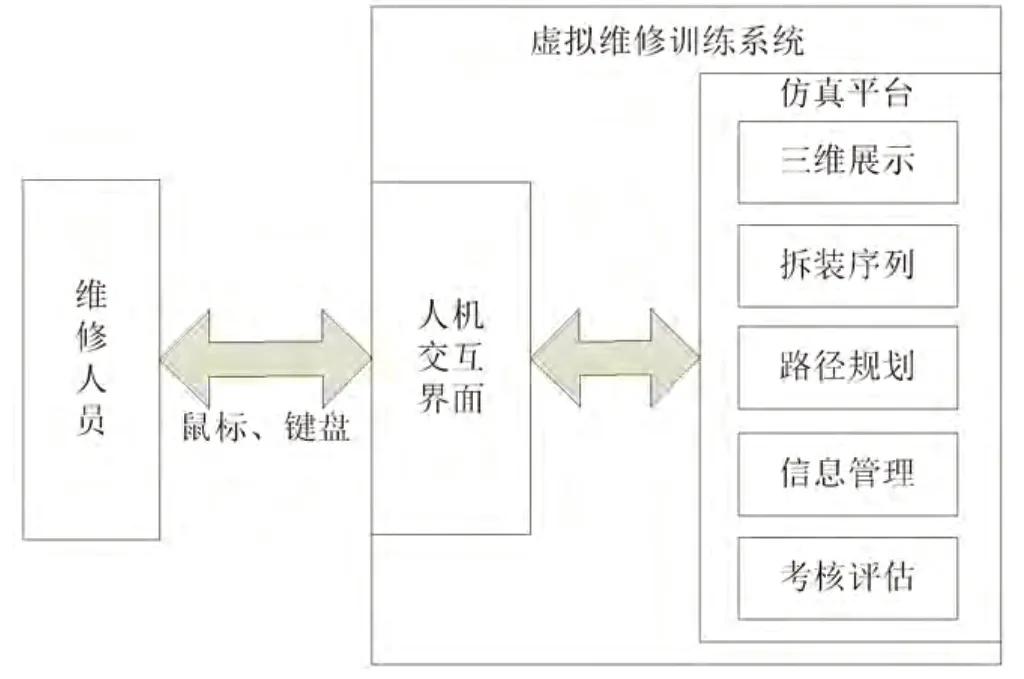
图1 虚拟维修训练系统总体框架
(4)考核评估模块。该模块能根据已有维修操作的动作序列,实现对考核模式下维修人员整个维修过程的监控、误操作的记录和辨别,并根据实际操作表现,如完成特定维修任务所用的时间、操作的正确性进行打分和评估,将分数以及评估结果进行保存。虚拟维修训练系统总体框架如图1 所示。
2 武器装备虚拟维修演示训练系统的实现
2.1 基础数据的准备
(1)维修对象的三维建模数据。三维建模是虚拟维修的基础,建模的好坏直接关系到交互性和沉浸感的实现。这里采用流行的3DS Max 三维设计软件。它集三维建模、材质制作、灯光设定以及渲染输出为一身,且生成的.3DS 文件应用广泛,保存内容丰富。某装备贴图渲染后的效果图如图3 所示。
(2)故障数据。在虚拟维修训练系统中,一般是根据装备故障来引导完成训练任务的。根据装备维修说明书里的对故障的描述,找出可能发生故障的原因,确定发生故障的零部件,有针对性的制定维修方案,建立该故障与零部件之间的故障关系数据库,在此基础上来确定合理的训练内容与形式,将故障数据保存在配置文件中。
(3)最佳维修的拆装序列及零部件的路径规划数据。确定故障与零部件之间的故障关系,对故障零部件进行维修或者替换操作。利用装备维修手册里的拆解说明,确定零部件的拆解顺序,得到最佳拆解序列,将数据保存在配置文件中。

图3 某装备贴图渲染后的效果图
安装过程则为拆解过程的逆过程。为使拆装过程更形象、真实,要对零部件的移动路径进行规划,需定义零部件移动的方向和距离。对方向和距离进行反复调试,得到较理想的位置,并将数据保存在配置文件中。
2.2 实现方案
仿真平台是在Visual C++ 6.0 基础之上,利用OpenGL 提供的强大的底层图形库,通过C++编程来实现。编程实现.3DS 文件在程序中的展示,利用鼠标和键盘实现人机交互,实现对模型中各个零部件的识别。读取保存故障数据、拆装序列和路径规划数据的配置文件,实现故障识别、零部件拆装、零部件拆装过程运动约束等功能。图5 为虚拟维修系统中某装备在完成某个部件拆解后的状态。
2.3 系统分层结构
为使系统有较好的兼容性,能够适用于不同类型的装备,本文采用分层系统结构。这里分为三层结构:模型层、控制层、视图层,如图6 所示。模型层是系统在运行过程中需要用到的初始化数据,如装备三维模型、故障数据等;控制层是实现系统功能的核心,用来对模型层里的数据进行处理,完成系统的各项功能;视图层是维修人员与系统的人机交互界面,用来接收维修人员的鼠标、键盘灯操作。院,2009.
[4] 刘佳,刘毅.虚拟维修技术发展综述[J].计算机辅助设计与图形学学报,2009,21(11):1519-1534.
3 结束语
为了适应部队信息化要求,以虚拟现实技术为基础,开发了一套武器装备虚拟维修演示训练系统,通过人机交互,该系统向维修人员展示武器装备的结构、组成原理,并能对故障零部件实现拆装过程,从而指导维修人员完成维修训练,达到在实际装备上进行维修训练的效果。本系统采用层次化、模块化设计,对不同类型的装备有较好的兼容性,极大的增强了系统扩展性,减少了系统后期维护成本,为其它装备虚拟维修系统的开发提供了参考,是对传统维修训练方法一种有效的替换。
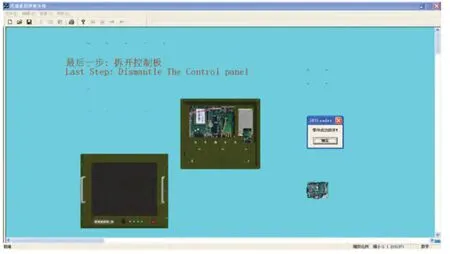
图5 某装备在完成某个部件拆解后的状态
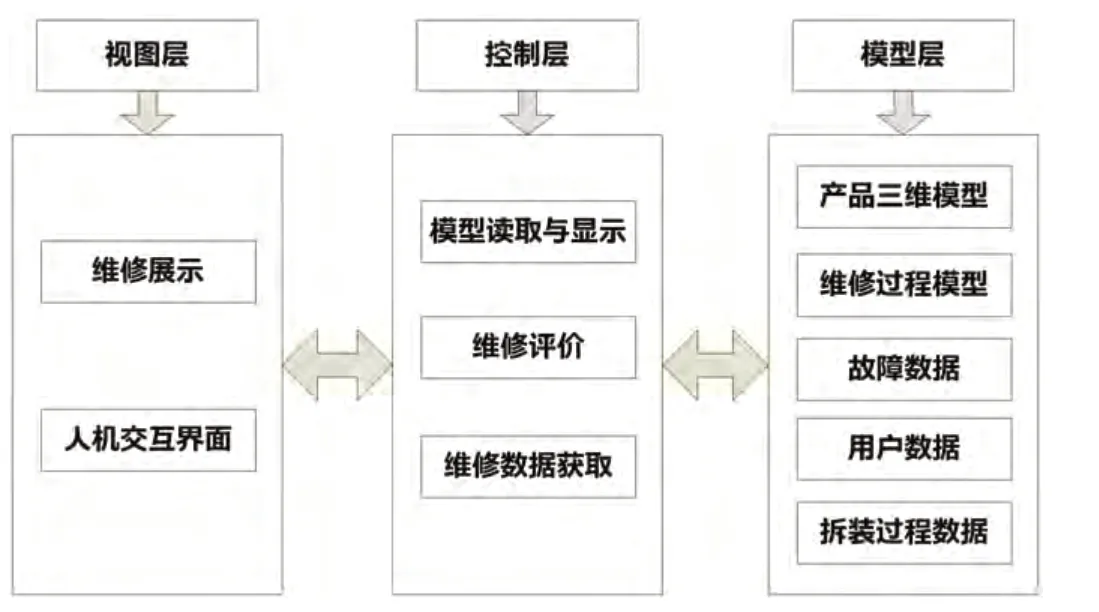
图6 虚拟维修训练系统分层结构
[1] Trebilcock.Virtual Reality[J].Modern Materials Handling,2003,58 (5):55- 60.
[2] 杨宇航,李志忠,董巍,等.基于虚拟现实的导弹维修训练系统[J].兵工学报,2009,20(6):297-300.
[3] 黄海亮.自动装弹机虚拟维修技术研究[D].装甲兵工程学
猜你喜欢
环球时报(2022-09-07)2022-09-07
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
环球时报(2022-05-26)2022-05-26
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
小哥白尼(趣味科学)(2020年6期)2020-05-22
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
现代防御技术(2014年6期)2014-02-28
汽车与新动力(2012年1期)2012-03-25
