基于PLC和WinCC 的机械手监控系统设计
2013-12-24 07:36郑长山
重庆电力高等专科学校学报 2013年5期
郑长山
(扬州工业职业技术学院,江苏扬州225127)
0 引言
PLC技术在工程上应用十分广泛,尤其针对机械手,它能部分代替人工操作,能按照生产工艺要求,遵循一定的程序、时间和位置来完成工件的传送和装卸。机械手的应用可以大幅度减少人工重复操作,降低生产过程中的危险系数,极大地提高生产效率与工作精度。此外,机械手还能在无人区或对人有害的环境中正常工作[1]。
本文研究了基于PLC的机械手控制系统的设计,还研究了组态软件WinCC在机械手控制系统中的应用,利用WinCC设计了机械手模型控制系统监控界面,提供了较为直观、清晰、准确的机械手运行状态,为故障诊断提供了多方面的可能性,充分提高了系统的工作效率。
1 系统功能设计
机械手有三种运行方式:自动运行、单周期运行和手动运行。见图 1[2]。

图1 机械手工作示意图
1.1 自动运行方式
当机械手在原点时,按下启动按钮,传送带运转。当光电开关PS检测到工件后,传送带停止运行。自动启动机械手下降,碰到下降极限开关,机械手停止下降,同时接通夹紧/放松电磁阀线圈。
当夹紧到位时,压力继电器动合触电闭合,接通上升电磁阀线圈。
上升到位时,碰到上升极限开关,机械手停止上升,同时接通右旋转电磁阀线圈。
右旋转到位时,碰到右旋转到位开关,停止右旋转,同时接通下降电磁阀线圈,机械手下降,碰到下降极限开关,停止下降,同时断开夹紧/放松电磁阀线圈,放松时间为4秒。
4秒后自动启动机械手上升,上升到位,碰到上升极限开关,机械手停止上升,同时接通左旋转电磁阀线圈。
左旋转到位,碰到左旋转极限开关,停止左转,回到原点,再次自动启动传送带,当光电开关PS检测到工件后,又开始新的工作循环周期。工作流程如下:

1.2 机械手单周期运行
机械手单周运行是指按下启动按钮后,机械手从原点开始下降,完成上述动作后停止运行。若要求机械手继续工作,要再次按下单周期启动按钮。
1.3 机械手手动运行
机械手手动运行是指机械手的上升、下降、左旋转、右旋转、夹紧/放松等操作通过对应的手动操作按钮来控制,与操作顺序无关。
2 系统硬件设计
采用上述三种工作方式设计控制系统。
(1)根据任务进行输入和输出分析,最后确定16个数字量输入,6个数字量输出。
(2)根据输入/输出的个数,本着够用的原则,选择适合的硬件组态,保存和编译。硬件组态过程如下:
如果选择了电源模板PS307,必须安装在1#槽位上;CPU模板的安装位置紧挨着电源模板,安装在2#槽位上;用于连接扩展机架的接口模板IM,安装在3#槽位上;各种信号模板SM,安装在4~11#槽位上。从4#槽位开始,CPU为信号模板分配I/O地址,且根据信号模板的类型递增I/O地址[2]。
PLC硬件组成如图2所示。

图2 PLC硬件组成
3 编程及仿真调试
3.1 地址及变量分配
输入/输出地址分配如表1所示。在WinCC中输入操作变量和输出显示变量。
3.2 编程
根据任务、地址分配及WinCC变量编写机械手程序。
双击SIMATIC Manager,打开OB1,将程序键入。
程序中有现场控制的输入和输出,还有通过WinCC画面控制的输入操作变量和输出显示变量。
机械手部分程序如图3所示。

图3 机械手部分程序
3.3 仿真调试
用STEP-7编程软件编好的程序,在SIMATIC管理器下,单击选中SIMATIC300站点,S7-PLCSIM模拟软件在STOP状态下下载,然后选择RUN,根据任务调试程序,现场输入和输出调试,WinCC中输入操作变量和输出显示变量调试。S7-PLCSIM模拟软件如图4所示。
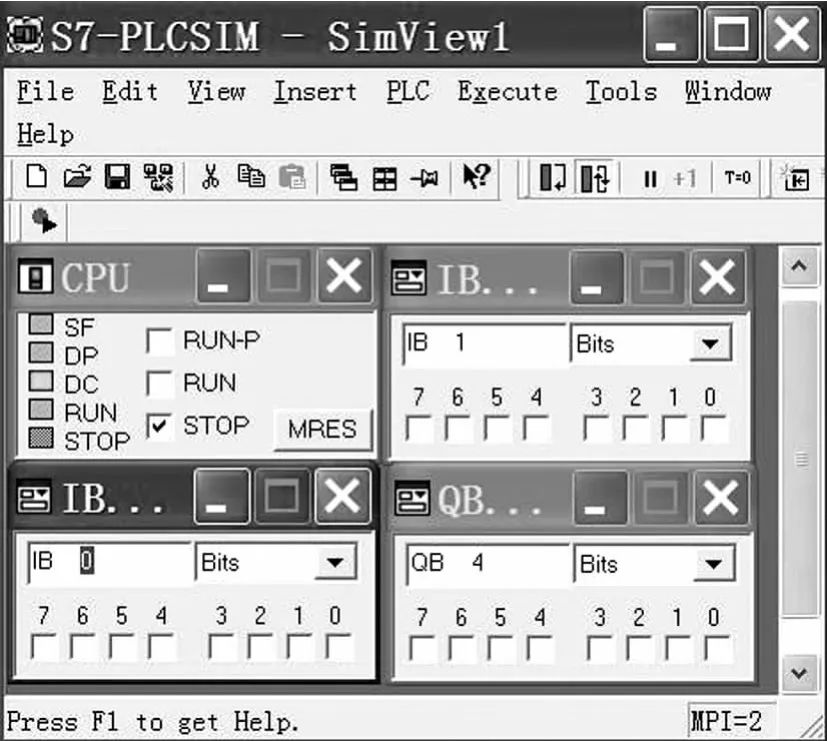
图4 S7-PLCSIM仿真软件
自动运行方式:自动启动按钮按下再松开,用鼠标在I0.0打“√”,再去掉“√”来模拟;传送带启动运行;输出Q4.0打“√”来模拟传送带启动运行。当光电开关PS检测到工件后,用鼠标在I1.1打“√”来模拟;传送带停止运行,输出Q4.0的“√”自动消失模拟传送带停止。机械手自动下降,输出Q4.5自动打“√”来模拟传送带下降;机械手碰到下降极限开关,用鼠标在I1.5打“√”来模拟;碰到下降极限开关,机械手停止下降,输出Q4.5的“√”自动消失模拟机械手停止下降。
单周期运行方式和手动运行方式跟自动运行方式在方法上类似。
根据表1在WinCC中输入操作变量和输出显示变量。WinCC的输入变量M打勾,观看输出Q显示勾变化。
4 WinCC组态及监控设计
WinCC组态及监控过程如下:
(1)双击Windows桌面SIMATIC WinCC Explorer。
(2)鼠标左键单击新建WinCC项目,选择单用户项目,起名字为“机械手PLC控制及WinCC监控”,单击“确定”按扭。
(3)右击WinCC资源管理器左边中的“变量管理器”。单击“添加新的驱动程序”选项,在“添加新的驱动程序”对话框中,选中“SIMATIC S7 Protocol Suite.chn”打开。
(4)右击通道单元MPI,在弹出的菜单中,单击“新驱动程序连接“选项。
单击属性按钮,选择2#插槽。单击“确定按钮”。
(5)右键NewConnection,选择新建变量,名称输入自动启动按钮SB1,数据选择位内存,M20.0;右键NewConnection,选择新建变量,名称输入正常停止按钮SB3,数据选择位内存,M20.3;右键NewConnection,选择新建变量,名称输入上升极限开关,数据选择位内存,M20.4。用此法,按照上面的表1,建立输入显示变量。
右键NewConnection,选择新建变量,名称传送带接触器,数据选择输出,地址Q4.0。同理用此方法,按照表1建立其他输出变量。如图5所示。
(6)编辑过程画面
①在 WinCC资源管理器中,右击“画面编辑器”。
②在弹出菜单中,单击“新建画面”选项。
③在WinCC资源管理器右边的子窗口中,双击“Newpdl.pdl”,打开画面编辑器。
④在打开的图形编辑器中编辑自己想编辑的画面。如图6所示。
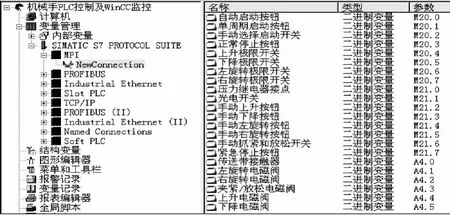
图5 输入操作变量和输出显示变量

图6 WinCC画面图形
(7)连接输入的操作变量,鼠标光标放在画面的自动启动按钮上,按钮按下为“1”,设置过程:右键→属性→事件→按钮→鼠标→按左键→右键C动作→删除大括号内容→在大括号内英文状态下键入{SetTagBit(“”,1);}→引号内容到窗口编辑动作中的变量选择→{SetTagBit(“自动启动按钮”,1);}→确定。
按钮松开为“0”,设置过程:右键→属性→事件→按钮→鼠标→释放左键→右键C动作→删除大括号内容→在大括号内英文状态下键入{SetTagBit(“”,0);}→引号内容到窗口编辑动作中的变量选择→{SetTagBit(“自动启动按钮”,0);}→确定。如图7所示。

图7 自动启动按钮连接过程
单周期启动按钮、正常停止按钮连接方法与自动按钮类似。
其他各种开关,还有紧急停止按钮都是按左键是1,按右键是0。
(8)连接输出的显示变量,鼠标在画面上的传送带上,设置过程:右键→属性→属性→颜色→背景颜色→右键→动态对话框→鼠标点击表达式/公式右边按钮→选择变量→找传送带接触器变量Q4.0→确定→数据类型布尔型→真,绿色→假,灰色→事件名称→触发器→250ms→应用。如图8所示。
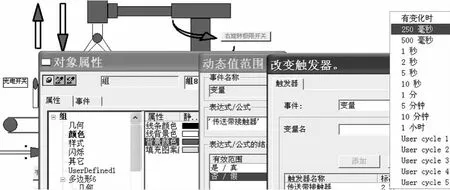
图8 连接输出的显示变量
其他输出显示变量连接方法类似传送带接触器。
(9)保存激活项目,做这一步之前要将程序下载到PLCSIM中,然后在所做的画面中,鼠标左键点击“保存”按钮,然后点击“运行系统”按钮。
经过一段时间装载后,将出现“WinCC运行系统”画面。通过鼠标按下自动启动按钮,传送带运行。然后用鼠标在画面点击操作,将信号“1”或“0”送到程序中输入变量,程序作用后,通过输出显示变量看到根据任务而进行的颜色变化,形象的看到运行过程。
5 系统联机调试
5.1 联机调试
断电,根据地址分配将真正PLC与实物模型接线,对接好的线检查,然后通电。双击 SIMATIC Manager→新建项目→取名字→插入对象→SIMATIC 300站点→硬件组态→编写程序→下载到真正的PLC中(不要打开 PLCSIM仿真器)→进行联机调试。
5.2 两地控制调试
两地控制调试过程:现场是一个地点,输入信号通过模型按钮和开关给出,经过PLC程序的作用,看到模型指示灯显示亮或者灭(灯亮表示工作,灯灭表示不工作),同时,在WinCC画面上看到颜色的变化。另一个地点,在WinCC画面中,用鼠标模拟开关和按钮操作,经过PLC程序的作用,看到画面输出的颜色变化,同时看到模型动作指示灯显示亮或者灭。
6 结论
通过采用PLC的机械手控制系统设计,提高了系统自动化程度,增强了系统可靠性,控制精度也大大增强。通过采用WinCC组态控制系统,提供较为清晰、直观、准确的机械手运行状态,进而为维修和故障诊断提供多方面的可能性,系统监控的应用能力和运行效率得到了大大增强。
[1] 王亮,李虹.PLC对机械手的定位控制[J].机械工程与自动化,2012,(4).
[2] 胡学林.可编程控制器原理及应用(第二版)[M].北京:电子工业出版社,2012.
[3] 胡学林.可编程控制器教程(提高篇)[M].北京:电子工业出版社,2005.
[4] 许志军.工业控制组态软件及应用[M].北京:机械工业出版社,2011.
猜你喜欢
中学生数理化·高一版(2021年1期)2021-03-19
计算机与网络(2020年18期)2020-10-26
电脑爱好者(2020年2期)2020-04-28
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
电脑爱好者(2017年22期)2017-12-04
制造技术与机床(2017年4期)2017-06-22
中学教学参考·理科版(2016年11期)2017-06-08
通信电源技术(2016年1期)2016-04-16
电脑爱好者(2016年6期)2016-04-01