
基于Catia 的数字化建模及在工程中的应用❋
2013-12-23 03:54李寒毅张海峰
机械工程与自动化 2013年3期
李寒毅,李 红,骆 群,王 玮,张海峰
(扬州大学 机械工程学院,江苏 扬州 225127)
0 引言
数字化建模技术在产品的设计制造中占有重要的地位,是产品开发的重要手段,随着三维设计软件的普遍使用,该技术已日渐成熟。
零件的几何模型既是工艺和数控编程等制造过程的基础[1],也是运动仿真的前提,同样是进行有限元等分析的必要条件。描述零件几何形状和尺寸的几何模型所表示的信息的完善与否,对后继工作有重要影响。
1 Catia环境下数字化建模的方法
对于不同的零件,设计者采用不同的建模方法和建模思路关系到零件数字化的过程,影响着产品的开发效率和产品的生命周期。对于使用Catia的设计者,其建模方法主要有以下几种:
(1)引用标准库零件建模:在机械设计中,有一部分零件已经被标准化,对这些零件进行单独建模不但繁琐,而且工作量大,利用率低,在Catia软件中,这些零件可以直接引用,从而节约建模时间,加快设计进度。
(2)系列化设计:产品的系列化设计实质上就是根据所需的性能参数,对零件的大小进行符合具体要求的修改[2]。
(3)正向设计:这是设计中使用最多的一种方法,一般是设计相关的尺寸,逐步建模,可以配合相关的二维软件如AutoCAD 等,也可结合工程图纸,完成从二维到三维的设计过程。
(4)参数化设计:就是将模型中的定量信息变量化,使之成为任意调整的参数,对于变量化参数赋予不同数值,就可得到不同大小和形状的零件模型。
(5)二次开发建模:Catia为了满足不同用户的使用需求,给用户预留了进行二次开发的接口,这些接口给用户提供了一系列开发工具,用以实现宏程序执行、几何形体生成等功能[3]。
(6)逆向工程:它是将实物转变为CAD 模型的相关数字化技术、几何模型重建技术和产品制造技术的总称,即将已有产品或实物模型转化为工程设计模型和概念模型,在此基础上对已有产品进行解剖、深化和再创造,是一种以实物(油泥模型)为基础产生三维数据的设计过程[4,5]。
2 复杂零件建模在工程上的应用
实际应用中,大部分的产品设计要用到以上建模方法的两种或两种以上,这样有利于零件建模的效率,以及减短产品开发的周期。其中用得最多的就是逆向工程结合正向设计的方法。下面以某一复杂智能温控执行器箱体(见图1)为例,来说明Catia环境下机械零件的建模过程。
2.1 建模零件结构分析
建模之前需先分析零件的结构,以避免结构及特征的反复修改。首先分析该执行器箱体的结构,掌握各特征的依附关系;然后,将零件分解成若干个简单特征,并依次建模;其次,选定一部分作为主体后,将建好的模型利用插入布尔操作添加到主体特征上;最后,在主体特征上补充细节特征,如孔、槽、凸台、加强筋等[6]。
由图1 可知,执行器箱体由4 个主要孔腔构成。该执行器箱体外部没有规则的面与体关系,内部有孔和槽等多种特征。完全用逆向无法做出细节孔、槽等特征,且无法完成二次设计;完全测绘,各孔的相对位置难以定位。为得到各孔腔的相对位置,可采取逆向工程的手法,结合正向设计为零件建模。

图1 执行器箱体实物
2.2 逆向设计过程
2.2.1 数据采集与处理
将执行器箱体外表擦干洗净后晾干,之后在其表面喷上均匀反光剂(执行器箱体表面比较光滑,易反光,用激光扫描时扫描不到点),晾干后再贴上定位点,置于3D 激光扫描仪的扫描位置(扫描处应以黑色作为背景)。
打开Catia软件后,进入Digital Shape Edit,首先对点云进行过滤处理[7],然后选择所有点云数据,将其整合并去除噪声点后得到的点云如图2所示。
2.2.2 坐标系变换
为方便操作,将整合后的点云的坐标系进行坐标变换。可将阀门的底面设为XOY 面,底面孔中心为原点,其法线方向为Z 轴,X 轴、Y 轴分别为两侧面的中心线投影到底面上的投影线,如图3所示。

图2 点云视图
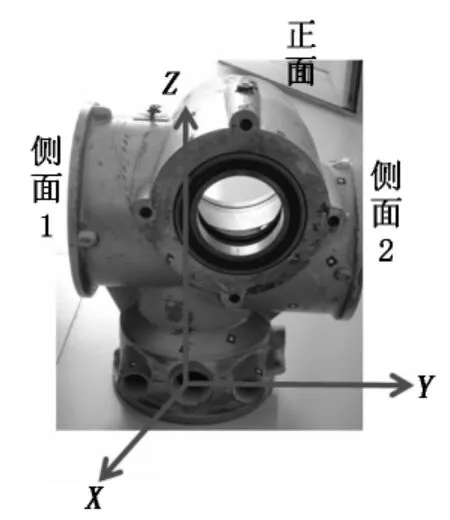
图3 零件系统坐标系
现取原整合点云,激活局部点云,其余的隐藏,用3DCurve将激活的点云最内部的点连接若干条直线,并依此创建平面1。利用上述直线的端点构造若干三点圆(越多越精确),然后取一圆心作为点云的原点;经过点云原点,并选择直线类型为曲面的法线创建直线,得到Z 轴,如图4所示。取其他两侧面垂直的孔腔底面,按同样方法可得到X′轴、Y′轴,将其投影到平面1即得到X 轴、Y 轴。单击insert→Axis system,相应地选择原点、X 轴、Z 轴,即得到点云与默认系统重合的坐标系[8,9],如图5所示。此后的设计将以变换后的点云为依据。
进入digital shape editor,选择mesh create,得到的网格曲面如图6所示。
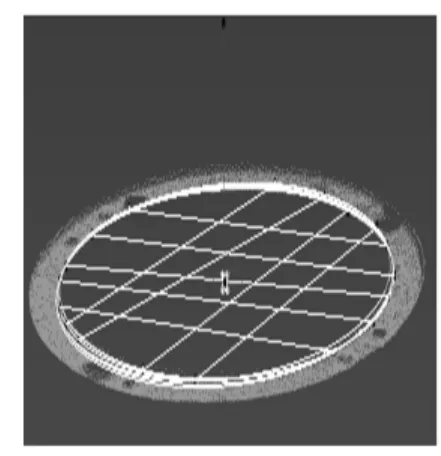
图4 Z 轴的创建

图5 系统坐标
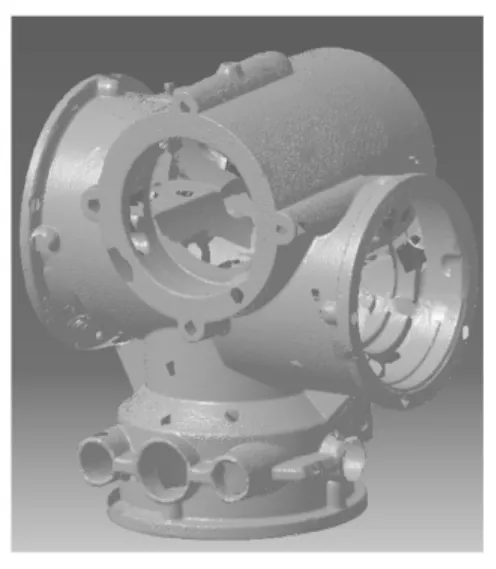
图6 网格曲面
2.2.3 箱体底部建模
由于零件复杂,点云扫描不全,建立网格面时很多细节丢失,因此,完全逆向可能得不得原模型。在逆向之后可以结合测绘或者正向设计建模。
首先选择Quick Surface Reconstruction模块,选择basic surface recognition,对网格曲面的底面部分进行曲面拟合。选取部分圆柱面为曲面,axis为(0,0,1),则得到底面圆曲线,加厚曲面即得底面圆台阶部分,如图7所示。

图7 零件特征创建过程
2.2.4 箱体主要腔体建模
其余各部分对有定位要求的特征采用以上方法,对不重要的特征可以测绘,也可以对原模型进行改进性设计,如螺纹孔的大小、位置,加强筋的厚度等。对以上各部分特征分开建模,以便修改,同时也可以对设计好的部分进行隐藏以减少干扰,依次可得到执行器各特征,如图8所示。
2.2.5 布尔运算
以上各部分分别建模好之后,需要将其组合在一个主体上。但是各部分的某些特征组合后并非所要的模型,需把多余的部分修剪掉。将重合的部分修剪后,选择底面部分为主体,进行布尔运算得到所要创建的智能温控执行器箱体模型,如图9所示。
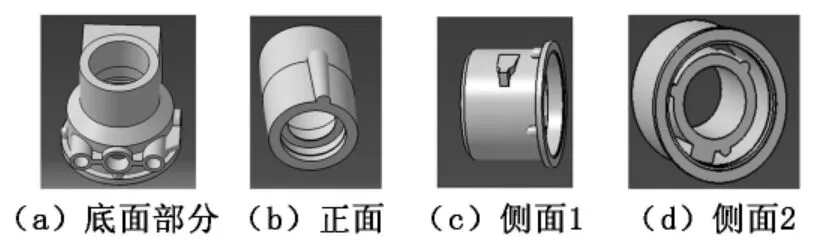
图8 执行器各特征
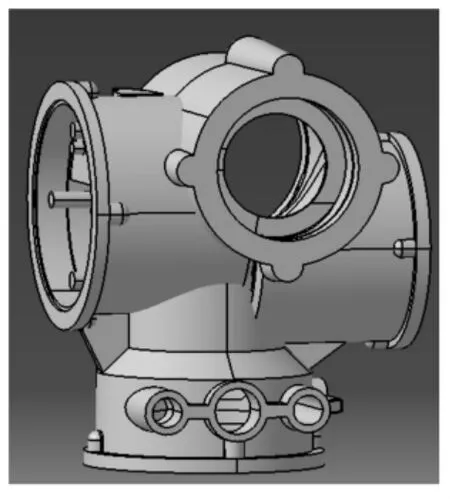
图9 执行器箱体模型
3 结束语
Catia广泛应用于航空、航天、汽车、船舶、电子等制造企业,其功能强大、精度高、建模方便等特点受到越来越多设计者的青睐。但是要真正能灵活、高效地运用Catia软件,还需要设计者不断地进行实践。本文在工程应用中总结了Catia软件的6种建模方法以及其应用场景,并以工程实例说明处理复杂不规则零件的建模问题,分析了建模思路和技巧,对设计者提高产品开发效率具有一定的借鉴作用。
[1] 任光胜,许香穗.CAD/CAPP 集成系统零件建模方法的研究[J].成组技术与生产现代化,1991(4):27-29,38.
[2] 许锦泓,谭建荣.实用的系列化零件建模方法[J].机电一体化,2000(6):47-50.
[3] Favre J M, Duclos F, Estublier,et al. Reverse engineering a large component-based software product//Fifth European Conference on Software Maintenance and Reengineering[G].[s.l.]:[s.n],2001:95-104.
[4] 冉险生,黄泽好.基于CATIAV5的ATV 曲面逆向设计[J].重庆理工大学学报(自然科学版),2010(4):55-58.
[5] Zhang X,Zhou Z.Reverse design and finite element analysis of tractor panel based on CATIA//2011Fourth International Conference on Intelligent Computation Technology and Automation[G].[s.l.]:[s.n],2011:162-165.
[6] 王小玲,陈书剑.基于Autodesk Inventor的复杂箱体零件建模探索[J].机械工程师,2009(19):59-60.
[7] 王忆望,李红.散热器面罩边框零件的逆向设计和曲面展开[J].扬州大学学报(自然科学版),2011,14(1):43-46.
[8] 胡海龙.CATIA V5R18基础设计[M].北京:清华大学出版社,2010.
[9] Szobonya L,Rennet G.Construction of curves and surfaces based on point clouds[J].Computer and Automation Research Institute Budapest,2000,11(4):11-57.
猜你喜欢
音乐天地(音乐创作版)(2022年1期)2022-04-26
测控技术(2018年12期)2018-11-25
中国铸造装备与技术(2017年6期)2018-01-22
制造技术与机床(2017年9期)2017-11-27
工业设计(2016年4期)2016-05-04
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
现代商贸工业(2016年35期)2016-04-09
专用汽车(2016年9期)2016-03-01
应用技术学报(2014年3期)2014-02-28
