
模态分析技术在摩托车振动改进中的应用
2013-12-23 04:40:16魏喜明白清祥周昌林
机械工程与自动化 2013年3期
魏喜明,白清祥,周昌林
(江门市大长江集团有限公司 研发中心,广东 江门 529030)
1 模态分析的定义和基本原理
1.1 模态分析的经典定义
将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。坐标变换的变换矩阵为模态矩阵,其每列为模态振型。模态分析的最终目标是识别系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。
1.2 模态分析的基本原理
首先考虑一下多自由度的动力学方程问题,设自由度数为n,则有:

其中:[M]、[C]、[K]分别为多自由度系统的质量矩阵、阻尼矩阵、刚度矩阵;{x(t)}、{x·(t)}、{x··(t)}分别为多自由度系统的位移向量、速度向量和加速度向量;{f(t)}为多自由度系统的受力向量。
然后对式(1)进行拉普拉斯变换,并且假定初始位移和初速度均为零,则得:

所以位移阻抗矩阵为:

在多维度动力学问题中,传递函数用下式定义:

将式(4)对照式(2)、式(3)可得传递函数矩阵为:

其中:adj([Z(p)])为[Z(p)]的伴随矩阵;|Z(p)|为[Z(p)]的行列式。显然,如果令:

则可以求得多个p 值,使得式(6)成立,而这些p 值就是系统极点,这些极点所对应的频率就是该系统的多种模态的固有频率。得到的多自由度系统模态的极点和共振频率参数如式(7)和式(8)所示:

其中:pr和p*r为多自由度系统的共轭极点;σr为模态阻尼衰减系数;ωdr为系统的有阻尼模态频率。ωdr的计算公式为:

其中:ωr为系统的无阻尼模态频率;ζr=σr/ωr为模态阻尼比。
模态分析技术的主要任务是找出结构中问题模态的频率和振型,通过对模态频率和振型的理解进行有针对性的改进,从而达到改善振动或降低噪声的效果,本文通过国内某车的振动问题案例来进行具体说明。
2 模态分析技术在某摩托车振动问题改进中的应用
2.1 问题的提出及诊断
国内某摩托车在开发过程中,评价部门提出其左、右脚踏有共振问题,主要是在4 500r/min附近右脚踏共振,5 500r/min附近左脚踏共振。该振动将影响整车的舒适性,必须加以立项改进。笔者根据反馈描述对该车左、右脚踏的振动进行测试,结果如图1、图2所示。
从图1、图2可以看出左脚踏在5 580Hz附近、右脚踏在4 440Hz附近各有一个比较明显的振动放大,这是一个典型的共振问题。需分析该共振的主要共振频率,并对其模态特征进行调查。
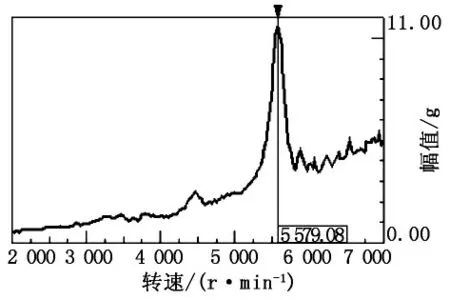
图1 左脚踏振动测试测试结果
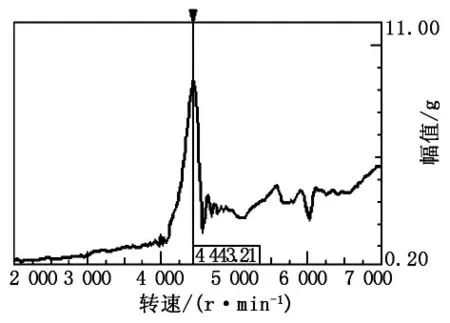
图2 右脚踏振动测试测试结果
2.2 频谱分析
对测得的数据进行阶次分析,分别如图3、图4所示。

图3 左脚踏频谱分析

图4 右脚踏频谱分析
由图3可知,左脚踏5 580r/min附近的共振模态是由发动机的2阶激励激发出来的,该模态的特征频率为186 Hz。由图4可知,右脚踏4 440r/min附近的共振模态也是由发动机的2阶激励激发出来的,该模态的特征频率为147Hz。
2.3 模态锤击实验验证
采用模态锤击法实验测试装配状态脚踏结构的共振频率,如图5所示。
通过锤击法模态实验找到了上述左、右脚踏的两个模态频率,印证了频率诊断中的模态的确存在。

图5 关于装配状态脚踏特征频率的模态实验
2.4 用CAE软件进行模态分析
边界条件:约束安装螺栓孔;网格类型:采用2阶Tetra单元;材料属性:采用橡胶和钢两种材料混合建模,分析结果如图6、图7所示。

图6 CAE模态分析一阶模态计算结果
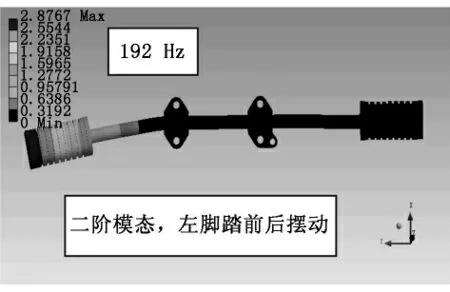
图7 CAE模态分析二阶模态计算结果
2.5 模态结果误差分析
对实验模态与计算模态结果进行误差分析,如表1所示。由表1可知,实验模态结果与CAE 计算模态结果非常接近,误差在2%左右,分析结果可靠,可以作为改进方案的依据。

表1 实验模态结果与计算模态结果误差分析
2.6 改进方案及其测试验证
根据上述CAE 模态计算结果对两只脚踏杆的前、后方向进行了有针对性的改进,改进后的振动测试结果如图8、图9所示。
采用改善方案后,评价部门进行了评价,认为改进方案的振动问题可以接受,该车振动问题得以解决。
3 总结
本文介绍了模态分析的基本原理,通过某摩托车开发中振动问题的解决流程阐述了其应用方法。在此案例中,采用了模态实验、振动信号频域诊断与CAE模态分析技术相结合的方法,解决了该车的左、右脚踏振动问题,为今后解决此类问题提供了新思路。

图8 左脚踏改进前、后振动对比

图9 右脚踏改进前、后振动对比
[1] 庞剑,谌刚,何华.汽车噪声与振动:理论与应用[M].北京:北京理工大学出版社,2006.
[2] 马大猷.噪声与振动控制工程手册[M].北京:机械工业出版社,2006.
猜你喜欢
科学大众(2023年17期)2023-10-26 07:39:14
天天爱科学(2020年6期)2020-09-10 07:22:44
知识经济·中国直销(2018年12期)2018-12-29 12:22:12
当代陕西(2018年12期)2018-08-04 05:49:22
数学物理学报(2017年6期)2018-01-22 02:26:40
纺织科学研究(2017年4期)2017-05-17 03:59:56
湖北经济学院学报·人文社科版(2015年8期)2015-12-29 05:53:07
上海电机学院学报(2015年4期)2015-02-28 14:30:00
中国卫生(2014年9期)2014-11-12 13:02:06
计算物理(2014年2期)2014-03-11 17:01:44
