
脊柱椎弓根动态稳定系统的研制与评价
2013-12-18 02:01,,
生物医学工程学进展 2013年2期
, ,
上海微创骨科医疗科技有限公司(上海,201318)
脊柱是人体直立的基石或支柱,它独特的结构和功能(灵活性、稳固性和动力平衡)使得人类成为地球上进化最完善的物种[1]。腰椎管狭窄症(Lumbar spinal stenosis,LSS)由Verbiest[2]最早提出,其症状为两侧神经根痛(Bilateral Radicular Pain)、神经源性间歇性跛行(Neurogenic Intermittent Claudication,NIC)以及下肢麻木等,是一种可致残疾病,通常见于中老年人群。脊柱融合(Fusion)是现代脊柱外科的通用技术,这种坚强融合固定手术是目前为止脊柱外科手术的“标准”,但在很多病例中,成功的融合术却无法保证疼痛的完全缓解,即使融合术有效,绝大多数外科医生却认为成功的融合术增加了邻近节段病变的发生几率[1]。融合腰椎上下邻近节段的退变发生率在25%~45%之间[3-6]。因此,人们都在努力寻找各种非融合技术作为融合技术等终极外科治疗前的一种替代、补充或过渡性外科治疗,以达到对患者实施“阶梯型”和“个体化”的新型治疗模武。当前,国外已出现一些脊柱动态稳定装置,用于治疗由椎管狭窄引起的神经源性跛行等腰椎疾病。Dynesys[7-9]系统是1991年,Zimmer Spine 研制的, 1994产品进入市场开始应用。到目前为止,全球已经完成该手术有13 000例[8]。Dynesys系统使重新恢复了脊柱的序列和稳定性,抑制了其过度活动。BioFlex应用镍钛记忆合金弹簧棒椎弓根动力稳定系统治疗退变性腰椎疾病,这是韩国研究的成果。,2年随访显示[10],该稳定系统是具有可屈曲性和足够的后路脊柱支撑,可以起到动态稳定的功能,并能够减轻术后邻近节段的退变。虽然这些新型装置在长期临床有效性方面还没有一个较为明确的定义,但它正如所有创新性技术一样,其初、中期临床效果令人相当满意。为此,我们也自主发明设计了一种脊柱动态连接棒(专利号:201110041369.3 )。本文通过对该脊柱椎弓根动态稳定系统进行各项性能的测试,验证其既具有给予病变节段以足够的稳定,又有使该节段保留一定的活动度,这样可以减轻术后邻近节段的退变。
1 材料与方法
1.1 脊柱椎弓根动态稳定系统的设计
整套系统全部采用钛合金(Ti6Ai4V)。包括动态棒、椎弓根钉(定向钉和万向钉)、压紧螺母组成(如图1)。该系统结构简单,安装方便,具有前屈、后伸、扭转等脊柱生理活动的功能,并且还有减震效果。产品表面采用阳极氧化工艺,提高产品与人体的生物相容性。
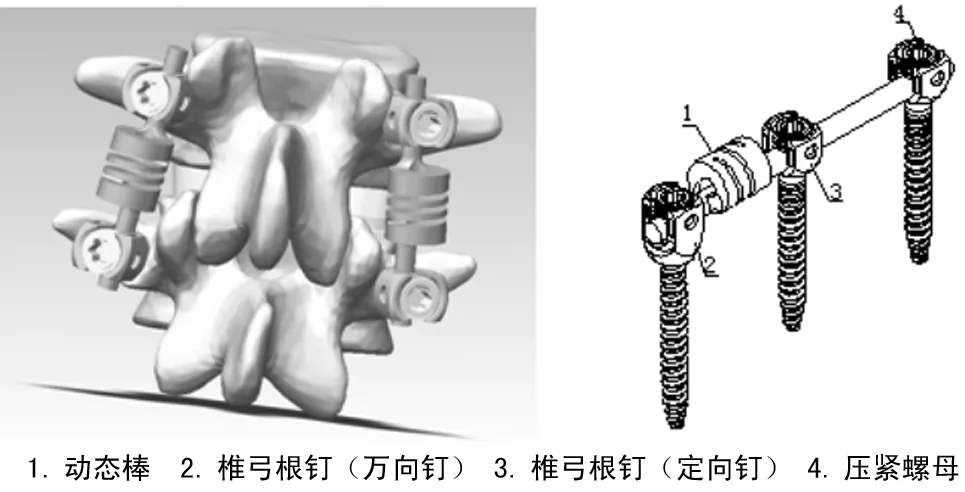
图1 组装的脊柱椎弓根动态稳定系统Fig.1 Assembly of spinal dynamic stabilization system
2 有限元分析(不同设计在轴向载荷下的有限元分析)
2.1 方案和建模
有限元分析共考察五种设计方案,根据F1717要求,将椎弓根钉和动态棒装载于标准力学实验工装上,在聚乙烯块辊轴处加载垂直向下的固定位移载荷时,动态棒上的应力分布和变形情况。力学实验工装模型如图2所示。

图2 力学实验工装模型Fig.2 Test fixture model
将设计方案分为5种模型:动态棒Ⅰ型、动态棒Ⅱ型、动态棒Ⅲ型、动态棒Ⅳ型(在Ⅱ型基础上参数优化)、动态棒Ⅴ型(在Ⅲ型基础上参数优化),见图3所示。

图3 动态棒Fig.3 Dynamic Rod
2.2 有限单元化
有限元分析的前处理在Hypermesh10.0中完成。对所有部件行4面体网格划分,单元类型为4节点C3D4一阶单元,椎弓根钉结构作简化,椎弓根钉和聚乙烯块之间、椎弓根钉和动态棒之间的网格作共节点处理,模拟实际实验工况中的紧固作用。如图4所示。
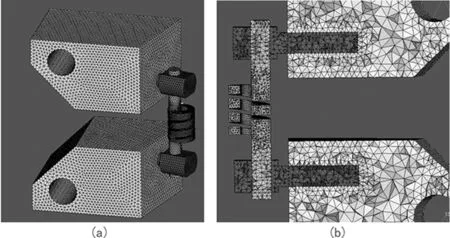
图4 实验装置网格模型Fig.4 FE model of the test fixture
动态棒网格设置,在于椎弓根钉结合部位网格设置相对稀疏,网格平均边长约为0.8mm,而在弹性结构即重点关注部分网格细化,平均边长小于0.3mm。如图5。

图5 动态棒网格局部细化Fig.5 Local mesh refined of dynamic rod
2.3 材料
本实验装置中包括聚乙烯材料的垫块和Ti6Al4V的动态棒和椎弓根钉。
2.4 边界条件和载荷
为了模拟真实实验情况,对装置有限元模型做如下边界条件和载荷设置。对上下下方聚乙烯块辊轴穿过的孔面上的节点,分别同对称面上该孔圆心,做节点耦合。
对下方聚乙烯块的耦合Dependent node设置在XYZ轴方向上平移约束为0,XZ轴上的旋转约束也为0,模拟辊轴穿过以及整个装置对称的情况。
对上方聚乙烯块的耦合点,设置在XY轴方向上平移约束为0,Z轴方向上设置向下18mm作为位移载荷(18mm为上下聚乙烯块最近点距离),模拟实验中将上下聚乙烯块压缩靠近的情况。
2.5 有限元结果
分别比较了5种动态棒设计在固定下压位移情况下的植入物上最大米塞斯应力,以及在此位移下的轴向承载能力,具体比较如表1所示。

表1 各种动态棒最大应力与承载负荷Tab.1 Various dynamic rod the maximum stress and bearing load
2.6 讨论
2.6.1在固定下压位移下,动态棒上的最大米塞斯应力反映了动态棒的弹性和安全系数,而轴向承载能力反映了动态棒的刚度,这两种性能互成反比。动态棒作为脊柱后路固定的一种选择,应该在允许手术节段活动的同时,也具有一定刚度以获得足够椎间减压,因此,动态棒设计应该根据需求在两种参数中做出平衡选择。
2.6.2根据仿真结果,动态棒Ⅰ型最大应力已经超过钛合金拉伸/压缩极限,因此此时材料应该已经发生屈服或者破坏,在这种工况下结构安全性为:
动态棒Ⅰ型 < 动态棒Ⅱ型 < 动态棒Ⅲ型
2.6.3轴向支撑能力,则是动态棒Ⅰ型 > 动态棒Ⅱ型 > 动态棒Ⅲ型。
2.6.4对于结构优化后的比较,结合分析结果可以发现,通过对螺旋内槽处倒圆角可降低结构上最大应力,使载荷在结构上的分布更加均匀,增加结构安全性,提高疲劳性。因此对动态棒内槽处倒圆角设计是必要的。
3 物理性能验证
3.1 系统整体静态压缩性能
3.1.1接受指标:根据ASTM F1717制作工装,在下压8mm或者至测试块前端接触后动态棒仍能恢复原状不变形。
3.1.2选样原则:worst case:承受相同载荷时,刚度越大,其弹性位移越小,因此选择刚度大的产品进行测试。
3.1.3测试数量:6组
3.1.4测试方法:按ASTM F1717规定的进行。
3.1.5测试结果:合格
在实验过程中,设置压缩位移为8.0mm时,系统仍处于弹性变形阶段,卸载后产品将恢复原状,见图6。
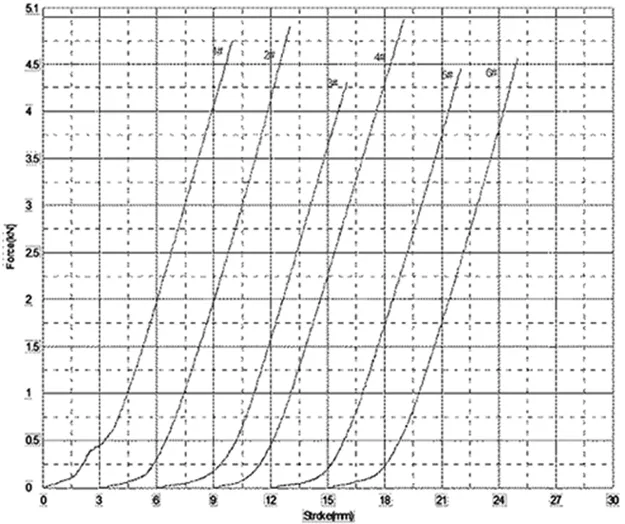
图6 压缩曲线Fig.6 Compression curve
3.2 系统整体静态扭转性能
3.2.1接受指标:根据ASTM F1717制作工装,扭转2.1°后动态棒稳定系统仍可以恢复原状。
3.2.2选样原则:worst case:承受相同载荷时,刚度越大,其弹性位移越小,因此选 择刚度大的产品进行测试。
3.2.3测试数量:2组/10-50;3组/12-50
3.2.4测试方法:按ASTM F1717规定的进行。
3.2.5测试结果:合格,见图7、图8。

图7 2组扭转曲线Fig.7 Two groups reverse curve

图8 3组扭转曲线Fig.8 Three groups reverse curve
3.3 系统整体压缩疲劳性能
3.3.1接受指标:根据IOS12189要求制作工装,在上压辊上加载2000N循环载荷,循环1000万次后产品仍然不断裂。
3.3.2选样原则:worst case:按照ISO12189的要求进行测试,实验过程中使用3个弹簧,单个弹簧的刚度为375N/mm,而根据动态棒自身的压缩性能,可知动态棒轴向刚度较弹簧低或相当,同时考虑加载方式,弹簧承受了较多的载荷。因此,当加载一定的载荷时,整体位移基本一致,因此,选择刚度较大的产品进行试验。
3.3.3测试数量:4组
3.3.4测试方法:按IOS12189规定的进行。
3.3.5测试结果:合格,见表2。
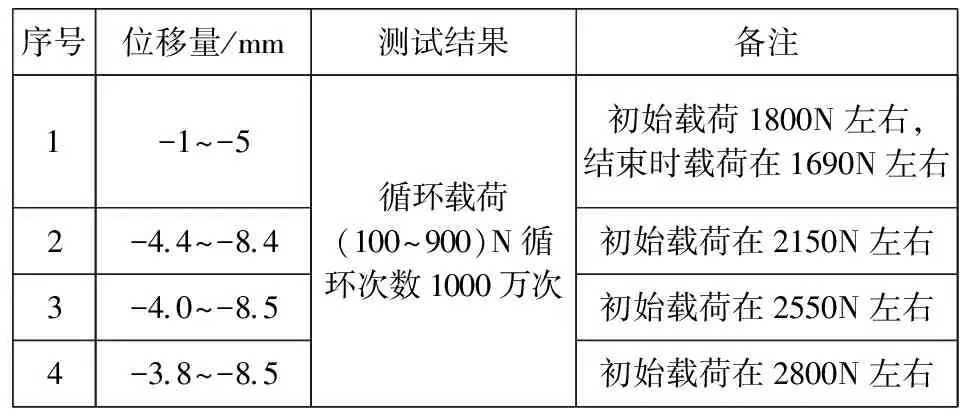
表2 压缩疲劳测试结果Tab.2 Compression fatigue test results
4 结果
4.1 有限元分析
动态棒有限元分析显示,通过调节螺旋槽宽度和螺距,可以调节动态棒刚度,但是随着动态棒柔韧性变好,系统的轴向承载能力则会降低,因此动态棒设计应根据需求选择合适的设计参数。另外,分析显示,槽边缘增加圆角特征可以有效减小植入物上应力集中现象,而不会显著降低系统刚度
4.2 物理性能验证
4.2.1系统整体静态压缩性能 合格
在下压8mm或者至测试块前端接触后动态棒仍能恢复原状不变形。
4.2.2系统整体静态扭转性能 合格
扭转2.1°后动态棒稳定系统仍可以恢复原状。
4.2.3系统整体压缩疲劳性能 合格
在上压辊上加载2000N循环载荷,循环1000万次后产品仍然不断裂。
5 结论
通过对脊柱椎弓根动态稳定系统各项性能指标的验证,结果是有限元分析、物理性能测试均达到预设标准,由此可认为,该系统既具有给予病变节段以足够的稳定,又有使该节段保留一定的活动度,这样可以减轻术后邻近节段的退变。
本设计主要的实现方式是:连接棒和椎弓根螺钉固定后,依靠连接棒的刚度提供脊柱的即刻稳定性,同时,连接棒的弹性部分又可以提供脊柱一定范围的活动度,保持正常脊柱的生物力学环境,防止邻近节段因坚强固定而导致的过度载荷,从而防止了邻近节段的退变。整个发明旨在恢复椎间高度,减少脊神经压力,提供脊柱稳定性的同时,保持脊柱的正常旋转中心,提供治疗后的微动,降低邻近节段退变的可能性。
脊柱动态稳定技术允许手术节段的脊柱维持一定方向的活动功能,限制了某些方向的活动功能,更符合生理稳定。另外,人体负荷在植入物和脊柱之间分担,可以防止连接处破坏,对邻近节段椎间盘内的应力和运动没有影响;一旦获得正常运动和负荷传递,可促进早期退变的椎间盘自我修复,或结合一些生物治疗方法促进椎间盘自我修复。以往的脊柱动态产品,已获得了较好的临床效果,该技术消除了融合手术和全椎间盘置换并发症的风险。在去除疼痛、患者满意度和较低的与植入物相关并发症方面,非融合固定的初、中期效果是令人满意的。尽管还没有长期结果,考虑到前期临床结果,预计此技术可以成为治疗退变腰椎的安全的一线手术方法,这也符合当今脊柱非融合功能重建发展趋势。
[1] James,J.Y. Motion Preservation Surgery of the Spine-Adbanced Techniques and Theory. [M].Singapore: Elsevier (singapore) Pte Ltd. 2008: 1-208.
[2] Verbiest, H., A radicular syndrome from developmental narrowing of the lumbar vertebral canal[J]. J Bone Joint Surg Br, 1954, 230-237.
[3] Aota Y, Kumano K, Hirabayashi S. Post-fusion instability at the adjacent segments after rigid pedicle screw fixation for degenerative lumbar spinal disorders[J]. J Spinal Disord 1995,8 (6):464-473.
[4] Nachemson AL. Disc pressure measuremens[J]. Spine ,1981,6:93-97.
[5] Penta M, Sandhu A,Fraser RD. Magnetic resonance imaging assessment of disc degeneration 10 years after anterior lumbar interbody fusion[J]. Spine 1995;20(6):743-747.
[6] Rahm MD, Hall BB. Adjacent-segment degeneration after lumbar fusion with instrumentation: A retrospective study[J]. J Spinal Disord 1996;9(5);392-400.
[7] Niosi CA,Wilson DC,Zhu Q,et al. The effect of dynamic posterior stabilization on facet joint contact forces: an in vitro investigation.Spine, 2008 Jan 1;33(1):19-26.
[8] Meyers K,Tauber M,Sudin Y,et al.The use of instrumented pedicle screws to evaluate load sharing in posterior dynamic stabilization systems[J]. Spine,2007 Nov 22.
[9] Bothmann M,Kast E,Boldt GJ,et al.Dynesys fixation for lumbar spine degeneration[J].Neurosurg Rev 2008,31(2):189-96. Epub 2007 Sep 29.
[10] Kim Youngsoo , Zhang Hoyeol ,Moon Byungjin ,et al. Nitinol spring rod dynamic stabilization system and nitinol memory loops in surgical treatment for lumbar disc disorders: short-term follow up.Neurosurg Focusc 2007c22(1):E10.
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
广东医科大学学报(2020年4期)2020-08-24
中国医药指南(2019年27期)2019-10-22
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年5期)2016-05-17
卫生职业教育(2014年24期)2014-03-19
中国中医药现代远程教育(2014年20期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01
城市道桥与防洪(2014年6期)2014-02-27
城市道桥与防洪(2013年10期)2013-03-11
