基于ANSYS/LS-DYNA的移动式压力容器动态碰撞仿真分析
2013-12-18 02:24,,
石家庄铁道大学学报(自然科学版) 2013年4期
, ,
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
0 引言
随着我国国民经济的快速发展以及现代工业的快速成长,气体产品种类越来越丰富,气体工业加速发展,加上世界制造业的调整,移动式压力容器的装备制造中心也正迅速崛起并向中国转移。移动式压力容器所具有的装载量大、运输手段灵活和运输成本低廉的特点,逐步发展成为运输工业气体的主力,并在我国国民经济发展过程中起着重要的作用。移动式压力容器储运的介质绝大多数都属于易燃、易爆等有害液化气体,如果引发安全事故,不仅造成财产损失,也容易污染环境甚至造成人员伤亡,社会影响极其恶劣。
国内外在移动式压力容器的研究主要集中于压力容器的无损探伤、优化设计、运输车的静强度分析、罐体内部防波板的静强度设计以及防波性能等方面,对移动式压力容器运输车的整体动态追尾碰撞的研究尚属空白,主要由于其整体建模非常复杂,瞬态动力学响应分析的计算量过于庞大,造成很多人心有余而力不足,面对本课题无从下手。本文重点针对HGJ9403GYQ型半挂运输车满载时在运行状态下被后方车辆以60 km/h的相对速度追尾的情况作分析。由于移动式压力容器及其运输车的模型非常复杂,故使用Solidworks完成其三维实体模型的建模,巧妙利用Solidworks与Workbench的接口将模型无缝导入,得到三维有限元模型,并根据实际运行状态做适当精简和换算后将仿真条件加载,用LS-DYNA对其进行运算,最后在LS-PREPOST中观察仿真结果。仿真流程如图1所示。本研究创造性地利用了各软件间的兼容性,将仿真做到简单、高效、所有数据精确无误,并且为该型半挂运输车后续设计制造提供理论依据,给同行在实验数据和仿真方法上提供参考。

图1 碰撞仿真流程图
1 建立Solidworks三维模型
Solidworks作为一款三维实体建模软件,具有功能强大、易学易用等特点,可以胜任复杂模型的建立,相比在ANSYS Workbench中更加具有灵活性和可操作性。通过Solidworks对移动式压力容器运输车进行实体建模,先建立零件模型,最后进行装配,得到整体模型如图2所示。
2 有限元模型的建立
2.1 模型简化
由于移动式压力容器运输车的模型非常复杂,为加快其有限元分析的速度,需要按以下原则进行化简[1]:(1)总体简化。分析主要集中在压力容器以及与之关联的螺栓和车架,不考虑车头以及轮胎的受力情况,故可在保留其对压力容器的有效载荷的情况下将其化简;(2)零件简化。在不影响计算结果的基础上,对压力容器非直接碰撞部位的零部件进行适当简化;(3)微小特征简化。对模型中不重要的零部件上的小孔、圆角、倒角等特征进行适当简化,对关键部位的特征则进行了保留。将简化后的模型导入到ANSYS Workbench中,如图3所示。

图2 移动式压力容器运输车三维模型 图3 简化的三维模型
2.2 材料机械性能
模型中,压力容器的材料为16MnR,车体及相关附件的材料为45钢,表1列出了相关材料的机械性能[2]。

表1 材料的相关参数
2.3 接触设置
移动式压力容器的许多零件间的接触都是面面接触,故需要建立接触对,在接触对中指定接触面和目标面时需要按照一定的原则设置[3]:网格较细的面设为接触面,较粗的设为目标面;凸面设为接触面,凹面设为目标面;面积小的面设为接触面,大面设为目标面;比较软的面设为接触面,比较硬的设为目标面。依此方法设置接触,使其接近实际条件。
2.4 网格划分
模型的网格划分是有限元分析的重要环节,其网格的质量好坏直接影响计算结果的准确性。本文综合利用了自由划分、四面体网格、六面体网格主导、扫掠以及多区扫掠的方法,利用全局网格控制和局部网格控制,并综合手动控制和自动网格来划分,以便达到预期的网格化模型。模型整体都遵循先简单后复杂,先划小零件、后划结构件,先局部后整体的原则,并以Mesh Metric的统计数据反复修改各个零部件的网格参数,不断提高网格质量,以保证网格的最优化。相对于ANSYS传统的手动划分网格,更加易于控制网格的划分走向,同时对于自动划分网格的方法,更易于控制网格的划分质量,将模型的网格基本全部划成优质网格,从而极大地减少了畸形网格的数量,提高了精度,在网格化模型的过程中将耗时和质量都达到最优状态,使以往因为模型过于复杂而不能进行的仿真成为了可能。网格化的模型中,四面体单元占多数,六面体单元次之,极少数的五面体单元,其中压力容器罐体部分采用的是壳单元,在不影响计算精度的情况下,可以显著提高计算速度。
2.5 边界条件与载荷
仿真主要是模拟移动式压力容器运输车遭受60 km/h相对速度的车辆追尾后,容器、车体和连接螺栓等的受力情况,不关心追尾车辆的受力变形情况,故将其简化成一个5 000 mm×3 500 mm×110 mm,质量为15 t的质量块,可以显著加快计算速度。
由于模型中已将车头及轮胎化简,为减小仿真误差,需将其质量及摩擦力附加在模型中[4-5]。摩擦力和惯性力产生于碰撞瞬间、运输车状态发生改变的时刻,故可以统一换算成阻力。后轮与地面的阻力F1和前方牵引销处的阻力F2可表示为
F1=uMcg
(1)
F2=u(m11+m3)g
(2)
式中,u为轮胎与路面间的滑动摩擦系数,取值0.7;Mc为运输车在后轴上分布的质量总和;g为重力加速度,9.8 m/s2;m11为满载罐体分配在牵引销上的质量;m3为车头的质量,参数提供为5 990 kg。已知
Mc=(M-m1-m2)+m12
(3)
L=(m0-m2)/m1
(4)
m11=m1L
(5)
m12=m1-m11
(6)
式中,L为重心距左封头的相对位置;M为满载整车质量,参数提供为40 000 kg;m0为牵引销的载荷,参数提供为16 100 kg;m1为满载罐体质量,参数提供为35 610 kg;m2为牵引销的质量,参数提供为592 kg;m12为满载罐体分配在后轴上的质量;将式(3)~(6)带入式(1)和式(2)中,计算得:F1=164 077 N;F2=147 353 N。
将得到的载荷分别施加在车体后梁和前方牵引销处,对后方的质量块施加16.67 m/s的初始速度,方向正对压力容器轴线,且质量块相对压力容器上下、左右对称,并保证满载时内部压力为2.16 MPa。
2.6 求解过程控制
在进行输出以前,还要设置相关的求解控制参数,包括计算时间控制(设为100 ms)、输出频率、沙漏控制类型、沙漏系数以及缺省设置。由LS-DYNA EXPORTE模块输出K文件,打K文件设置内存空间,以及为提高计算速度而适当进行质量缩放[6]的修改。设置K文件中的参数需要具有一定的理论基础,难度比较大,但是正确的设置会大大提高求解效率,缩短仿真时间,将复杂的仿真模型快速求解。
3 有限元分析及结果处理
3.1 有限元求解
瞬态动力学仿真软件LS-DYNA是专门用于求解各种二维、三维的非线性结构的高速碰撞、爆炸和金属成型等非线性动力学问题的,具有广泛的好评和极高的可靠性[7]。将K文件输入LS-DYNA中进行运算,并将得到的数据文件导入到LS-PREPOST中查看仿真结果。相比于在Workbench中直接求解,LS-DYNA在求解超大型碰撞模型时占用的资源更少、资源利用率更高、求解速度更快,中途由于K文件设置不当可停止纠错后重新启动分析,不会造成前面的计算全部浪费;另外,由于可直接操作K文件,可人为控制求解参数的设置与读取,极大地方便了后期数据的处理,而在Workbench的界面操作中,操作更加简单但很难达到这样的预期效果,得到的结果往往并非是计算所需求的。
3.2 结果分析
3.2.1 车体受力分析
在LS-PREPOST中可以即时查看动态碰撞的受力和变形情况,按预先设置好的时间步逐步分析碰撞对移动式压力容器运输车造成的整体和关键部件的影响。图4为碰撞结束时的整体状态图。
从图4可以明显看出,车体的变形较大,特别是罐体与车体的连接螺栓变形很严重。图5所示为车体及螺栓在碰撞结束后的整体应变图,车体后方单元32047受撞击后材料内部应力高达6.56 GPa,很明显已经失效。观察车体,碰撞发生后车体变形严重,其内部应力整体均远超屈服极限,可以断定车体此时已经报废。

图4 碰撞后的整体状态 图5 车体碰撞应变图
连接车体与压力容器的连接螺栓的受力变形从图5上也可以看出非常严重。在遭受碰撞后,螺栓的响应是基本一致的,取如图5所示的两个位置的螺栓作分析,得到其前20 ms的应力曲线图,如图6、图7所示。观察可知其应力曲线虽然存在差异,但是整体却非常相似,都在5 ms左右达到了屈服强度355 MPa,并随着碰撞的进行应力逐步增大最后发生失效。并且由于左右两侧螺栓应力的差异导致了车体在碰撞后有侧倾的倾向。
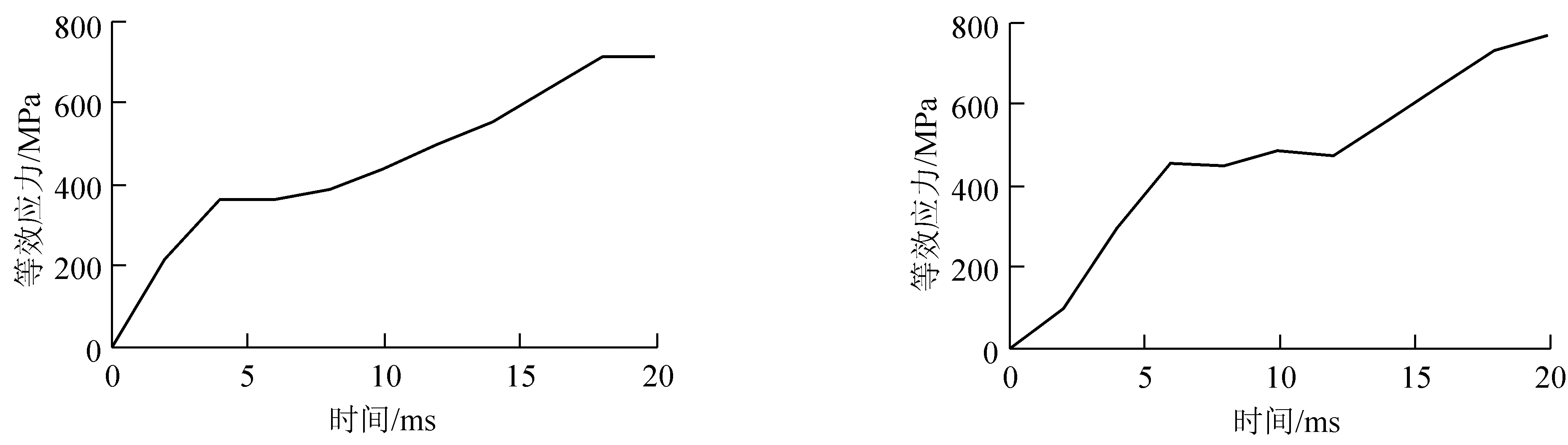
图6 左1号螺栓应力图 图7 右1号螺栓应力图
3.2.2 牵引销受力分析
牵引销是负责连接车头和压力容器运输车的部件,顶部与压力容器焊接,下方插销插于车头的牵引基座内。图8即为牵引销在后方追尾发生后,在碰撞冲击作用下的应力云图,主要以等效应力为主,单元8547碰撞瞬间的最大应力为345 MPa,非常接近屈服强度。图9为牵引销应力最大单元8547整个碰撞过程的应力曲线。从应力曲线也可以看出只有一个瞬间达到了345 MPa,其平均应力在250 MPa左右,均没有超出材料的屈服强度,该牵引销在承受冲击载荷后可能降低其使用年限,但不会在短时间内失效。

图8 牵引销应力云图 图9 牵引销应力曲线
3.2.3 容器受力分析
由于压力容器内部满载,压力高达2.16 MPa,在车体尾部保险杠抵消了部分冲击载荷后才遭受碰撞,因此碰撞对压力容器造成的变形较小。压力容器整体的应力如图10所示,压力容器罐体中段上的最大应力单元号为227 074,并对该单元的应力进行绘图,如图11所示。由应力图解可以看出,曲线非常符合实际情况,撞击所带来的冲击载荷在罐体上形成振荡,罐体上的单元应力有形成振荡,随着时间的振荡逐步衰减,趋于稳定。罐体所受最大应力峰值为217 MPa,远没有达到破坏极限345 MPa,可以认为该罐体的强度可以满足实际生产的使用要求。

图10 压力容器整体应力云图 图11 罐体最大应力单元的应力曲线
压力容器的变形主要集中在右封头上,左封头没有受到直接的碰撞无明显变形。右封头的变形程度不大,由于受到内部压力的限制,其变形也受到一定的阻力,导致形变不是很严重,中心凸台只向内部最大位移58 mm。右封头由于发生直接碰撞,开始后产生的最大等效应力时刻的等效应力如图12所示。碰撞带来的冲击应力对右封头的应力影响非常严重。由于是满载情况,造成的形变不很明显,但是应力却比较大,应力达到了424 MPa。根据应力单元的位置可以知道其发生在中心凸台的周边,所以在内部满载的情况下极有可能造成裂缝并泄漏,因此需要将此处的结构加强,以满足安全的需要。
3.2.4 组合支座分析
压力容器支座是在主梁上支撑罐体的主要部件,将支撑垫板、支座和连接块作为一个焊接组合体来考虑在观察各部件变形的同时也可观察到焊接部位的受力情况,方便对整体的把握。图13所示的是追尾车辆与车架开始碰撞瞬间组合体整体的应力云图,经过观察碰撞动画与应力的动态关系,发现组合体此时所受的应力是最大的,故主要研究组合体此时的应力形变。

图12 右封头等效应力云图 图13 组合支座的应力云图
分析得知,该图的最大应力为916 MPa,发生连接块与连接螺栓的连接处,单元305 461即表示此时最大应力的地方。统计分析发现所有连接块与连接螺栓处的受力都在880 MPa左右,考虑到它们的应力状况,螺栓被拉断对连接块造成的影响是比较严重的,需要进行适当加强或改善设计。另一侧的支座受力和变形情况与此极为相似,只是有略微的不同,故不再赘述。
4 结论
综合应用Solidworks、ANSYS/Workbench、LS-DYNA、LS-PREPOST对移动式压力容器运输车进行了整体建模和三维有限元动态碰撞仿真,分别得到了车体、压力容器、连接螺栓及主要结构件的应力响应,仿真结果表明,车体承受了碰撞的绝大部分冲击,并且产生了严重变形,承担连接罐体与车体的连接螺栓也全部失效,但它们对碰撞产生了有效的缓冲,在很大程度上保护了压力容器不受致命性的损坏,也很好地保证了周边环境的安全。压力容器罐体的右封头变形相对较为严重,在满载的情况下造成裂纹并泄漏气体的可能性较大,因此在后续的设计制造中应适当加强右封头的抗冲击强度和焊接强度。压力容器罐体和左封头没有受到直接的撞击,故安全性相对较高。本课题对移动式压力容器运输车的整体都做了全面的仿真,并逐一分析了各个构件的受力响应和变形情况,所有实验参数均已得到并证实基本符合实际情况,仿真目的全部达到。
本次仿真采用了不同于以往的全新的仿真方法,主要通过各仿真软件之间的协调,将仿真巧妙地分为4个阶段,每个阶段都采用最擅长的软件来进行处理,各软件的优势得到充分发挥,同时也使本仿真得以顺利进行。事实证明,这种仿真手段的应用可以极大的提高设计效率,节省人力物力,为今后同行进行类似的仿真提供了有利的参考。
参 考 文 献
[1]钟自峰.基于Workbench的全液压凿岩钻机有限元分析[J].煤矿机械,2012,33(11):84-86.
[2]国家标准化管理委员会.GB150—2011 压力容器[S].北京:中国质检出版社,2011.
[3]张洪才,何波.有限元分析——ANSYS 13.0从入门到实战[M].北京:机械工业出版社,2011:267-278.
[4]马睿,胡晓兵,万晓东.基于ANSYS的小型机器人小臂的有限元静态分析[J].机械设计与制造,2012(9):4-6.
[5]高健峰.某电子产品仿真架ANSYS有限元分析[J].兰州交通大学学报,2012,31(3):146-148.
[6]白金泽.LS-DYNA3D理论基础与实例分析[M].北京:科学出版社,2005:167-174.
[7]杨玻.基于ANSYS/LS-DYNA的铜板矫直有限元分析[J].宁波职业技术学院学报,2012,16(2):73-76.
猜你喜欢
橡塑技术与装备(2021年6期)2021-03-19
中国特种设备安全(2019年10期)2020-01-04
模具制造(2019年7期)2019-09-25
电子制作(2019年15期)2019-08-27
电子制作(2017年17期)2017-12-18
专用汽车(2016年9期)2016-03-01
专用汽车(2016年4期)2016-03-01
肿瘤预防与治疗(2015年1期)2015-09-26
专用汽车(2015年1期)2015-03-01
中国交通信息化(2014年3期)2014-06-05