
瞄准式战斗部双向瞄准技术研究*
2013-12-10 06:39:48韩路杰崔少辉韩文卿
弹箭与制导学报 2013年4期
韩路杰,崔少辉,方 丹,韩文卿
(1解放军军械工程学院,石家庄 050003;2 66010部队,石家庄 050000)
0 引言
随着防空导弹作战半径的增加,对防空导弹的反导能力提出了越来越高的要求。为了更好的摧毁敌方来袭导弹,防空导弹战斗部得到了迅猛的发展。定向战斗部由于其攻击目标准确,炸药能量利用率高等原因成为目前研究的热点[1-2]。普通的定向战斗部只是将炸药能量在战斗部周向的某一部分集中起来,实现战斗部周向上的定向或者定象限攻击。而瞄准式战斗部是一种可以时刻瞄准目标位置的定向战斗部,可以实现战斗部周向和径向两个方向的瞄准[3]。
瞄准式战斗部双向瞄准的能力,对导弹传感器的目标探测及定位能力提出了更高的要求。由于战斗部具有瞄准目标的能力,导弹对目标的攻击具有了更多的选择,这样必须为战斗部提供一个达到最佳攻击效果的条件,所以引入了战斗部最佳飞散半径的概念,战斗部的最佳飞散半径可以通过线下蒙特卡洛的方法推导出来,避免占用弹上有限的计算资源[4]。普通定向战斗部不能实现破片飞散方向上的双向控制,也不能反映破片与目标的相对运动情况[5]。所以研究瞄准式战斗部的目标定位,必须在分析导弹与目标相对运动的基础上增加如何控制破片飞散方向的分析[6]。
1 相对运动模型
在弹体坐标系内建立目标与导弹的相对运动模型。弹体坐标系是以战斗部中心为原点,弹轴前向为x轴,取弹体纵向对称面内与弹体纵轴垂直的方向为y方向,z轴与 x、y轴构成右手法则,建立弹体坐标系。在弹目交会段,目标相对导弹的运动可以近似为匀速直线运动,则导弹与相对运动速度矢量构成了导弹的攻击平面。破片要实现对目标的瞄准式攻击,破片相对导弹的飞散方向也必须在攻击平面内。
为了描述问题的方便,特作以下说明:将导引头测量到目标信息的时刻称为当前时刻,在当前时刻测量得到的目标位置称为目标的当前位置;将战斗部起爆时刻称为起爆时刻,起爆时刻对应的目标位置称为起爆位置;将战斗部要攻击的目标位置称为目标预估位置;将目标相对导弹的速度矢量与导弹构成的平面称作攻击平面。图1是弹体坐标系内破片与目标交会过程的示意图。
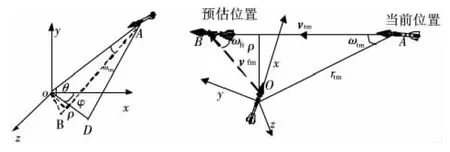
图1 破片与目标的交会过程
图中各个参数的意义如下:vfm:破片相对导弹的速度矢量;vtm:目标相对导弹的速度矢量;rBO:预估位置与导弹的距离;rBA:目标预估位置与当前位置的距离;rtm:当前时刻目标与导弹的距离;ωtm:目标相对导弹的速度vtm与弹目距离rtm的夹角;ωft:目标相对导弹速度矢量vfm与目标预估位置与导弹连线rBO之间的夹角;θ:导引头测量的俯仰角;φ:导引头测量的方位角;ρ:脱靶量大小。
可以决定弹目交会参数的导引头可以测量的信息有:弹目相对距离rtm、导引头测量的俯仰角θ、方位角φ和弹目径向相对速度vtmr。
瞄准式战斗部准确攻击目标的理想条件是目标和战斗部破片同时飞到空间的某一位置,这个位置就是目标的预估位置,在图1中定义为B点。这样战斗部起爆时破片的飞散方向就应该瞄准目标的这个预估位置,也就是说在起爆时刻破片相对导弹的速度方向应该在导弹与目标预估位置的连线上。
在vtm、vfm、ρ组成的三元关系中,vtm矢量是固定值;对于确定的战斗部类型及装药情况,vfm矢量的大小是确定的,飞散方向是瞄准式战斗部引战配合的控制量,由瞄准式战斗部的瞄准角决定。所以目标相对导弹的速度矢量vtm和脱靶量ρ可以唯一确定一个攻击平面。由于ρ是由vtm矢量和rtm矢量决定的,也可以说确定了弹目交会模型中的vtm标量,脱靶量大小ρ及vtm与弹目距离rtm的夹角ωtm,就确定了一个固定的弹目交会情况。再引入战斗部攻击目标达到最优效果的条件,就可以对破片的飞散方向及战斗部的起爆进行控制。
2 目标定位
要确定战斗部攻击目标达到最优的目标预估位置,首先要确定战斗部攻击目标达到效果最优的条件。这里引入战斗部破片最佳飞散距离ropt的概念。最佳飞散距离是指对于确定的目标类型,战斗部破片攻击到这个距离时,破片所形成的破片扩散区域可以对目标实现最优杀伤。对于确定的战斗部类型及装药情况,在目标类型一定的情况下,战斗部的最佳飞散距离ropt是固定值。这个值可以通过仿真实验的方法得到。这样,战斗部破片飞散方向的控制就有了依据,即对于瞄准式战斗部的引战配合,目的就是利用瞄准式战斗部双瞄准的能力,使破片的飞散距离达到既定的最佳飞散距离。
使破片的飞散距离rBO=ropt,就能实现战斗部对目标的最佳毁伤,也能够确定出目标预估位置的坐标。假设目标在起爆时刻从当前位置历经时间t到达预估位置,战斗部破片在起爆时刻起爆后同样历经时间t到达预估位置。则当前位置和预估位置的距离有如下关系:

式中:rBO是破片飞散距离,取rBO=ropt。
对式(1)求解可得:

ωtm的计算可以通过导引头测量的弹目径向相对速度vtmr与弹目相对速度的大小vtm通过式(3)计算得到,vtm的求解在第3节介绍。

通过距离三元关系可得:

则:

3 双瞄准控制
战斗部攻击目标时破片的飞散方向就是目标预估位置在弹体坐标系下的俯仰角和方位角信息。要确定目标预估位置的俯仰角和方位角信息,就需要求解目标预估位置坐标,而对预估位置坐标的求解,又需要测量vtm矢量在坐标轴3个方向的分量。方向控制过程中需要利用导引头测量的两次弹目距离信息及弹体坐标系下探测到的当前时刻目标的俯仰及方位信息,利用这些信息来外推目标预估位置的坐标信息及瞄准式战斗部方向控制信息。将导引头两次测量的数据通过坐标变化从球坐标系下的测量值变换到直角坐标系下,将变换后的信息做差再除以两次测量的时间间隔作为这两次测量中相对速度各坐标轴分量的平均值。即:
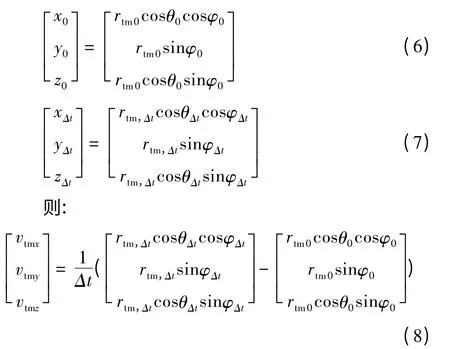
式中Δt是导引头两次测量之间的时间差。

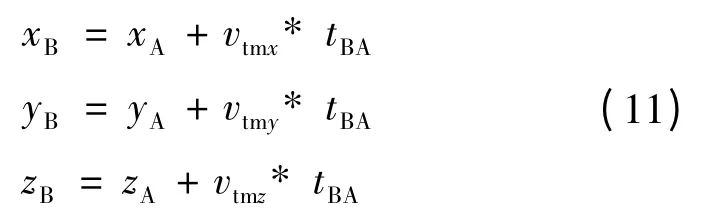
得到vtm矢量3个坐标轴上的分量后,就可以得到B点和A点的关系。目标从A点运动到B点的时间为:

式中,vtm是相对速度的大小。
B点坐标和A点坐标的关系为:
通过B点坐标可以得到目标预估位置在弹体坐标系中的俯仰角和方位角,也就是瞄准式战斗部瞄准系统需要调整的俯仰角和方位角。
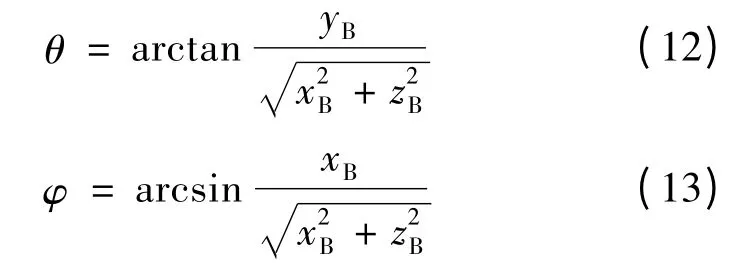
其中:θ是俯仰角,φ是方位角。
4 仿真分析
取弹目距离的测量误差为(-10m,10m),(-20m,20m),(-30m,30m)均匀分布,在相对速度为 -706.2m/s,脱靶量为 18.1m,分析弹目距离测量误差对瞄准角的影响。结果如图2所示。
从图中可以看出,弹目距离越近,距离测量误差对瞄准角的影响越大,这样因为同样的测量误差对近距离的影响更加明显;距离测量误差越大,瞄准角误差越大;一般导引头的距离测量误差均小于30m,而总体看来,小于30m的距离测量误差引起的瞄准角误差较小,换算到角度时也小于毫角度级。

图2 距离测量误差对瞄准误差的影响
分别取导引头俯仰角测量误差为(-3μrad,3μrad),(- 5μrad,5μrad),(- 7μrad,7μrad),弹目距离从7000m变化到0m,仿真分析角度测量误差的变化对瞄准角误差的影响,结果如图3所示,因俯仰角误差和方位角误差对瞄准角误差的影响相当,在这里只列出俯仰角误差对瞄准角的影响,方位角误差的影响不再重复。
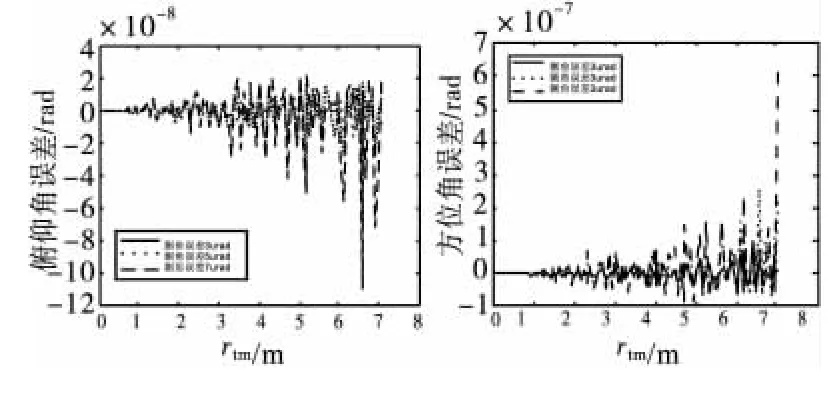
图3 角度测量误差对瞄准误差的影响
从图中可以看出,角度测量误差对瞄准误差的影响随弹目距离的增大而增大,距离越远,瞄准角的误差越大,瞄准式战斗部的角度控制越不精确。所以,随着导弹与目标的接近,瞄准式战斗部的角度控制会越来越精确,角度控制是一个不断修正并且不断精确的过程。导引头的角度测量误差越大,瞄准角的控制误差就越大,并且角度测量误差和瞄准角的控制误差基本上在同样的数量级。所以采用滤波算法降低导引头的测角误差是降低瞄准角误差的有效方法。
取径向速度测量误差分别为(-5m/s,5m/s),(-10m/s,10m/s),(-15m/s,15m/s),弹目距离从7000m变化到0m,分析径向速度测量误差对瞄准角控制误差的影响,仿真结果如图4所示。
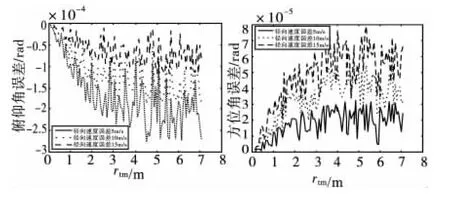
图4 径向速度测量误差对瞄准误差的影响
从图4可以看出,径向速度测量误差对瞄准角控制误差的影响较为明显,且随弹目相对距离的减小迅速降低。在同样的弹目相对速度下,径向速度测量误差越大对瞄准角的影响就越大。所以降低导引头对弹目径向速度的测量误差,可以显著降低瞄准角的控制误差。而现实中被广泛采用的多普勒导引头对径向速度的测量误差通常可以达到5m/s以下,这为瞄准式战斗部的实现提供了可能。
5 结论
传统的防空导弹战斗部不能在俯仰和方位两个方向上实现对目标的瞄准,文中通过引入战斗部破片最佳飞散半径的概念,实现了对目标预估位置的定位和在俯仰和方位上的瞄准。
仿真结果表明,导引头测距误差随弹目距离的减小使瞄准误差增大,而测角误差及径向速度测量误差随弹目距离的减小使瞄准误差降低;测距误差对瞄准误差的影响较小,测角误差和瞄准误差几乎处于同一数量级,径向速度测量误差对瞄准误差的影响较大;降低测角误差和径向速度测量误差是降低瞄准误差的有效方式;瞄准误差可以在导弹攻击目标的过程中随弹目距离的减小而不断修正,精度会越来越高。
[1]张志鸿,周申生.防空导弹引信与战斗部配合效率和战斗部设计[M].北京:中国宇航出版社,2009.
[2]孙学清,张国伟,杨陕平.定向战斗部破片飞散方向控制技术研究[J].弹箭与制导学报,2008,28(1):102-104.
[3]秦帅,杨锁昌,李乐,等.瞄准式战斗部最佳起爆延时控制研究[J].弹箭与制导学报,2012,32(4):92 -94.
[4]范作娥,顾文锦,姜鹏,等.基于蒙特卡洛法的反舰导弹末段机动突防效果研究[J].海军航空工程学院学报,2010,25(3):241 -246.
[5]兰志,杨亚东,韩玉.起爆方式对偏心式定向战斗部破片速度分布的影响[J].弹箭与制导学报,2010,30(3):159-161.
[6]李宏刚,简金蕾,魏少莉.定向战斗部最佳起爆方位角研究[J].空军工程大学学报:自然科学版,2003,4(4):19-22.
猜你喜欢
舰船电子工程(2023年8期)2023-11-15 06:51:08
弹道学报(2023年3期)2023-10-14 01:00:56
中国测试(2018年10期)2018-11-17 01:58:40
航天制造技术(2018年4期)2018-09-04 04:05:00
兵器装备工程学报(2017年4期)2017-04-28 01:12:28
现代防御技术(2016年1期)2016-06-01 12:13:27
制导与引信(2015年3期)2015-04-20 00:44:22
弹箭与制导学报(2015年1期)2015-03-11 15:32:13
弹道学报(2014年1期)2014-12-26 06:33:32
弹箭与制导学报(2014年1期)2014-09-20 09:27:26
