
基于数据块特征的地面目标识别方法研究*
2013-12-10 06:40:04王佳坤
弹箭与制导学报 2013年4期
王佳坤,王 蜂
(1武汉大学遥感信息工程学院,武汉 430079;2西安二炮工程大学,西安 710025)
0 引言
对地攻击武器要精确打击地面目标,首先需要确定被攻击目标的位置。采用图像处理与识别技术是获取地面目标准确位置的一种有效方法。
图像识别是在光学、雷达、红外等图像中寻找目标的一种处理方法。用于识别目标的数字图像由像素排列组成,单个像素灰度只反映一个区域某个波段能量辐射强弱,很难与目标之间建立必然联系,只有较多的像素才能反映目标在图像中形状和结构特征[1]。文中基于被识别目标的结构特点,提出一种基于图像数据块特征的,能够有效识别不同背景下特定目标的方法。
1 图像识别方法及存在问题
图像识别基本原理是寻找目标与背景之间的差异。图像识别一般方法是通过图像处理,获取边缘、灰度、纹理、频谱等特征,放大目标和背景之间差异,再根据识别目标特殊形状、结构等数据特征,判断识别目标。
在简单背景下,目标和背景区分明显,一个空中红外图像的亮点特征可能就是飞机,一个海上强反射雷达信号可能就是舰船,而在复杂背景下,目标和背景光学特征往往混杂在一起,不容易判断和识别。影响地面可见光图像目标识别的主要因素有:光线强弱和生成模型影响图像灰度值;目标三维结构和拍摄位置与角度影响图像形状;相似目标相似特征影响目标判断依据。这些因素影响了图像识别的准确性和可靠性。
目前图像识别方法,大部分寄希望于复杂的数据处理技术,常针对特定背景采取特殊识别方法,在光线、背景变化情况下难以保持目标识别能力[2-3]。分析图像生成过程,虽然辐射能量、拍摄位置角度变化影响像素灰度,但目标的结构形状具有相对稳定性,其生成图像的数据块也具有稳定结构。因此,可以根据目标在图像中形成数据块的结构特点,识别这些目标。
2 目标图像结构分析
需要进行图像识别的地面目标,常常是人类设计、建造的物体,如:停机坪上的飞机,移动的车辆,各种形状的建筑物等。用于识别目标的图像来源于遥感卫星或攻击武器的实时成像,因此,这类目标图像一般具有以下典型特征:
1)相对稳定的结构特征。即使受光线强弱、云雾干扰影响,像素灰度出现较大变化,但其边缘结构、形状等特征仍然比较稳定。
2)具有俯视图像特点。地面图像通常从上往下拍摄,目标形状随着拍摄角度几何变化不大,比较容易校正。
3)目标常常可以拆分成更小的规则形状。这类人造物体图像可以看作由基本点、线、面等元素构成,如果在特定数据块范围内包含这些元素,基本可以认定该数据块包含了要识别的目标。
4)目标信息包含于一个数据块中。识别目标总有一定大小,其在图像中分布也有一定范围,全部像素构成一个不规则形状的数据团。
依据这些特点,可以根据相对稳定的图像特征来识别目标,把目标特征限定在数据块范围。对于结构简单目标,可以通过匹配等方法,判断数据块是否包含目标特征;对于结构复杂图像,可以分解目标特征,把它看作是在数据块内包含多个简单特征来识别。这样可以缩小特征范围,减少干扰对识别的影响。
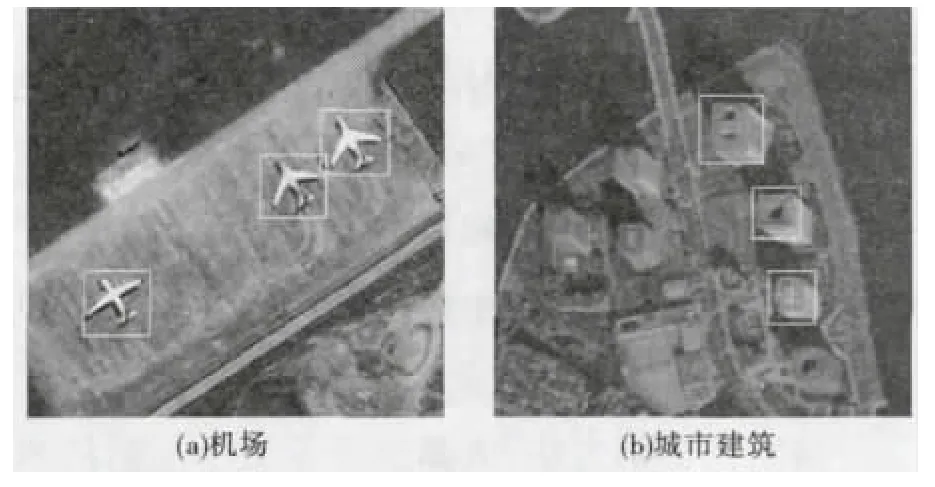
图1 典型地面目标图像
图1是机场飞机和城市重要建筑图像,白框是包含目标的数据块。图1(a)图像飞机是目标,其特征很明显,虽然两种机型存在细微差别,但都包含在大小相似的数据块里。图1(b)图像建筑是目标,特征也明显,白框中的3个建筑顶部都包含若干方形结构,不同建筑略有差异,上框建筑由一个大方形套两个小方形,中间框建筑包含两个四方形特征,下框建筑包含很多正交线条。这些特点均符合前面的分析。
截取图像特征块如图2所示,依次命名为飞机1、2,建筑 1、2、3 。
3 数据块特征与识别方法
图像数据形成过程与光线强弱关系密切,很难找到一种万全方法克服光线差异对识别影响,比较好的办法是针对不同目标特点,设计不同识别方法。
首先根据目标属性,把图像特征锁定在一个不大的数据块内,只要搜索图像中这样大小的数据块包含特征,就能判断确定目标。因此,目标识别就变成数据块特征识别与计算问题。
将图1飞机和建筑目标三维化,灰度数据变成三维高度(见图3)。分析数据特点:
对于飞机目标,其对可见光反射往往高于背景,因此目标数据总是大于周围背景数据,显示成为与目标立体结构近似一致的图像。建筑目标则不同,虽然其外观是个饱满立体,但受光线照射强度方向,建筑表面材料特性等影响,将灰度特征三维化后,其形状与立体目标有本质区别,高的位置图像灰度可能低,低的位置图像灰度也可能高,也即存在灰度翻转现象,并且翻转方向不确定。进一步分析建筑物数据,虽然灰度强弱与建筑高低没有必然关系,但建筑边缘棱角位置的灰度仍然存在差异,形成明显轮廓。尽管受到光线影响和干扰,作为建筑轮廓特征,其基本构造仍然被保留。
因此,地面目标图像灰度在光线下变化,可分为不存在反色和存在反色两种类型。根据灰度图像数据块变化特点,提出下面目标特征识别方法。
3.1 数据块整体特征匹配计算
对于类似飞机这样的目标,其本身就是一个明显特征,这种特征不易因光线照射变化而在图像数据块上出现灰度翻转等变化,目标区域灰度具有相对稳定的高低变化特征。因此,用灰度匹配方法能够最准确度量数据块目标相似性。
Nprod算法是一种计算图像之间相似度的方法[4]。相似度 R(a,b)表示为:
其中:N1、N2为目标特征数据方块大小;fij为N1、N2特征数据块中i、j位置灰度值;a、b为匹配计算相似度的位置;g(a,b)ij为以(a,b)为中心,与特征数据块相同大小的数据块i、j位置灰度值;R(a,b)为特征块数据与(a,b)位置图像数据相似度。当相似度R(a,b)出现明显峰值时,可认为该点就是特征目标。
3.2 数据块形状与结构特征分布计算
对于建筑物这类可能因光线变化造成反色的目标,上述方法显然不能正确度量目标相似度。这类目标虽然部分灰度反色了,但边缘特征仍然保持。因此可以先提取它们边缘特征,剔除反色影响,再根据这些特征结构分布,采用相应识别方法,判断、识别这些目标。识别这类特征可依据下列约束条件来实现:
1)特征局限在有限的数据块范围;
2)特征表现为线段或圆弧等人造物体形状;
3)选择强特征作为目标图像识别元素。
3.3 计算方法实时性分析
攻击武器一般以高亚音速飞临目标,速度在300m/s上下,接近目标几千米时才能获得可以识别目标的清晰图像,因此,整个图像制导攻击过程只有10s左右时间。在这段时间里,图像制导要完成识别、锁定和跟踪整个过程。跟踪是在锁定位置很小范围计算目标特征,相对计算量小,容易实现实时计算;识别和锁定是在较大视野里计算和确定目标,相对计算量较大,计算过程必须在短短几秒内完成,否则不能满足实时性要求。
上述Nprod匹配方法,特征块大小 N1、N2和搜索视野也不是很大,特征块算式是个恒值,计算量总体不是很大;第二种方法在提取边缘特征后,特征匹配计算量相对更小。依据以往实验经验,采用高性能处理器能够满足实时性要求。
4 基于特征块的地面目标识别方法
对于图1中两类不同性质目标,采用数据匹配和特征计算识别方法,用Matlab编程计算目标位置。
对机场飞机目标,依照待识别飞机结构特点,通过叠加处理,获得两种飞机目标模拟数据,这种数据更能够反映飞机目标的结构共性。
将模拟的两种飞机模块数据,用图1(a)图像范围做匹配计算,获得相似度图。对于图4(a)运输机图像数据匹配,只产生一个匹配峰值;对于图4(b)轰炸机图像数据匹配,产生了两个匹配峰值。显然,匹配方法与实际目标能够对应。
在匹配计算中,运输机匹配还出现两个次峰值,轰炸机匹配也出现一个次峰值,说明轰炸机和运输机数据模块存在一定相似度。

图4 飞机目标数据块与匹配相似度
对建筑类型目标,采用侧抑制图像处理方法获得图像边缘特征[5-6]。
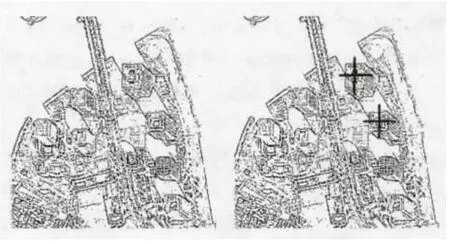
图5 目标边缘特征与识别建筑1、2位置
通过边缘提取,将建筑物轮廓特征归一为边缘。根据建筑物大小,确定建筑物数据块大小为35像素×35像素,在这样大的框内寻找包含3个以上长直边缘特征所在的位置。通过计算,确定了建筑1,建筑2的位置,如图5中两个“十”字中心所在位置。
建筑3与1和2特征表现有差异,需另选择特征识别方法。
Matlab是一种编程效率较低的高级语言,选择WIN7系统2.53GHz主频单核计算机,在上述两种识别方法计算中,分别耗时1.29s和0.27s,如果采用专用处理器,优化计算程序,完全可以满足实时计算要求。
5 结论
文中提出的数据块特征匹配和数据块结构识别方法,首先将识别目标的特征局限在数据块范围,限定了特征分布;其次,将识别目标分为灰度不反色和反色两类,采用匹配和特征识别方法,有效避免了光线变化对识别影响。实验表明,该方法能够有效识别不同类型目标。
[1]汪闽,骆剑承,明冬萍.高分辨率遥感影像上基于形状特征的船舶提取[J].武汉大学学报:信息科学版,2005,30(8):685-688.
[2]杜春,孙即祥,李智勇,等.光学遥感舰船目标识别方法[J].中国图象图形学报,2012,17(4):589 -595.
[3]蒋李兵.基于高分辨光学遥感图像的舰船目标检测方法研究[D].长沙:国防科学技术大学,2006.
[4]沈帮乐.计算机图象处理[M].北京:解放军出版社,1995.
[5]李言俊,张科.视觉仿生成像制导技术与应用[M].北京:国防工业出版社,2006.
[6]Milan Sonka,Vaclav Hlavac,Roger Boyle.图像处理、分析与机器视觉[M].艾海舟,苏延超,译.3版.北京:清华大学出版社,2011.
猜你喜欢
中学生天地(A版)(2022年11期)2022-11-25 07:43:16
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
电子制作(2019年16期)2019-09-27 09:34:50
中国交通信息化(2019年4期)2019-07-13 05:51:34
新世纪智能(英语备考)(2018年11期)2018-12-29 10:56:52
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
自动化学报(2017年5期)2017-05-14 06:20:56
小学生学习指导(低年级)(2016年10期)2016-12-01 06:10:42
