
磁电式转速传感器的优化设计*
2013-12-07 06:55:18徐光卫宋春华
传感器与微系统 2013年2期
徐光卫,宋春华
(西华大学机械工程与自动化学院,四川成都610039)
0 引言
转速传感器按照工作原理的不同可以分为:磁电式、光电式、离心式、电涡流式和霍尔式等。其中磁电式转速传感器是一种机—电能量转换型传感器,不需供电电源、电路简单、性能稳定、输出信号强,因此,在实际工程中具有广泛的应用[1]。
磁电式转速传感器基于电磁感应原理,通过磁电相互作用把转轴的转速转换成相对应的感应电动势,再经过对输出感应电动势信号进行处理和分析就可以得到转轴的实际转速。在实际应用中,当转轴启动的速度过快时,会产生一个瞬时高电压对信号处理电路产生较大的危害。因此,本文对磁电式转速传感器的永磁体结构进行了研究,设计了一种启动时无瞬时高电压的磁电式转速传感器。同时,设计了磁电式转速传感器的信号处理电路。
1 电式转速传感器设计
1.1 磁电式转速传感器的结构与原理
图1所示为磁电式转速传感器的结构图,它由装在轴上的内齿轮和外齿路、感应线圈、永久磁铁等部分组成。当内齿轮和外齿轮的齿凸相对时,气隙最小,磁阻最小,磁通最大;当内齿轮和外齿轮的齿凹相对时,气隙最大,磁阻最大,磁通最小。这样当内齿轮与外齿轮相对运动时,传感器的磁通就发生周期性变化,从而在线圈中感应出电动势信号[2]。
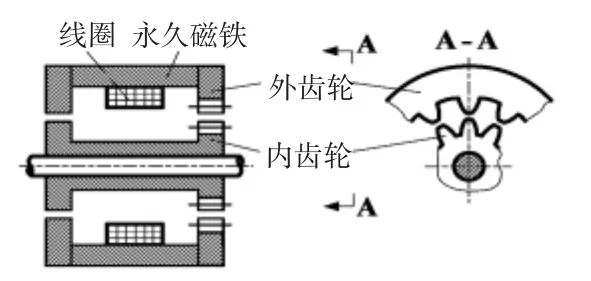
图1 磁电式转速传感器结构图Fig 1 Structure diagram of magnetoelectric rotational speed sensor
1.2 电磁场分析理论基础
Maxwell方程组是电磁场理论的基础,它由4个定律组成:安培环路定律、法拉第电磁感应定律、高斯电通定律和高斯磁通定律。
Maxwell方程组有2种表示形式,即积分形式和微分形式。其中微分形式用于有限元分析处理电磁问题,即电磁场的分析和计算化为求微分方程的解。
有限元的思想最早由Courant在1943年提出,有限元法(finite-element method)这个名称由Clough于1960年在其著作中首先提出。多年来,以变分原理为基础建立起来的有限元法广泛地应用于各种结构工程。所谓有限元法,就是将整个区域分割成许多很小的子区域,这些子区域被称为“单元”或“有限元”,将求解边界问题的原理应用于这些小区域中,求解每个小区域,然后将小区域的结果总和起来得到整个区域的解[3]。
1.3 磁电式转速传感器永磁体设计
Ansoft Maxwell为一种低频电磁场有限元软件,可以对电磁机构进行数值分析,本文使用其对磁电式转速传感器进行仿真实验。
本文以一种量程为20 N·m的磁电式转速传感器为研究对象。首先在Ansoft Maxwell中建立整体圆环结构永磁体磁电式转速传感器的三维模型如图2所示,对其进行运动仿真得到感应电动势的波形图如图3所示。
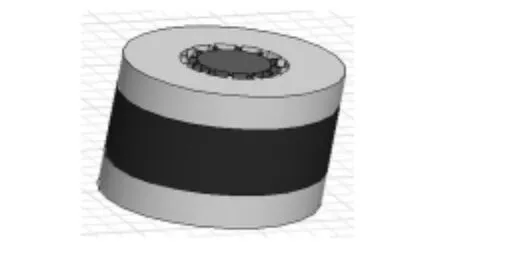
图2 整体圆环永磁体结构磁电式转速传感器模型Fig 2 Model of magnetoelectric rotational speed sensor with whole ring structure of permanent magnet
从图3的感应电动势图可以看到,传感器在启动瞬间由于磁通瞬时变化而产生瞬时高电压大小为14.4 V,而信号处理电路的安全电压一般都在5 V左右,因此,这种传感器的信号处理电路的使用寿命通常较短。针对上述问题,本文对磁电式转速传感器的永磁体结构进行了研究。永磁体产生的磁场充斥着整个空间,当空间中具有多个永磁体的时候它们之间的磁场就会相互影响,进而影响到磁电式转速传感器的输出感应电动势特性。
经过仿真实验,发现一种8片瓦型永磁体结构磁电式转速传感器如图4所示,8片瓦型永磁体的体积为原来整体结构永磁体的1/2,8片瓦型永磁体之间为气隙。其感应电动势图如图5所示。从图5可以看出:这种8片瓦型永磁体结构磁电式转速传感器没有瞬时的高电压,消除了对后续信号处理电路的影响,可以提高后续信号处理电路的使用寿命。
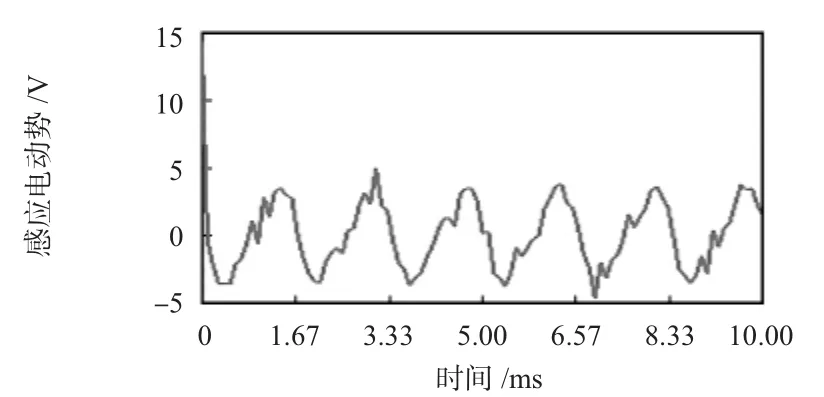
图3 整体圆环结构永磁体磁电式转速传感器感应电动势图Fig 3 Induced electromotive force diagram of magnetoelectric rotational speed sensor with whole ring structure of permanent magnet
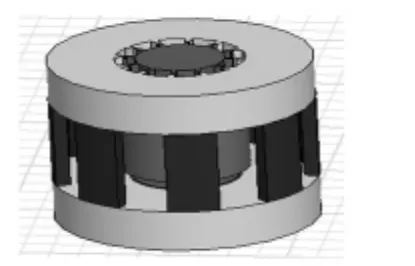
图4 8片瓦型永磁体结构磁电式转速传感器模型Fig 4 Model of magnetoelectric rotational speed sensor with 8 tile permanent magnet structure
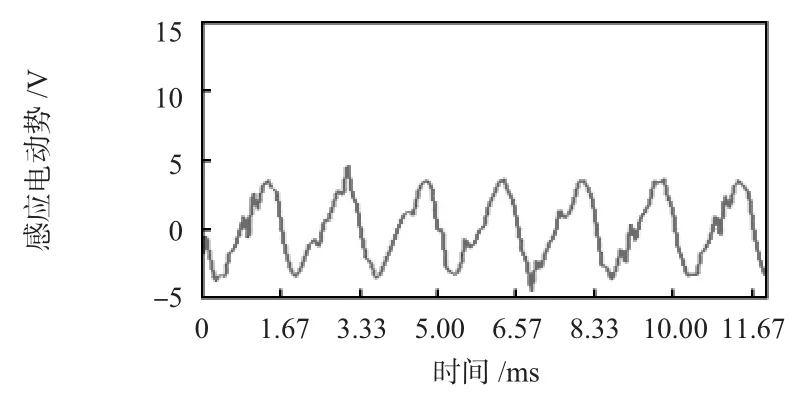
图5 8片瓦型永磁体磁电式转速传感器感应电动势图Fig 5 Induced electromotive force diagram of magnetoelectric rotational speed sensor with 8 tile permanent magnet structure
1.4 输出信号波形处理电路的设计
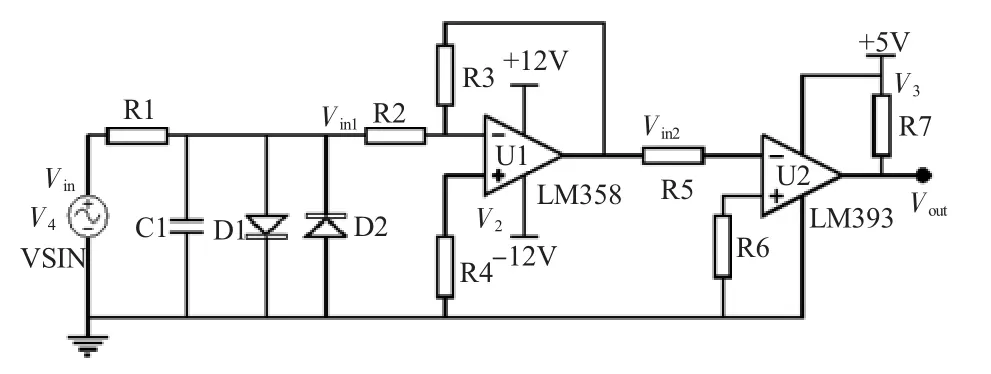
图6 输出信号波形处理电路图Fig 6 Circuit diagram of output signal waveform processing
图7为输出信号波形处理仿真图,由图可以看出:近似正弦波信号Vin经过滤波、钳位后振幅变为0.7 V的Vin1,再经过反向放大器LM358后变成振幅为3.5 V的Vin2,Vin2再经过集成电压比较器LM393变成峰值为5V的单极方波信号Vout。
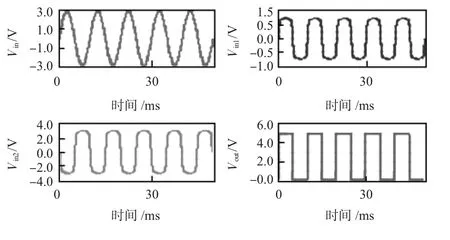
图7 输出信号波形处理仿真图Fig 7 Simulation diagram of output signal wave processing
2 结束语
本文介绍了磁电式转速传感器的结构原理,针对磁电式转速传感器启动时会产生瞬时高电压的问题,通过使用有限元分析软件Ansoft Maxwell建立一种具有8片瓦型永磁体结构的20 N·m磁电式转速传感器的模型并进行仿真,得出一种可以消除启动瞬时高电压的永磁体结构设计方案,同时设计了传感器输出信号的波形处理电路,并通过Protel对信号波形处理电路进行仿真证实其是切实可行的。
[1]何道清,张 禾,谌海云.传感器与传感器技术[M].北京:北京科学出版社,2008:6.
[2]胡向东,刘京诚,余成波,等.传感器与检测技术[M].北京:机械工业出版社,2009:2.
[3]赵 博,张洪亮.Ansoft 12在工程电磁场中的应用[M].北京:中国水利水电出版社,2010:1.
[4]张世英,于玺兴,朱杰堂,等.智能转速传感器设计[J].传感技术学报,2011,24(2):313-316.
[5]徐 科,黄金泉,张天宏,等.基于DSP的航空发动机转速传感器设计[J].推进技术,2004,25(2):180-182,186.
[6]何秀然,谢寿生,钱 坤.航空发动机智能转速传感器的设计[J].传感技术学报,2005,18(3):496-499.
[7]Masayuki K,Hiroyuki O.Running torque of ball bearings with polymer lubricant[J].Transactions of the Japan Society of Mechanical Engineers C,2005,71(1):272-279.
[8]王文成,李 健.基于单片机的点击转速测量系统的设计[J].仪表技术与传感器,2011(8):70-72.
猜你喜欢
高中数理化(2023年8期)2023-09-07 20:15:52
内燃机工程(2021年6期)2021-12-10 08:07:46
微特电机(2021年1期)2021-01-25 03:23:14
仪表技术与传感器(2020年5期)2020-06-11 07:01:10
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
大电机技术(2018年4期)2018-09-26 03:11:30
制造技术与机床(2017年3期)2017-06-23 08:11:52
中学物理·高中(2016年12期)2017-04-22 16:36:46
电工技术学报(2015年6期)2015-11-15 09:18:10
