
AMR传感器在UBM线性扫描探头中的应用
2013-12-07 06:54:16柳青青
传感器与微系统 2013年2期
柳青青,郑 政
(上海理工大学医疗器械与食品学院,上海200093)
0 引言
超声活体显微镜(ultrasound biomicroscopy,UBM)是频率高于40 MHz的超声影像技术,因其卓越的组织分辨能力,被越来越多地应用于浅表器官和实验动物的超声检查[1,2]。由于工艺的原因,UBM探头仍然采用线性机械扫描。通常,UBM探头要求达到大于15 mm的扫描范围,位移精度小于50μm,扫描帧率大于10 Hz。线性机械扫描可以用步进电机、直流电机或电磁扫描机构驱动。步进电机控制简单,但振动和噪音比较大;直流电机或电磁扫描机构更加适用于UBM探头驱动。但后者需要实时监测直线位移信息,位移信息的检测精度直接决定了探头扫描精度。
伺服系统中常用的直线位移传感器通常有电位器式、差动变压器式、光栅尺等传感器。电位器式传感器结构简单,输出信号大,使用方便,但容易磨损;差动变压器式传感器灵敏度高,量程范围宽,线性度好,但是体积偏大;光栅尺结构复杂,价格偏高。本文采用各向异性磁电阻(anisotropy magneto resistive,AMR)传感器检测UBM扫描探头的直线位移,无接触,精度高,实时性好,而且体积小。
1 AMR传感器原理
将铁磁性物质通过真空镀膜方式蒸镀到薄膜上,沿一定方向通电流,铁磁性物质会表现出一定的电阻。当这个薄膜放置于磁场中时,薄膜上的磁畴会沿着磁场方向排列,铁磁物质的电阻会发生变化,这种变化与磁场和电流方向的夹角相关。这种现象叫做AMR效应,利用AMR可测出磁场方向的变化[3,4]。
HMC1501是Honeywell公司生产的一种典型的AMR传感器。它在同一薄膜材料上制作出4只相同的电阻器,构成一个惠斯顿电桥,如图1。通电后,电桥将输出一个电压,输出电压的大小只与外部磁场的方向有关,而与磁场大小无关[6]。HMC1501 的饱和磁场为 80 Gs[5]。
HMC1501的输出是外部磁场和参考方向之间的角度θ的函数

如图2所示,其中,Vs是供电电压,S≈12 mV/V,是一个常数[5]。
根据Honeywell公司提供的技术文献,磁钢沿着轴线A移动(如图2所示),以磁钢在传感器正下方为0,得到如图3所示的波形图。从图中可以看出:最小值与最大值之间的中间区域具有很好的线性,可以用来检测线性位移。
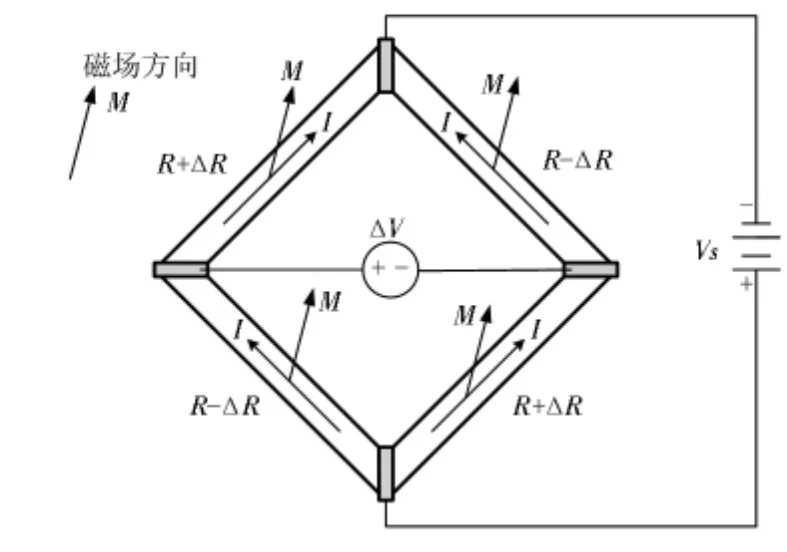
图1 AMR传感器原理示意图[5]Fig 1 Principle diagram of AMR sensor[5]
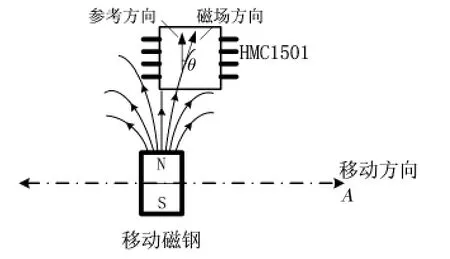
图2 HMC1501位移检测示意图[5]Fig 2 Schematic diagram of displacement detection by HMC1501[5]
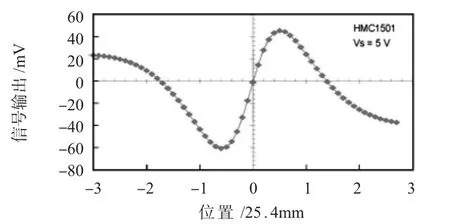
图3 HMC1501线性位移波形图[5]Fig 3 Linear displacement waveform diagram of HMC1501[5]
2 UBM探头扫描系统设计
系统采用直流电机旋转驱动,用齿轮齿条作为运动转换部件,实现超声换能器的线性运动[7]。超声换能器的位置依靠与其连接的磁钢和HMC1501传感器测出。2只HMC1501传感器1和传感器2的相对位置如图4所示。系统由TI公司PIC16F1827单片机控制,该芯片集成了A/D转换模块,时钟频率为32 MHz。传感器1和传感器2测得的电压分别通过A1和A2放大,放大后的信号 Va1和Va2从单片机的I/O口输入进行A/D转换,得到s1和s2。单片机对得到的s1和s2进行分析,运算,得到位移信息xt

xt和位移指令xs作比较,得到两者的差Δx

图4 系统模块示意图Fig 4 Schematic diagram of system module

控制系统的调节目标是Δx为0[8]。Δx通过控制器运算,输出给DAC进行D/A转换,由A3放大器进行功率放大,驱动电机旋转,由齿轮齿条传动机构带动超声换能器移动。如此,形成一个伺服控制系统。在数字控制中,常用算法可以分为位置式PID控制算法和增量式PID控制算法。本系统采用位置式PID控制算法。
若当前时刻为n时刻,得到Δx(n),n-1时刻和n-2时刻的差值分别为Δx(n-1)和Δx(n-2),则输出的Dout为

其中,a0,a1,a2均为常系数。将 Δx(n-2),Δx(n-1),Δx(n)分别用 d2,d1,d0代替得到简洁的表达式

Dout输出给DAC进行D/A转换。
3 实验测试
3.1 位移检测标定
为能够精准地控制换能器位移,需要对位移传感器进行标定。先测得传感器输出电压和实际位移之间的比例关系

式中 ΔV为传感器输出电压,k1为常数,x为实际位移。
如图5所示为位移标定装置,将扫描装置固定在支架上,固定超声换能器的连接件与螺旋测微器一端固定。扫描电机不加电,然后通过调节螺旋测微器旋钮,每隔500μm标定一个固定位移,记为xd。用示波器测量(如图5所示)A1和A2的输出,记为 Va1,Va2,记录 Va1和 Va2。多次测量,取平均值,得到如图6(a)所示位移传感器的输出与超声换能器的位移关系曲线。
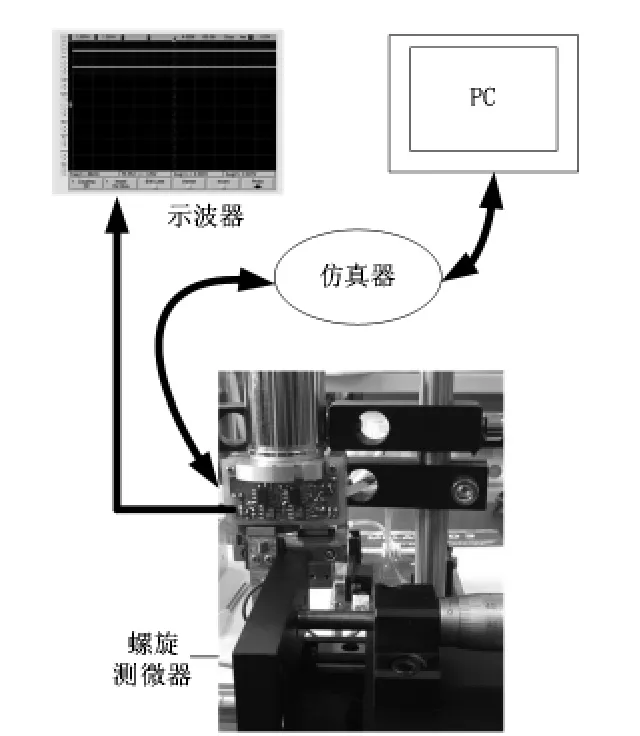
图5 位移标定装置示意图Fig 5 Schematic diagram of displacement calibration device
对采集到的数据进行分析,发现Va1+Va2的值单调递减,因此,选用Va1与Va2的和为判断依据,进行信号重组,当它们的和大于或等于指定值时,采用Va1;当和小于指定值时,采用Va2,并将Va1作平移与Va2衔接,得到如图6(b)所示曲线Va。从图中可以看出:Va的线性度并不好,可能是受到导轨(钢性材料)的影响,与HMC1501技术文献中所阐述的具有一定的差异性。为解决线性度不足的问题,需要对Va进行分段线性拟合,最大程度上保留数据本来具有的变化规律。把非线性段曲线分成N个区段,在每个区段中用直线段近似地代替曲线,然后再把各区段的分析结果衔接起来,就得到了一条由N条直线段组成的曲线。将这N个直线段方程以列表形式排列在存储器中,当系统得到s1和s2(对应Va1和Va2)时,根据s1和s2的值通过指令查找对应的函数来计算当前位移xt(如公式2所示)。
3.2 静态误差分析
如图4所示,通过示波器来检测A1和A2处的电压,4次采样取平均值,记录数值Va1和Va2,由Va1和Va2得到Va值。如3.1节中介绍的分段线性拟合方式,在每个区段里,Va值和超声换能器位移值的方程都是线性的。根据Va值查找对应的区段方程,计算实际位移值xt。每隔500μm测量稳态时命令位移值xs与实际位移值xt的误差。得到如图7所示的静态误差曲线,系统静态误差标准差为8.32×10-7nm。
3.3 动态性能测试
按照图5所示的测试系统进行测量,得到如图8所示UBM扫描帧率为10 Hz,扫描范围为15 mm的动态位移曲线,其中xs为内部命令位移,xt为检测位移。将xt曲线平移,与xs曲线基本重合,测量线性区域段的xt与xs的差值,误差为27.5μm,小于50μm,基本符合精度要求。
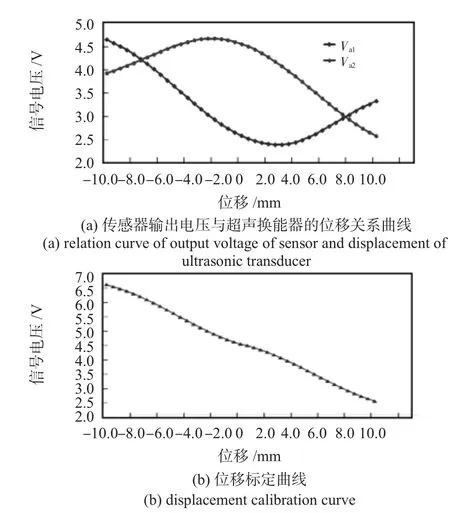
图6 传感器输出电压与超声换能器的位移关系和位移标定曲线Fig 6 Relation of sensor output voltage and displacement of ultrasonic transducer and displacement calibration curve
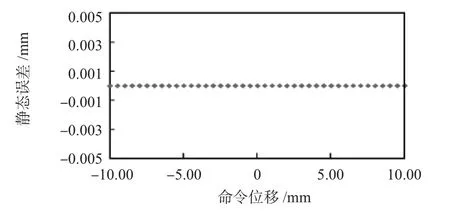
图7 系统静态误差测量曲线Fig 7 Static error measuring curve of system
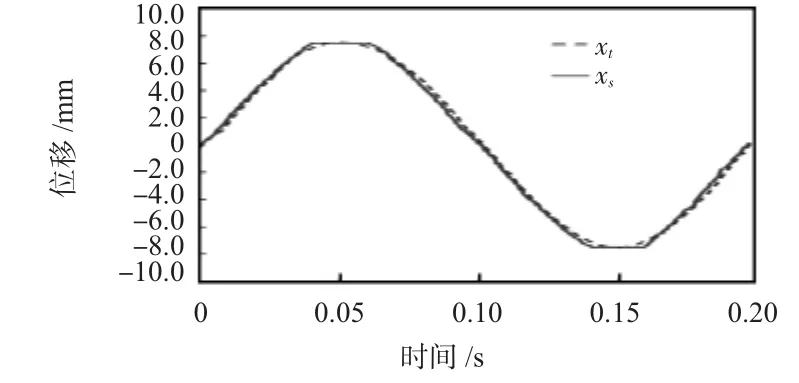
图8 系统动态性能测试曲线Fig 8 Dynamic performance test curve of system
4 结论
本文对AMR位移传感器在UBM扫描探头中的应用进行了系统研究和验证。通过高精度螺旋测微器对传感器的位移检测进行标定,并通过示波器对测量系统的误差进行了测试。实验过程和数据表明:AMR传感器在有限范围内具有精度高、结构简单的优点,可以为UBM扫描探头提供高精度的位移信息。
[1]王宁利,刘 文.活体超声显微镜眼科学[M].北京:科学出版社,2002:287-288.
[2]冯 若.超声诊断设备原理与设计[M].北京:中国医药科技出版社,1992:35-86.
[3]裴 铁,虞南方,刘 奇,等.各向异性磁阻传感器的原理及其应用[J].仪表技术与传感器,2004(8):26-32.
[4]Taghvaeeyan S,Rajamani R.The development of AMR sensors for vehicle position estimation[C]∥American Control Conference,2011:3936-3941.
[5]Honeywell.Applications of magnetic position sensors[Z].Honeywell.
[6]Zimmermann E,Verweerd A,Glaas W,et al.An AMR sensorbased measurement system for magnetoelectrical resistivity tomography[J].Sensors,2005,5(2):233-241.
[7]柳青青,赵智慧,李金冬,等.一种超声线性扫描装置:中国,ZL201120217149.7[P].2012—03—07.
[8]雨宫好文,末松良一.机械控制入门[M].北京:科学出版社,2000:62-84.
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
汽车维修与保养(2020年11期)2020-06-09 05:42:16
声学与电子工程(2017年1期)2017-06-22 11:30:06
声学与电子工程(2017年1期)2017-06-22 11:29:57
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
光学精密工程(2016年3期)2016-11-07 09:03:34
Coco薇(2016年1期)2016-01-11 16:53:24
雷达与对抗(2015年3期)2015-12-09 02:39:00
