城市CORS参考站稳定性监测与区域地表变形分析
2013-12-06 08:55刘志强刘全海王解先谢中华
测绘工程 2013年4期
刘志强,刘全海,王解先,谢中华
(1.同济大学 测量与国土信息工程系,上海 200092;2.河海大学 地球科学与工程学院,江苏 南京 210098;3.常州市测绘院,江苏 常州 213002;4.现代工程测量国家测绘局重点实验室,上海 200092)
随着城市信息化建设进程的不断推进,国内的一些城市近年来纷纷开展连续运行卫星定位服务系统CORS(Continuously Operating Reference Stations)的建设。城市CORS是在传统GNSS(Global Navigation Satellite System)差分定位的基础上快速发展起来的一种基于多基准站的区域卫星定位增强系统。它不仅是动态的、连续的空间数据参考框架,同时也是快速、高精度获取空间数据和地理特征的重要手段。由于受板块运动、人类活动等因素影响,CORS系统建成后各参考站会随着时间的变化产生不同程度的三维位移变化。对CORS参考站的位移变化规律进行分析研究,既可解决CORS运营维护者普遍关心的系统稳定性问题,又能够为城市区域的地表变形提供一种高精度、有效的监测手段。近年来,国内外一些学者利用区域CORS开展了一系列有关参考站稳定性分析、板块构造运动、地表变形监测的研究工作[1-5]。在对CORS数据处理的过程中,不同学者对参考框架的选择、变形监测基准合理性等问题的认识仍存在不同程度的差异,针对不同研究对象得到的参考站位移和区域地表变形速度场的结果亦不尽相同。本文以常州市CZCORS系统为例,对比分析不同参考框架和变形监测基准对参考站位移监测结果的影响,并探讨利用城市CORS进行区域地表变形监测与分析的方法。
1 CORS观测数据与基线解算
常州市CZCORS系统由CZSM、JTAN、LYNG、WJIN、XBEI共5个连续运行GNSS参考站组成,参考站间平均距离43.9km。各参考站均采用高精度双频GNSS接收机(LEICA GRX1200GGPRO),并采用统一的双频大地型天线(LEIAX1202GG)。各参考站的GNSS天线均安置于基础相对稳定的建筑物顶部,周围观测天空开阔,受多路径效应影响较小。CZCORS各参考站空间分布合理,能较好地覆盖常州市各行政区划,可作为区域地表变形的监测网。
本文选取2009年10月至2011年10月期间24个月的CZCORS参考站的观测数据进行分析处理,且设定监测周期为6个月。为增强监测网基线处理的可靠性,每期监测数据分别取连续7d的数据进行基线解算,得到连续7d的单天解作为本期观测的重复基线。基线解算采用GAMIT软件(10.4版),在进行基线处理时,下载BJFS、KUNM、SHAO、WUHN、TWTF共5个IGS站的同步观测数据进行联合解算。联测的IGS(International GNSS Service)站近似坐标为ITRF2005参考框架、瞬时历元坐标,并设置各IGS站东西向、南北向及径向 先 验 坐 标 约 束 为0.005m、0.005m和0.010m。其中,固定SHAO站作为起算点,其余IGS站作松弛约束,可得到基线单天无约束解。在采用IGS精密星历和高精度起算点时,其解算长基线的相对精度能达到10-9量级,能满足高精度变形监测网的要求。
2 参考框架与监测基准的选择
2.1 ITRF框架
在进行变形监测数据的处理和分析时,首先要将GNSS技术获得的监测点坐标纳入到合理、统一的参考框架中。国际地球参考框架ITRF(Internatial Terrestrial Reference Frame)是利用GNSS、VLBI、SLR、LLR及DORIS等多种空间技术,由全球测站观测资料成果推算得到的四维地心坐标参考框架。迄今为止,IERS已发布11个版本的ITRF框架。目前最新、精度最高的坐标参考框架是ITRF2008,于2010-05-28日 发 布。相 对 于ITRF2005,ITRF2008在原点、尺度等框架定义参数方面有较大的改进和修正,其参考站坐标和速率的精度也均有明显提高[6]。每次ITRF的更新,都意味着对地壳运动认识的不断深入。ITRF的实现能够充分顾及到地壳板块运动规律,并且具有高精度、稳定性强的特点,因而可以作为较为理想的大尺度范围内地表变形分析的动态坐标参考基准。
由于CORS得到的区域地表变形监测数据时间周期一般较长,期间通常会涉及到不同时期的ITRF坐标参考框架。由于不同的ITRF框架的定义不同,这就导致了ITRF框架间会存在系统性差异。在求取各期监测网点位坐标成果时,应归算到统一的ITRF框架下,由此消除因坐标参考基准差异引起的位置、尺度、方位和时间演变的系统性误差。本文分析的CZCORS数据涉及ITRF2005和ITRF2008两种坐标参考框架。二者之间的转换可通过基于欧氏空间的相似变换实现。

式中:T,˙T为转换参数及其变化率;D,˙D为尺度因子及其变化率;R,˙R分别为旋转矩阵及其变化率。ITRF2005和ITRF2008在2005.0历元的14个转换参数具体值可参见文献[6]。
2.2 监测网平差基准
在对变形监测网进行数据处理和分析时,一般采用经典的所谓固定参考基准。然而,对于大尺度范围内的CORS监测网而言,则需将参考基准纳入到国际地球参考框架ITRF中,这时就应充分顾及基准的时空变化规律,将其视为动态参考基准。从监测网的平差方式来看,若仅固定单个IGS站进行三维无约束平差,则不会使CORS网形产生畸变。由此得到的是各期监测网点的相对ITRF坐标,其仅相对于所选的IGS测站具有较高的精度。但在由不同期监测成果计算点位位移时,要考虑所选IGS站的坐标及速率的误差影响,选取固定不同的IGS站所得到的位移场结果可能不同。若固定多个IGS站进行约束平差,则可将监测网纳入到由所选的IGS站组的坐标及其速率所确定的坐标参考系统中,由此得到的是各期监测网点的绝对ITRF坐标。由于约束平差的方式是将CORS网与所选IGS站组进行强制符合,理论上会引起监测网形的畸变。这取决于所选IGS站组坐标及速率的精度及相互之间是否有较好的兼容性。
2.3 对比分析
CZCORS基线解算完成后,进行网平差得到的是对应ITRF框架下的三维空间直角坐标(X,Y,Z)。将2009-10的CZCORS网的平差结果作为首期成果,其后4期的平差结果与之相减得到各监测点的三维位移变化值(dX,dY,dZ)。为直观地分析点位变化情况,通常需要将地心坐标系中的点位位移结果转换到站心坐标系中,得到平面(North、East)和高程(Up)分量的位移变化值(N,E,U)。各期位移(dN,dE,dU)除以时间间隔即可得到监测点在平面和高程方向上的位移速率。地心坐标系和站心坐标系间的转换关系如式
(3)所示[7]。

式中:B,L分别为测站点的大地纬度和大地经度。
为比较采用不同ITRF框架、不同平差基准对监测网点位移结果的影响,分别采用如下两种方案对CZCORS监测网进行处理:
方案1:在ITRF2005和ITRF2008框架下进行无约束平差(仅固定SHAO站),结果如表1所示;

表1 ITRF2005和ITRF2008框架各期无约束平差位移值mm
方案2:在ITRF2008框架下,分别进行无约束平差(仅固定SHAO站)和约束平差(固定5个IGS站,即BJFS、SHAO、KUNM、TWTF、WUHN),结果如表2所示。
表1中SHAO站的各期位移值由ITRF公布的已知值计算得到。从表1可以看出,分别采用ITRF2005和ITRF2008框架进行三维无约束平差,在不同框架下各CORS监测站点位移的平面分量值与参考基准SHAO站的变化规律表现出高度一致性;而高程分量值的变化差异较大,这主要是由于城市CORS参考站与全球IGS站的标墩基础构造条件不同所引起的。由此可见,采用不同的ITRF框架进行无约束平差,各期监测点的位移结果主要取决于所选取的IGS站在不同ITRF框架下的坐标及速率差异。在同一参考框架下,固定不同的IGS站作为参考基准,得到的监测网点位移结果会有所不同。无约束平差结果得到的各期监测网点坐标为相对坐标,其相对于作为参考基准的IGS站具有较高精度,而且监测网形无畸变。
从表2可以看出,在ITRF2008框架下,仅固定SHAO站进行无约束平差,得到的BJFS、KUNM、TWTF、WUHN参考站的各期位移结果,与ITRF2008已知值计算出的结果相比均存在不同程度的差异。这反映出无约束平差结果所确定的尺度与ITRF2008框架的尺度存在较为明显的差异。从CZCORS各监测点的位移结果互差值来看,采用无约束和约束平差对各测站的影响值基本一致。这说明约束平差仅对CZCORS网有整体的平移效应,并未改变CZCORS各网点间的相对位置关系。不同期的约束平差结果对CZCORS网的平移程度略有不同,这种差异的量级取决于不同期基线解算的精度变化,在能保证基线解算结果精度和可靠性的情况下,不会对分析各期位移结果变化情况产生明显影响。采用固定多个IGS站进行约束平差,可以得到各期监测网点在ITRF框架下的绝对坐标结果,其所确定的尺度与ITRF2008框架本身的尺度较为接近。在现有GNSS基线解算所能达到的精度水平下,由无约束和约束平差结果计算得到的各期监测网点间的相对位移变化结果并无显著差异。

表2 ITRF2008框架各期无约束与约束平差位移结果互差 mm
3 位移结果与地表变形分析
在ITRF2008框架下,固定5个IGS站(BJFS、SHAO、KUNM、TWTF、WUHN)对CZCORS网进行约束平差,可得到各期监测网点相对于2009年10月首期坐标成果的位移变化值,如表3所示。

表3 ITRF2008框架各期约束平差位移结果 mm
表3中5个IGS站的各期位移值由ITRF公布的已知值计算得到。CZCORS各期监测点位移值平面分量(North,East)变化与已知的各IGS站变化规律有较好吻合。在ITRF2008框架下,CZCORS网有向东南方向整体运动的趋势,其平面位移变化值及其运动方向与各IGS站对应的结果基本一致。由表3中CZCORS各监测网点的位移变化值,可以计算出常州市区域地表水平位移速度场如图1所示。
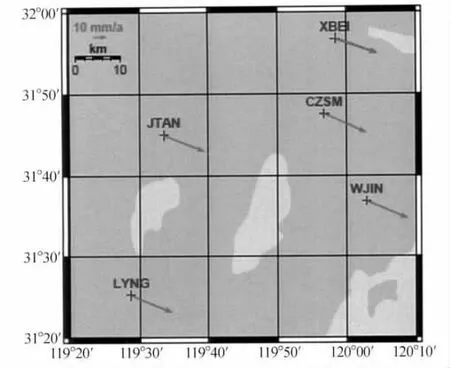
图1 ITRF2008框架下水平位移速度场
从表3中给出的各测站垂直方向位移变化值可以看出,不同IGS站及各CZCORS参考站间存在较大差异。对IGS站而言,BJFS、TWTF存在明显的抬升趋势,而KUNM、SHAO及WUHN站在监测周期内的变化并不明显。图2为CZCORS各期监测点垂直分量变化情况。其中,CZSM、JTAN站表现出一定的抬升趋势,LYNG、XBEI站总体变化量不大,而WJIN站则表现出较为明显的下沉趋势。该监测结果与城市二等几何水准网平差计算结果基本一致。由于GNSS高程方向的测量精度一般要比水平方向低2~3倍,而且CZCORS各参考站均为屋顶标墩,季节温度变化因素会一定程度上影响建筑物垂直方向上的位移,因此,仅由CZCORS得到的各参考站的垂直分量位移结果可靠性往往难以保证。将ITRF框架下测站点垂直方向上的相对位移计算结果与城市二等几何水准成果进行相互验证,可以为城市CORS各参考站高程稳定性变化提供一种较为有效、可靠的检验方法。由于受城市CORS网参考站的数量及空间分布密度限制,CORS站的变形监测成果尚不足以精确、可靠地反映城市大面积区域的地表垂直位移变化状况,为此还可进一步结合该区域的差分干涉测量D-InSAR(Differential-InSAR)技术成果进行分析[8]。

图2 ITRF2008框架下垂直位移变化值
4 结 论
本文通过对常州市CZCORS网监测数据的处理,对比分析了不同ITRF参考框架和变形监测基准对城市CORS参考站位移及区域地表变形监测结果的影响,得到以下结论和建议:
1)在利用城市CORS网进行参考站稳定性监测与区域地表变形分析时,应采用动态参考基准,并将其纳入到国际地球参考框架ITRF中。
2)采用不同的ITRF框架进行无约束平差,主要取决于所选取的IGS站在不同ITRF框架下的坐标及速率差异,而且得到的监测成果为相对坐标,仅相对于作为参考基准的IGS站具有较高精度。
3)在统一的ITRF框架下,在现有GNSS基线处理所能达到的精度水平下,由无约束和约束平差结果计算得到的各期监测网点间的相对位移变化结果并无显著差异。在最新的ITRF2008框架下固定一定数量的IGS站进行约束平差,得到的监测成果为绝对坐标,其所确定的尺度与ITRF2008框架本身的尺度较为接近。
4)利用城市CORS网的监测成果,可以精确地建立城市区域地表水平位移速度场;若进一步结合精密水准测量、D-InSAR等监测成果进行相互验证,则可获得精确的城市区域地表垂直位移速度场。
[1]黄立人.GPS观测结果形变分析的参考框架及其合理性[J].测绘学报,2001,30(1):16-20.
[2]李江卫,刘经南,肖建华,等.CORS系统稳定性监测数据处理与分析研究[J].武汉大学学报:信息科学版,2010,35(7):825-829.
[3]薄万举,胡新康,董运洪,等.用GPS位移场进行中小区域变形分析方法探讨[J].大地测量与地球动力学,2010,30(3):31-34.
[4]ZHANG KEFEI,HU YOUJIAN,LIU GANGJUN,et al.Deformation monitoring and analysis using Victorian regional CORS data[J].Journal of Global Positioning Systems,2005,4(1):129-138.
[5]刘经南,施闯,许才军,等.利用局域复测GPS网研究中国大陆现今地壳运动速度场[J].武汉大学学报:信息科学版,2001,26(3):189-195.
[6]ALTAMIMI Z,COLLILIEU X,MÉTIVIER L.ITRF2008:an improved solution of the international terrestrial reference frame[J].Journal of Geodesy,2011,85(8):457-473.
[7]伍吉仓,邓康伟,陈永奇.地心坐标系与站心坐标系中的速度转换及误差传播[J].大地测量与地球动力学,2005,25(3):13-18.
[8]何敏,何秀凤.利用D-InSAR技术监测盐城地区地表形变[J].测绘通报,2010(11):1-3.
猜你喜欢
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
劳动保护(2018年8期)2018-09-12
舰船电子对抗(2016年5期)2016-12-13
公民与法治(2016年19期)2016-05-17
导航定位学报(2015年2期)2015-06-05
读者·校园版(2015年7期)2015-05-14
航天器工程(2014年5期)2014-03-11
铁路通信信号工程技术(2014年1期)2014-02-28
电子设计工程(2014年6期)2014-02-27