基于跟踪精度的火控雷达网间歇开机控制策略
2013-12-01 07:12陈兴凯韩壮志封吉平李成玉王学磊
探测与控制学报 2013年5期
陈兴凯,韩壮志,封吉平,李成玉,王学磊
(1.军械工程学院电子与光学工程系,河北 石家庄 050003)
(2.武汉军械士官学校光电装备系,湖北 武汉 430075)
0 引言
火控雷达通常采用持续照射的工作方式对目标进行跟踪,这种工作方式使得火控雷达信号极易被敌方侦察设备所截获,从而严重影响了火控雷达的战场生存能力。为了提高雷达在战场上的低截获性能,通常采用的低截获概率(LPI)技术可以分为信号设计[1]和辐射控制[2]两大类。前者设计复杂,定型后对复杂多变的电子对抗环境适应性差,且很大程度上受到其软硬件技术瓶颈的限制;而后者在现役雷达的基础上,通过控制策略可以灵活有效地提高雷达的低截获性能。
目前对于雷达辐射控制的研究有很多,比较有代表性的是文献[2-3]中的最小功率策略和最小驻留策略,但由于火控雷达的工作方式,需要对目标进行持续的高功率照射,因此很难将这两种策略运用其中;文献[4-5]针对火控雷达提出了间歇辐射和组网间歇辐射控制方法,但该方法需要火控雷达的脉冲重复周期或脉冲重复频率(重频)实时变化,对于现役火控雷达而言,重频的变化只能做到参差、抖动或滑变,而且其变化范围十分有限,因此该方法尚处于理论研究阶段。本文提出一种基于跟踪精度的火控雷达网辐射控制策略,该策略将间歇开机与雷达网相结合,通过跟踪精度对网内的各雷达进行间歇开机控制。
1 火控雷达的跟踪精度与间歇开机
1.1 跟踪精度
火控雷达的主要任务是对敌方飞行目标进行跟踪,将获取的位置信息传输给火力单元,由火力单元对目标进行火力打击。所以,火控雷达工作时对目标的跟踪性能直接决定了火力单元对目标的打击效果。
火控雷达对目标的跟踪模型[6]通常可以采用匀加速(Constant Acceleration,CA)运动模型,它具有良好的参数调整性及稳定性,适于火控雷达对目标跟踪的仿真。为了衡量雷达对目标的跟踪效果,可以将跟踪模型中滤波协方差定义为跟踪精度。设t时刻火控雷达对目标跟踪的滤波误差协方差矩阵为P(t/t),则定义该时刻系统的跟踪精度tr(t)为
根据火控雷达工作时的跟踪任务需求,可以将常规的火控雷达跟踪精度分为两个门限精度:跟踪需求门限精度tr1和火力打击需求门限精度tr2,其数学模型可以描述为:

其中t0表示开始准备施行火力打击的时刻。只有在满足上式的情况下,才认为火控雷达能够对目标进行有效跟踪。
1.2 间歇开机
间歇开机是现役火控雷达常用的工作方式之一,由于雷达从输入开机指令到完全开机发射电磁波需要一定时间,所以间歇开机的工作间歇期并不是将雷达完全关机,而是仅仅将雷达的发射机关闭,即不发射电磁波。雷达天线则根据之前采取的目标信息进行静默跟踪,即根据预测的俯仰角和方位角信息进行实时调整。在间歇期过后,发射机启动,迅速找到目标,继续获得目标的实时位置信息。发射机的打开时间较雷达完全开机时间大大缩小,所以间歇开机是现役火控雷达在现实战场中易于实现的有效工作方式之一。
但是单部间歇开机工作下的火控雷达只能对平稳匀速的目标进行静默跟踪,对一些机动目标则很容易跟踪丢失。
2 基于跟踪精度的间歇开机控制策略
本文从现役火控雷达的实际性能考虑,将间歇开机与雷达组网相结合,通过多部火控雷达协同作战,完成对目标的跟踪,即在雷达的工作间歇期,通过其他雷达的正常工作,实现对目标的持续跟踪。同时,各分布雷达取不同的重频,在不考虑其他参数的情况下,重频越高,跟踪精度越高,但被侦察系统所截获的概率就越高;重频越低,跟踪精度越低,但被侦察系统所截获的概率就越低。因此,为了提高整个雷达网的低截获性能,辐射控制的基本原则是在雷达网工作时,实时计算其跟踪精度,在满足跟踪任务需求的情况下,将重频低的雷达作为工作雷达;一旦不能满足跟踪需求,则转换到重频高的雷达工作。
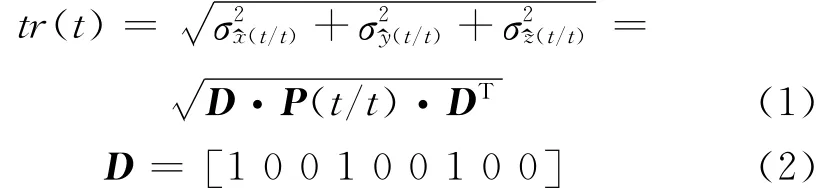
以三部火控雷达的辐射控制策略为例,其t时刻的控制策略如图1所示,其中雷达1的重频最高,雷达2次之,雷达3最小;tr(t)表示t时刻的跟踪精度;trx表示不同阶段的跟踪门限精度,即(3)式中的tr1或tr2;为了增强控制策略的灵活性,设置门限g,表示连续两个时刻跟踪精度的变化门限。其具体实施方法为当t时刻的跟踪精度tr(t)不能满足需求,即大于trx时,将雷达网中的工作雷达从当前雷达转换到重频更高的雷达,此时如果跟踪精度变化大于门限g,则转换到剩余雷达中重频较高的雷达,否则转换到剩余雷达中重频较低的雷达;当tr(t)满足需求时,即满足(3)式,将雷达网中的工作雷达从当前雷达转换到重频更低的雷达,此时如果跟踪精度变化大于门限g,则转换到剩余雷达中重频较小的雷达,否则转换到剩余雷达中重频较大的雷达。如果是雷达2工作,则不需要判断变换门限g,直接根据跟踪精度进行转换。
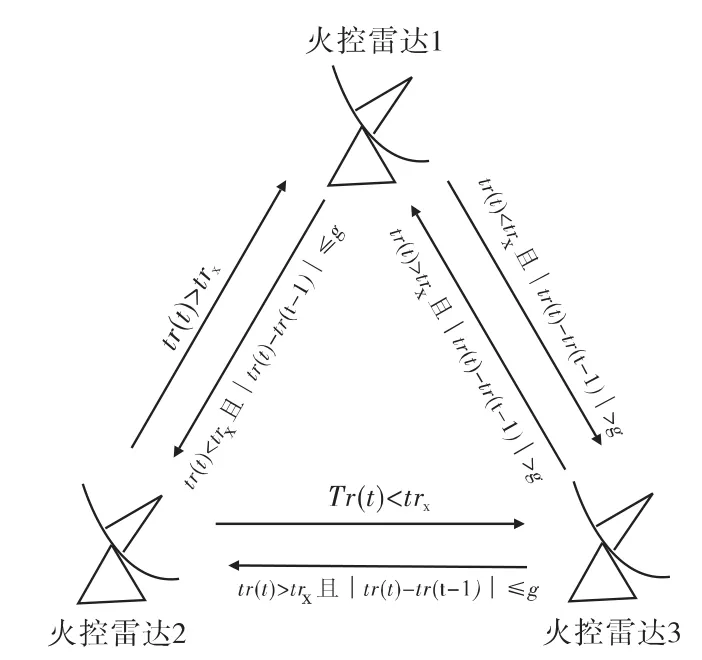
图1 三部火控雷达组网的辐射控制策略Fig.1 Radiation control strategy of three radars network
在此控制策略下雷达网中只有一部雷达完全开机,需要对三部火控雷达的量测数据进行融合,进而控制各雷达的工作状态。静默跟踪下的雷达由正常工作的雷达提供俯仰角和高低角的信息,这样在雷达网工作过程中,各雷达之间可以迅速转换,保持对目标的持续跟踪。
3 控制策略的评估验证
3.1 前端截获的功能仿真
前端截获是侦察系统对雷达信号进行侦察的前提和保证,它体现了侦察设备前端发现和检测雷达信号的能力。对于侦察设备后端,往往关心的是分选识别的信号处理能力,所以一般所说的截获概率都是指前端截获概率。截获概率可以反映侦察系统一定的性能,因此可以用来定量评估雷达系统的低截获性能。
对于侦察设备的前端截获判断条件,可以考虑以下几个主要因素[7-8]:信号能量特性、空域特性、频域特性和时域特性。当四个因素全部满足截获条件时,即可判断侦察系统前端可以截获所侦测的雷达信号,否则不能截获。对于火控雷达而言,由于工作时要对目标进行持续照射,并且其作用范围较警戒雷达小了很多,这样就基本可以认为能量和空域上一直被截获。所以侦察系统对于火控雷达的前端截获判断主要是时域和频域的截获判断。
以典型的搜索式超外差侦察接收机为例,时频域截获的表述如图2所示,图中(fmax-fmin)为频率搜索范围,Tf为频率搜索周期,PRI为雷达信号的脉冲重复周期,τ为脉冲宽度。
图2 时频域表述示意图Fig.2 The sketch of the time-frequency domain interception
只有在信号到达侦察设备前端的频域截获,才能判定为时频域截获。即在脉宽有效时有:

其中fr为信号载频;f0为侦察搜索时的中心频率,其取值在频率搜索范围内;Δf为测频带宽。
前端截获判断的功能仿真是单次截获过程的仿真,为了获得可以作为定量评估指标的截获概率,在功能仿真的基础上进行蒙特卡罗仿真。单次仿真中,侦察机如果截获到了雷达信号,则计截获一次,通过多次仿真累加获得截获次数。仿真结束后,则可用截获次数除以仿真次数计算出截获概率。
需要说明的是截获概率必须要有对应的截获时间,否则是没有意义的。所以在蒙特卡罗仿真的基础上限定截获时间,通过限定不同时间的蒙特卡罗仿真可以获得对应时间的截获概率。仿真流程图如图3所示,图中n为仿真累加次数;N为蒙特卡罗循环次数;t为运行时间;PRIx为仿真时间推进步长,即工作雷达的脉冲重复周期;tup为截获时间上限;m为截获累加次数;IP为最终所获得的截获概率。设定不同tup则可获得对应截获时间为tup的截获概率。
图3 仿真流程图Fig.3 The flowchart of simulation
3.2 仿真结果
为了对实验结果进行有效对比,在相同条件下对火控雷达分别进行单独和组网状态下的前端截获仿真。由于两部雷达组网控制灵活性较低,而火控雷达从开始跟踪目标到给火力单元传输目标位置信息的工作时间较短,4部或4部以上雷达数目过多,在组网控制策略下会有冗余,所以雷达个数选取为3个。
由于本文研究重点为火控雷达网的辐射控制策略,所以选取的火控雷达信号参数均为恒定的。3部雷达的脉冲重复周期分别取1ms、4ms和8ms,信号载频fr和脉宽τ分别取相同值9GHz和5μs。跟踪需求下的精度tr1为7m,火力打击需求下的精度tr2为5m。跟踪精度的变化门限g取0.05m。侦察机的频率搜索范围(fmax,fmin)为7~11GHz,频率搜索周期Tf为2ms,测频带宽Δf为10MHz,每次仿真的搜索中心频率f0初始值随机。其航迹方程为:
航迹初始值为x0=15km,y0=8km,z0=5km。
整个仿真持续时间最多为7s,开始准备施行火力打击的时刻t0为3.5s。以0.5s为间隔,分别设置0~7s的截获时间上限tup。每次截获仿真的蒙特卡罗次数N为100。
3部雷达在单独正常工作下的跟踪精度如图4所示,在截获仿真下的截获概率如图5所示。从仿真图中可以看出,在仿真过程中火控雷达1一直满足门限精度,雷达2满足跟踪需求的门限精度但不满足火力打击需求的门限精度,雷达3一直不满足门限精度。在截获仿真中,设截获概率到达0.9的时刻为该雷达的被截获时间,3部雷达分别约为2s、3s和6s。虽然雷达1能满足门限精度,但是被截获的时间小于开始准备火力打击的时刻3.5s,雷达3的被截获时间虽然大于3.5s,但是达不到门限精度,即不能保证火控雷达的任务需求。
根据本文的辐射控制策略,将上述3部雷达进行组网,在控制策略下的跟踪精度如图6所示,截获概率如图7所示。图8显示了组网状态下,各雷达间歇开机转换情况,不同的脉冲重复周期对应不同的雷达。
从仿真结果可以看出,在控制策略下,雷达网满足跟踪门限精度,并且被截获时间为4s,超过了3.5s,说明火控雷达网在满足其跟踪任务需求的同时,低截获性能获得了提高。
图4 单独工作的跟踪精度Fig.4 Tracking accuracy of single radar
图5 单独工作的截获概率Fig.5 Intercept probability of single radar
图6 组网控制下的跟踪精度Fig.6 Tracking accuracy of radar network
图7 组网控制下的截获概率Fig.7 Intercept probability of radar network
图8 组网控制下的工作雷达Fig.8 Working radar in network
4 结论
本文提出了一种基于跟踪精度的火控雷达网辐射控制策略。该策略将间歇开机与雷达组网相结合,实时计算火控雷达对目标的跟踪精度。在满足跟踪精度时,将重频低的雷达作为工作雷达;一旦不能满足跟踪精度,则转换到重频高的雷达工作。仿真结果表明,在该辐射控制策略下,火控雷达网不仅能满足正常的跟踪任务需求,而且其低截获性能也有了一定的提高。由于本文主要研究方法为时域上的辐射控制,在仿真中没有选取较为复杂的低截获信号参数。如果对应参数有所变动,仿真结果也会随之变化,但辐射控制策略是通用的。在以后的研究中,还将加入低截获信号设计以及组网布站等因素,对抗干扰、抗反辐射导弹、反隐身等反雷达对抗措施进一步仿真研究,以提高现役火控雷达的作战效能及生存能力。
[1]侯小林,羊彦,高健健,等.雷达低截获概率信号及验证方法[J].西安电子科技大学学报(自然科学版),2012,39(4):184-190.
[2]廖俊,于雷,俞利新,等.基于LPI的相控阵雷达辐射控制方法[J].系统工程与电子技术,2011,33(12):2638-2642.
[3]David Lynch,Jr.Introduction to RFStealth[M].SciTech Publishing Inc,2004.
[4]徐宏,韩壮志,何强,等.火控雷达间歇辐射模型及其低截获性研究[J].现代雷达,2011,33(1):8-11.
[5]熊久良,徐宏,韩壮志,等.基于组网的火控雷达间歇式目标跟踪技术研究[J].现代雷达,2011,33(8):13-16.
[6]李成玉,杨小龙,韩壮志,等.基于自适应脉冲间隔的火控雷达目标跟踪技术[J].计算机工程,2011,38(21):276-278.
[7]赵行云,李华,唐雪飞.雷达侦察设备功能仿真数学模型[J].计算机仿真,2006,23(4):5-7.
[8]Richard G Wiley.ELINT:The Interception and Analysis of Radar Signals[M].US:Artech House Inc,2006.
猜你喜欢
能源工程(2022年2期)2022-05-23
体育科技文献通报(2022年3期)2022-05-23
现代电力(2022年2期)2022-05-23
煤气与热力(2022年4期)2022-05-23
汽车实用技术(2022年4期)2022-03-07
昆明医科大学学报(2021年6期)2021-07-31
化工设计通讯(2021年2期)2021-03-15
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
火力与指挥控制(2019年4期)2019-06-14