膝骨性关节炎运动质量评估系统设计
2013-11-27 04:47洪汇隆李玉榕陈建国
中国生物医学工程学报 2013年5期
洪汇隆 李玉榕* 陈建国 杜 民
1(福州大学电气工程与自动化学院,福州 350000)
2(福建省医疗器械和医药技术重点实验室,福州 350000)
引言
膝骨性关节炎(knee osteoarthritis,KOA)是骨科临床常见疾病之一。随着人口结构的老龄化,其发病率越来越高,危害也越来越大,患者在发病后,会出现反复发作性关节疼痛,严重者会导致关节面广泛破坏,甚至关节畸形[1]。西医对于膝骨性关节炎,主要是单纯的药物治疗,严重者可进行关节部位相关的手术和置换术治疗。但是西药中都含有不同剂量的皮质激素,长期服用可能会导致全身免疫力的下降。中医主要是通过内服、外洗的方法,并配合针灸、推拿等外治法进行综合治疗。步态修正技术是通过步态分析技术对行走中人体重心位移、各关节活动的力矩、功率及整体能量消耗等随时间变化的参数,据此做出全面、综合的客观评价,借助外部设备改变膝关节的受力调整步态,帮助患者恢复[2-3]。这些治疗都有一定确切的疗效,但是不能根本解决骨性关节炎对患者预后的功能活动带来的影响[4]。如果患者运用适当的主、被动功能锻炼,可增强下肢肌力及耐力,促进血液循环,增加关节活动度,保持关节的稳定性,对稳定病情、缓解症状都起到积极的作用,因此运动理疗法对膝骨性关节炎具有巨大的临床应用价值。直腿抬高训练是膝骨性关节炎运动理疗法中具有代表性的训练之一,该训练的规范动作是训练者平躺仰卧,一条腿弯曲,一条腿伸直,直腿进行调高训练,尽量慢且流畅,抬高约30°,保持10 s后缓慢放下,每组10次[5]。每次进行若干组训练。如果训练不规范,例如抬腿过高,抬高过程中腿部没能保持伸直状态,或者直腿抬高以后保持时间太短等,都有可能加重患者的膝关节部的负担,达不到功能训练的效果,甚至可能导致病情的恶化。因此本研究设计一种基于ZigBee技术的无线穿戴式运动监护系统,确保患者在一定的规范下进行这项训练。
人体运动状态的识别目前主要有基于视频的检测技术和基于运动加速度检测技术两种技术。基于视频的检测技术具有识别率高、算法成熟等优点,但是由于需要特殊装置用于高速图像处理,且要求实验环境光照条件良好,测试者在视距范围内相机才能记录下快速人体运动;导致系统结构复杂、造价昂贵、可携带性差;而基于运动加速度检测技术避免了动态环境对数据采集的影响,且穿戴式检测技术能够减少测试者心理负担,从而准确的采集运动信息,系统结构简单,具有实时性好、准确性高、性价比高、便于携带等优点[6]。通过直接人体运动的加速度信息,避免了视频检测系统中动态环境多方面的因素对检测产生的不利影响,降低了数据的处理难度。并且本系统的定位为便携式人体运动监护系统,即患者能够使用本系统在非实验室环境中也能正常的使用,视频检测系统则无法满足这一需求。因而采用基于加速度检测技术对人体的运动状态进行监测,并且使用了灵敏度为200 mV/g的mma7361加速度传感器采集人体的加速度信息。
Taylor等利用5个加速度传感器采集人体下肢加速度信息进行动作平均识别率达到了80%,但其并没有对特征量进行提取和筛选,导致进行分类的特征量过多,不利于实时的监测[7-8]。
本研究所设计的基于ZigBee的人体下肢运动监护系统,应用小波分析对采集的运动加速度信号频域特性进行分析,并利用粒子群算法提取特征向量,最后应用BP神经网络对运动质量进行分类评估。
1 方法
1.1 系统描述
系统主要的设计目的是为膝骨性关节炎患者,在进行康复保健操训练时提供一种无监护下的运动质量评估系统。让使用者在没有医护人员监护的情况下,也能够自主的规范的完成康复训练。
系统框架图如图1所示,主要有:1)采集用户运动加速度信号的信号采集与上传模块,该模块主要由两个ZigBee终端模块和一个ZigBee协调器模块组成。两个终端模块分别穿戴在人体直腿的大腿和小腿上,模块应平行于人体冠状面穿戴在腿部的上表平面,并且穿戴在大腿和小腿的中部位置,并使两个终端模块保持在一条直线上,协调器模块在接收到终端模块的加速度信息后上传给上位机。2)加速度信号处理的信号分析模块。信号的分析与处理由上位机来完成。
终端ZigBee模块的电路主要是RF射频发送电路和数据采集电路,采用收发公用天线的方案,并且为了模块的小型化采用了印制电路板天线。其外围电路主要包括晶振时钟电路、复位电路、射频输入/输出匹配电路、微控制接口电路和加速度信号采集电路等5个部分组成。协调器的ZigBee模块电路与终端模块电路不同之处在于去掉了加速度采集模块,增加了串口通信模块。

图1 无线采集系统Fig.1 Wireless data acquisition system
MMA7361为三轴小量程加速传感器是检测物件运动和方向的传感器,它根据物件运动和方向改变输出信号的电压值。各轴的信号在不运动或不被重力作用的状态下0g,其中g为重力加速度,即9.8 m/s2。其输出为1.65 V。如果某一轴只受到重力加速度的作用1g,则该轴的输出电压为2.45 V。如果沿着某一个方向活动,或者受到重力作用,输出电压就会根据其运动方向以及设定的传感器灵敏度而改变其输出电压。因此用单片机的A/D转换器读取此输出信号,就可以检测其运动和方向。终端1和终端2的XY平面平行人体的冠状面,且X轴方向平行于人体的垂直轴指向腿的根部;Y轴平行于人体的冠状轴朝外指向;Z轴平行于人体的矢状轴朝下指向。所以当人体平躺准备训练时X轴、Y轴、Z轴的加速度大小分别为0g、0g、1g。
1.2 数据处理部分设计
数据的处理工作主要是由上位机来完成,对数据的处理包括加速度信号的滤波去噪、特征值的提取与选择和设计分类器对采集的加速度信号进行动作的判断。
1.2.1 信号的平滑与加窗
若由终端采集的信息有比较多的毛刺,则需要对其进行滤波处理。采用五点三次的平滑器对信号进行平滑滤波,同时运用固定阈值法对加速度信息进行加窗处理判断动作的始终点,且将静止时的平均加速度作为固定的阈值。
1.2.2 基于小波变换的特征值的提取
在对加速度信号在频域上分析时,发现加速度信号主要集中在0~10 Hz频率范围内,这段频率范围之内,保存着加速度信号的绝大部分信息和重力加速度的分量信息。加速度传感器是压电传感器,这个分量在运动过程中是变化的,但由于加速度传感器在每个人下肢上的位置固定,所以影响是几乎相同的,因此采用小波分析对0~10 Hz的频域信息进行分析与提取,避免了利用其它特征量,例如AR系数而引入的随机误差等因素,有利于降低系统的设计难度。
小波分析是一种窗口面积固定但其形状可改变的时域局部化分析方法,这里的窗口包括时间窗和频率窗;在低频部分具有较高的频率分辨率和较低时间分辨率,在高频部分有较高的时间分辨率和较低的频率分辨率,因而小波分析能够聚焦到信号的细节部分。一般情况下,在利用小波变换进行特征提取时,大多选择某一尺度上的小波系数代替原始信号进行识别处理,而不同尺度下的小波系数代表信号不同频率区域分量的大小,若其它尺度上的小波系数被丢弃,则会使得分辨率下降[9]。所以,采用保留全部系数的Haar小波变换对加速度信号进行4层的小波变换,首先对原始信号进行第一层的分解,将信号分解为0~50 Hz的低频系数向量和50~100 Hz的高频系数的系数向量;再将低频的系数向量继续分解,分解为0~25 Hz的低频系数向量和25~50 Hz的高频系数向量,依此类推,最后得到5个频率段的小波的系数向量分别为最后得到5个频率段的小波的系数向量分别为:CD1、CD2、CD3、CD4、CD5,并将5个小波系数向量合并。
1.2.3 特征值的选择
在设计一个分类器的时候,必须要设法减少特征的数目,这样一方面可以得到较高的维数比率,避免维数过多而造成维数灾难,提高分类器的推广能力,另一方面可以得到和理论值相近的正确率率估计值[3]。也就是特征值的选择问题,简单来说,就是剔除对样本的识别没有价值的特征量,保留有利于样本特征识别的特征子集,也就是剔除冗余特征的过程。
粒子群算法(particle swarm optimization,PSO)是模拟鸟群的捕食行为,也就是鸟群在某区域内寻找未知位置食物的过程,虽然不知道食物的具体位置,可是他们知道本身离食物的位置有多远,所以最简单最快找到食物的方法就是搜索当前离食物最近的鸟的周边区域。则算法的基本思想是每次迭代都是通过跟踪更新局部最优解和全局最优解来更新自己的位置,最终找到最优解的过程。PSO算法更新为式中,v是粒子的速度,present是粒子的当前位置,pbest为粒子的局部最优解,gbest为粒子群的全局最优解。rand是(0,1)之间的随机数,c1和c2被称作学习因子。通常,c1=c2=2。w是加权系数(惯性权重),取值在0.1到0.9之间。粒子通过不断学习更新,最终飞至解空间中最优解所在的位置,搜索过程结束。最后输出的 gbest就是全局最优解[10]。
本算法选取的目标函数为函数的拟合误差RMSE如式(3)所示。其中g(i)为加速度小波分解后特征量的幅值大小,f(i)为拟合函数的幅值大小;拟合方法采用的是线性插值拟合,拟合函数f(x)的公式如式(4)所示,其中ai为所选取的特征值对应的频率的大小。
本系统需要利用粒子群算法来实现多目标的寻优,也就是要通过粒子群算法来求得一组最优解集。即将一组特征集视作一个n维的粒子(n为特征集的大小,设置为10),所选择的适应度函数为曲线的拟合方差大小,所以经过多目标粒子群算法优化后得到的为失真度最小的特征向量集,且特征向量维数也降至10维。相对于其他的多目标寻优如基于遗传算法的多目标寻优算法、基于蚁群算法的多目标寻优算法等,基于粒子群算法的多目标寻优算法的优化过程要快得多,更加适用于实时的监护系统设计。
1.2.4 BP分类器的设计
在提取出特征量以后将设计一分类器对所采集的加速度信息进行分类,本系统所需要设计的是一种针对于多分类的分类器。本研究的多输出型的BP分类器的结构采用的是一个多输出的三层BP网络结构,其拓扑结构为20-15-4。网络中输入层的节点数即为特征矢量的维数,在前面分析中已经分别将大腿和小腿上的加速度信号经过特征提取后降为10维的特征向量,故将输入层的节点数设置为20个节点;隐含层的节点个数由经验公式取得;输出层的节点个数由动作的输出类别决定,因此将输出层设置成4个节点,分别对应规范抬腿、保持时间太短、抬腿过高和非平行抬腿。
网络的传输函数选择非线性的S型函数Sigmoid函数,实现非线性的输出到输入的映射。网络选取[01]之间的随机数作为初始的权值,节点阈值均设置为零。如果网络的输出层输出样本的类别为j,则输出的第j个节点输出为1,而其余的节点输出为0。
由于运动加速度信息在小波分解后特征量的规律性并不强,而且受患者个体性的影响,每位患者的运动信息会有较大的差异,BP网络的自适应性和容错性能很好的解决这类因素的影响,并且在网络训练完成后数据处理的时间将大大减少,相比其他分类器也更加适合于实时的监护系统。
2 结果
图2为在训练阶段从终端2采集到的原始的三轴加速度信号,从图中可以看出加速度曲线有较多的毛刺。
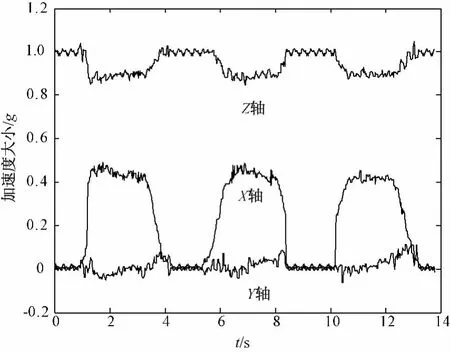
图2 终端2三轴加速度原始信号Fig.2 Triaxial accelerometer signal of terminal 2
图3为进过五点三次的平滑滤波和阈值加窗后的加速度波形,从图中可以看出,加速度曲线变得平滑,同时有效的提取了抬腿时的加速度信号。
对上述处理后的加速度信号进行小波分解,图4表示加速度信号经过Haar小波变换后的波形曲线。经过小波变换后将加速度信号变换成200维的小波特征向量。
将得到的200维的特征向量运用粒子群优化算法进行特征量的提取。如图5所示,经过特征值提取后所得到的10维的小波特征量,有效地降低了特征向量的维数。
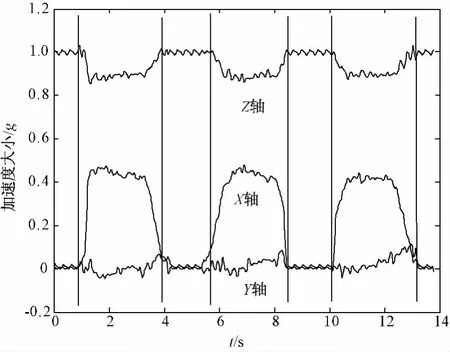
图3 经平滑加窗后的加速度信号Fig.3 Smoothing and windowing processing of the acceleration signal
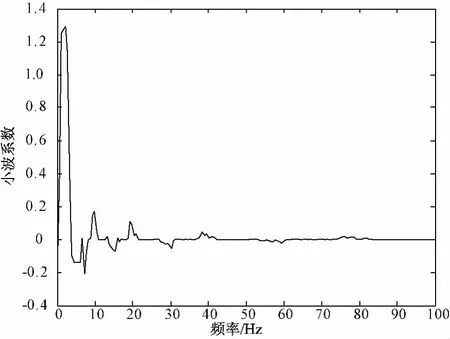
图4 加速度信号小波分解曲线Fig.4 Acceleration signal wavelet decomposition graph
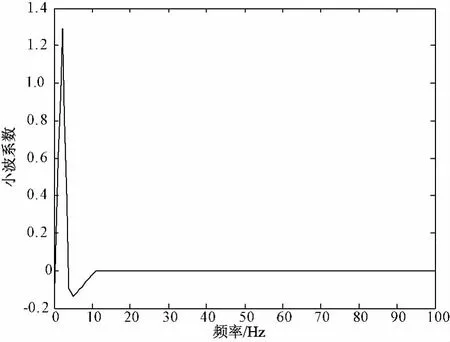
图5 特征向量经特征值提取后曲线图Fig.5 The characteristic value extraction graph
最后采用K-折交叉验证来对分类法的准确率进行评价。K-重交叉验证是将初始的数据均等分成 k组分别记为 S1,S2,S3,…,Sk。然后从 k 组中选择第i组作为测试组,其余k-1组作为训练组训练BP网络,如果测试的准确率大于RATE(RATE为给定的准确率),则结束此轮的学习;否则将测试样本作为训练样本训练BP网络。其中准确率=测试样本的正确分类数/测试样本总数。如此反复训练和测试k次。即对i=1,2,3…,k进行 k次迭代,最终获得的准确率是k次迭代中所有的正确分类数除以样本总数的大小。
针对可能出现的不规范动作:保持时间太短、抬腿过高和非平行抬腿三个不规范动作和规范抬腿动作等4类动作进行采样和分类实验。实验对象为年龄在24~30周岁之间的20名健康男性,将他们从1到20进行编号。实验中要求测试者分别进行规范抬腿、保持时间太短、抬腿过高和非平行抬腿的训练,每个动作的训练均为40次。将每个训练者的160组数据分成8等份进行8重的交叉验证。
在对实验样本进行检验和识别的过程中可能发生两种错误:
1)当原样本为真时拒绝原样本,称作弃真错误,即α错误;
2)当原样本为假时没有拒绝原样本,称作取伪错误,即β错误。
测试过程中用取真概率1-P(α)和去伪概率1-P(β)这两个指标来评价系统的性能。
从表1的测试结果中可以看出交叉验证中的取真概率平均值在85%以上,其中对于训练中保持时间太短这一不规范动作的识别最为精确,对规范抬腿的识别率最低;去伪的概率也在91%以上,能有效排除非本标签的动作类别;且各类动作的平均取真率最低为89.1%,平均取真率最高为93.4%,各类动作的取真率和去伪率的标准差均小于2.3%,具有良好的准确性和稳定性。
3 讨论与结论
通过以上实验表明通过采集加速度信息,并对其进行滤波、加窗、小波分解和特征值提取后,最后在分类器上实现动作的分类。能够有效的区分动作差异不大的同类动作,并且对规范抬腿、抬腿过高、保持时间太短和非平行抬腿这4类训练取真率的均值和标准差也分别达到了(89.1±2.0)%、(93.4±1.7)%、(89.5±2.3)%、(90.1±1.8)%。达到了预期的分类效果。
本研究提出了基于ZigBee的膝骨性关节炎保健操运动质量评估系统设计,具有低功耗、方便、直接、有效的优点。并且通过实验,系统对于直腿抬高训练中的不规范动作的识别率都达到了预期的效果,能够将三种不规范动作有效地识别。该系统性价比高、体积小、功耗低,在针对膝骨性关节炎保健操的运动监护领域具有实际应用的价值。
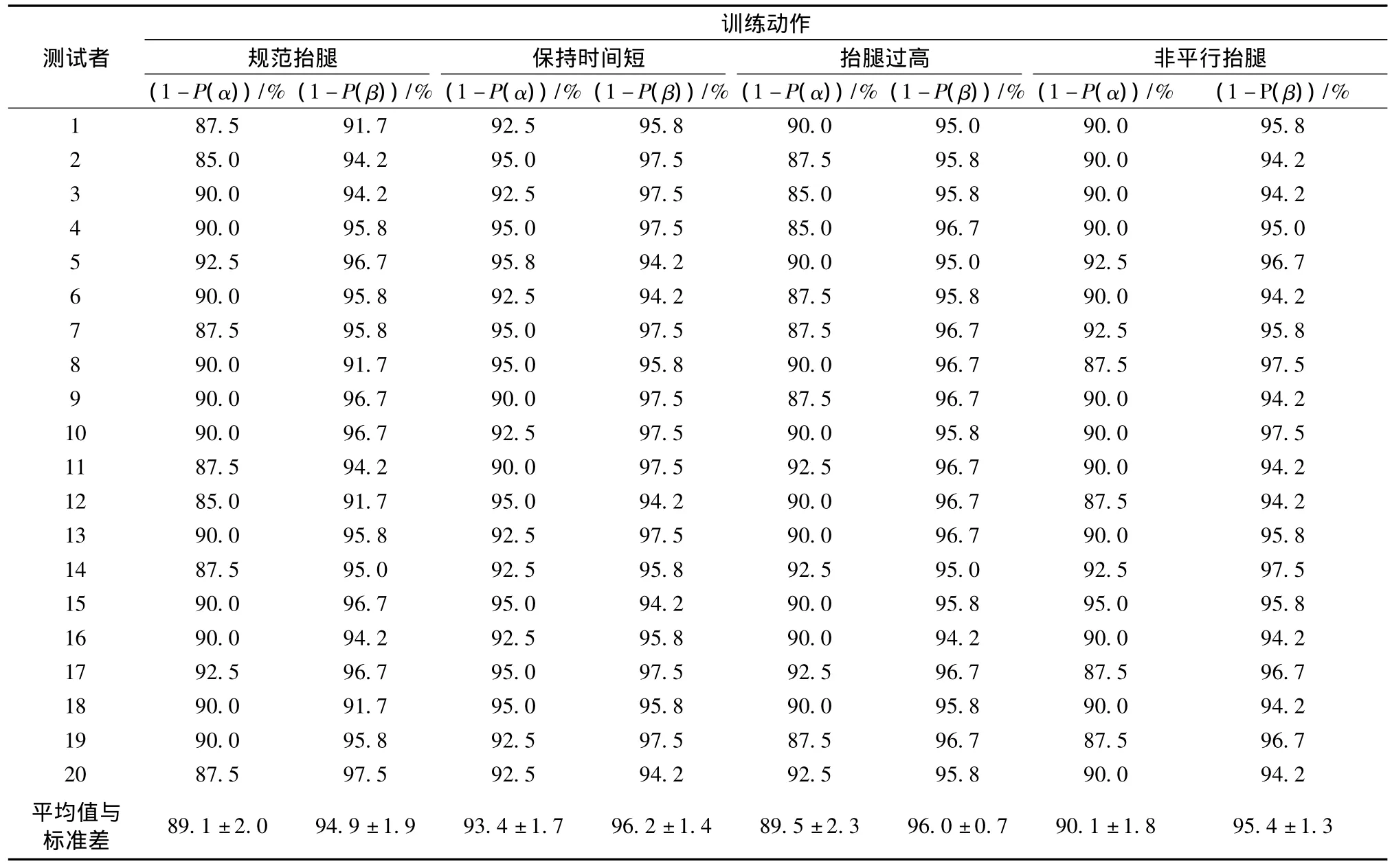
表1 交叉验证测试结果Tab.1 Cross-validation test results
本研究仅对基于加速度传感器的骨性关节炎运动监护系统的信息处理算法的有效性进行了验证,所设计系统最终目的在于实时评判患者的运动状态,并以听觉或触觉等形式对患者进行结果反馈,使患者进行主动训练。运动结束后,将本次运动治疗的动作质量状况传递给医护人员,帮助医护人员了解患者的治疗情况,并制定下一步的运动处方。因此下一步的研究工作有两个方向,一是在智能手机等通用的手持设备中进行信息处理,进行实时评判和反馈,训练结束后将患者的动作完成情况发送给医生;二是研究更合适的数据处理算法,以提高规范性判别的准确率,并将该方案推广到膝骨性关节炎其他的运动疗法中。
[1]梁平,李胜利.膝骨性关节炎的临床治疗进展[J].中国中医骨伤科杂志,2006,14(3):65 -67.
[2]Shull P,Lurie K,Shin M,et al.Haptic gait retraining for knee osteoarthritis treatment[C]//Proceedings of the IEEE Haptics Symposium 2010.Waltham:IEEE,2010:409 -416.
[3]Wrigley TV,Simic M,Hunt MA,et al.Real-time movement biofeedback for walking gait modification in knee osteoarthritis[C]//Proceedings of the Virtual Rehabilitation International Conference 2009.Haifa:IEEE,2009:132 -135.
[4]沈钦荣.中医药治疗膝骨性关节炎实验研究进展[J].中国中医药科技杂志,2004,11(6):389 -390.
[5]郝高庭,黄有荣.自然疗法治疗膝骨性关节炎近况[J].浙江中西医结合杂志,2010,20(5):326-327.
[6]李声飞.基于WSN的穿戴式人体姿态与健康监护系统的研制[D].重庆:重庆大学,2010.
[7]Taylor PE,Almeida JM,Kanade T,et al.Classifying human motion quality for knee osteoarthritis using accelerometers[C]//Proceedings of the 32nd Annual International Conference of the IEEE EMBS Buenos Aires.Argentina:IEEE,2010:339 -343.
[8]Taylor PE,Almeida DA,Hodgins JK,et al. Multi-label classification for the analysis of human motion quality[C]//Proceedings of the 34th Annual International Conference of the IEEE EMBS.San Diego:IEEE,2012:2214 -2218.
[9]Nyan MN,Tay FE,Murugasu E.A wearable system forpreimpaet fall detection[J].Joumai of Biomechanics,2008,41(12):3475-3481.
[10]王昌喜,扬先军,徐强,等.基于三维加速度传感器的上肢动作识别系统[J].传感技术学报,2010,23(6):816 -819.
[11]Wu Guangrong,Zhang Jiaxiong.Realization of wireless sensor network based on CC2430[J].Modern Electronics Technique,2008,31(12):121 -123.
[12]YunXiaoping,Bachmarm E,McGheeR. A simplified quaternion based algorithm for orientation estimation from Earth gravityand magnetic field measurements[J].IEEE Transactions on Instrumentatfon and Measurement,2008,57(3):638 -650.
[13]邓亚平,杨佳,胡亚明.动态分簇的导构传感器网络安全路由协议[J].重庆邮电大学学报,自然科学版,2011,23(3):336-342.
[14]Tentori M,Favela J.Activity-aware computing for healthcare[J].IEEE Pervasive Computing,2008,8(5):51 -57.
[15]Stiefmeier T,Roggen D,Ogris G,et al.Wearable activity tracking in car manufacturing[J].IEEE Pervasive Computing,2008,7(2):55 -62.
[16]Choudhury T,Borriello G,Consolvo S,et al.The mobile sensing platform:an embedded activity recognition system[J].IEEE Pervasive Computing,2008,7(2):32-41.
[17]Yang Junying,Wang Jeenshing,Chen Yenping. Usingacceleration measurements for activity recognition:an effective learning algorithm for constructing neural classifiers[J].Pattern Recognition Letters,2008,29(1):2213 -2220.
[18]田建勋,陈香,李云,等.一种基于加速度与表面肌电信息融合和统计语言模型的连续手语识别方法[J].中国生物医学工程学报,2011,30(3):333 -339.
[19]肖金壮,齐佳龙,王洪瑞.基于小波分析的人体平衡指标提取方法研究[J].中国生物医学工程学,2012,31(7):507-511.
[20]高春芳,吕宝粮,马家昕.一种用小波包变换提取眼电信号警觉度特征的方法[J].中国生物医学工程学报,2012,31(5):641-648.
[21]支联合,谭素敏,杨建国.基于小波包变换的特征提取方法分析fMRI数据[J].中国生物医学工程学报,2012,31(6):956-961.
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
当代水产(2022年6期)2022-06-29
疯狂英语·新读写(2021年10期)2021-12-07
科技风(2021年19期)2021-09-07
中老年保健(2021年10期)2021-08-24
电子制作(2019年13期)2020-01-14
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
制造技术与机床(2017年10期)2017-11-28