
受静力潜艇的潜浮运动仿真分析*
2013-11-23 04:18:48
舰船电子工程 2013年5期
(海军潜艇学院 青岛 266042)
1 引言
当潜艇以一定航速作定常运动时,若垂直面受到力的作用,会影响其潜浮运动状态。当潜艇在不同的航速作定常运动时,相同的力对潜艇潜浮运动产生的效果并不相同。即使潜艇在相同的航速作定常运动时,相同的力作用在潜艇的位置不同产生的潜浮运动效果也不相同。
2 受静力潜艇潜浮运动分析
当潜艇以一定航速作定常运动时,若受到力p(例如,操舵引起的舵力,或注排水引起的浮力差)的持续作用,一般情况下,还会引起力矩Mp=-plp(lp为有符号长度,在重心前为正,在重心后为负),如图1所示。

图1 力臂间的关系
F为有冲角水动力作用点,对艇型确定的艇可以视为定值,称为水动力中心。
lW为有冲角水动力作用点F至潜艇重心的距离。
C为潜浮点(也称临界点,逆速点)。C点的位置随航速变化,增速时C点向首移,减速时C点向尾移。
若p不大,相对于艇的排水量为一小量时,潜艇受力p的作用,经过一段非定常运动后(不操舵控制)。潜艇最终将进入一新的定常直线潜浮运动,相对于原等速定深运动来讲,新的定常直线潜浮运动平衡方程可以简化成如下形式[1]:

由式(1)可解得:
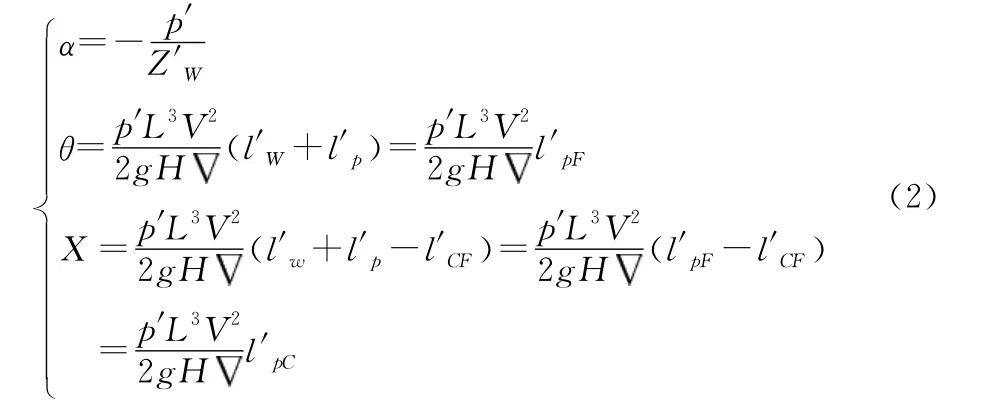
式中:


式(2)表明纵倾角的大小取决静载对于水动力中心点F的力矩,l′pF=(l′p+l′w)是静载造成潜浮角的有效力臂;潜浮角的大小取决静载对于临界点C的力矩。l′pc=(l′pF-l′CF)是静载造成潜浮角的有效力臂。因此研究静载P与临界点C和水动力中心点F的位置关系对于判定潜艇的运动态势具有重要的意义。
l′CF为点C与点F间的距离lCF的无因次量因为Z′W<0,M′W>0,所以l′CF为正数。由式(4)可以看出:当V增大时,l′CF减小,说明C点向艇首移动;当V减小时,l′CF增大,说明C点向艇尾移动。由于l′CF的大小与V2成反比,因此,C点的移动受V的影响很大。
当P作用在潜艇的纵向位置不同或者尽管P作用的位置不变,但由于V的变化引起C点移动,使P的作用点与C点的相对位置发生变化时,将使潜艇的运动状态发生变化。下面我们研究潜艇的航速V对C点位置的影响。
图2为模型潜艇不同的航速下潜浮点的位置(相对于潜艇的重心)曲线。
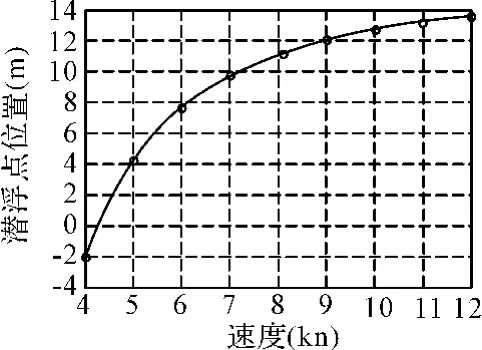
图2 潜浮点的位置与航速的关系曲线
3 仿真分析
在水下航行时,已经均衡好的潜艇经常会由于海区海水密度的变化、淡水和燃油消耗等原因而引起潜艇的重力或者浮力的变化,从而导致潜艇深度的变化。下面对模型潜艇受到垂直面上静力后的运动特性进行仿真分析。
要分析潜艇受到垂直面上的静力后的运动特性,不是一般性地假设静力为舱室进水2t,并在100s时排除进水。
仿真条件1:设定航行深度为50m,潜艇在40s时,I舱破损导致少量进水。
图3为潜艇在不同航速条件下I舱进水的仿真结果。
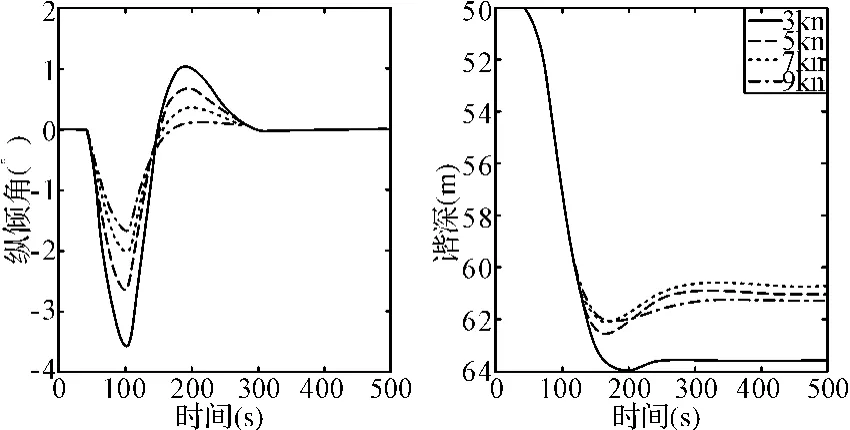
图3 Ⅰ舱进水的仿真结果
仿真条件2:设定航行深度为50m,潜艇在40s时,Ⅶ舱破损导致少量进水。
图4为潜艇在不同航速条件下Ⅶ舱进水的仿真结果。
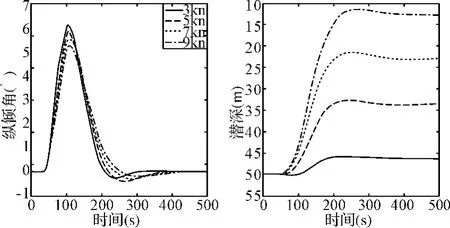
图4 Ⅶ舱进水的仿真结果
分析图3和图4可以得出如下结论:
1)当Ⅶ舱破损进水的时候,潜艇在航速3kn时,其纵倾角和深度在受到扰动后大约经过210s的时间再次趋于稳定;而在航速9kn时,其纵倾角和深度在受到扰动后大约经过320s的时间才能再次趋于稳定。因此,潜艇在受到破损进水扰动后,其低速航行时的定深稳定性要优于潜艇高速航行时。
2)当Ⅰ舱破损进水和Ⅶ舱破损进水时,对比相同航速下,潜艇纵倾角的最大变化量。当潜艇的航速为3kn时,Ⅰ舱破损进水时纵倾角的变化量为3.6°;而此时Ⅶ舱破损进水时纵倾角的变化量为6.1°。说明在相同的航速下,潜艇Ⅶ舱破损进水时的扰动对纵倾角的影响要大于Ⅰ舱破损进水时。这是由于模型潜艇的水动力中心点F靠近艇首,即当Ⅶ舱破损进水时载荷作用点P与F点的纵倾有效力臂l′PF要大于Ⅰ舱破损进水时。因此,Ⅶ舱破损进水时对纵倾角的影响比Ⅰ舱破损进水时更明显。
3)当Ⅰ舱破损进水时,潜艇在航速3kn时纵倾角的变化量为3.6°,而航速9kn时纵倾角的变化量为1.7°;而Ⅶ舱破损进水时,潜艇在航速3kn时纵倾角的变化量为6.1°,而航速9kn时纵倾角的变化量为5.1°。说明当受到垂直面扰动时,潜艇纵倾角的变化量都是随着潜艇航速的增加而减小的。这是由于潜艇航速越小,产生的有冲角水动力越小,而扰动力相同,所以航速越高,潜艇的纵倾角越小。
4)在Ⅰ舱破损进水排出之前,潜艇的深度变化量随着速度的增加而减小;在Ⅶ舱破损进水排出之前,潜艇的深度变化量随着速度的增加而增加。这是由于随着潜艇航速的增加,潜浮点C的位置向艇首移动,从而使C点距离Ⅰ舱越来越近,距离Ⅶ舱越来越远。这就导致当Ⅰ舱进水时,载荷作用点P与潜浮点C的潜浮有效力臂l′CP随航速增大而减小;当Ⅶ舱进水时,载荷作用点P与潜浮点C的潜浮有效力臂l′CP随航速增大而增加,从而出现上述仿真结果。
仿真条件3:假设潜艇航行深度为50m,航速3kn,仿真开始40s时发生舱室破损导致少量进水,进水量为2t,1min后堵漏成功并将进水排出,进水舱室分别为Ⅰ舱、Ⅲ舱、Ⅴ舱和Ⅶ舱。
图5为不同舱室进水情况下的纵倾及深度变化曲线。
分析图5可得如下结论:
1)潜艇在航速为3kn时,Ⅶ舱进水后,潜艇先进行尾倾上浮运动,然后在扰动消除后,其深度逐渐趋于稳定;而Ⅴ舱进水后,潜艇先进行尾倾下潜运动,然后在扰动消除后,其深度逐渐趋于稳定;而Ⅰ舱和Ⅲ舱进水后,潜艇先进行首倾下潜运动,然后在扰动消除后,其深度逐渐趋于稳定。这说明潜艇在航速为3kn时,其潜浮点C位于Ⅴ舱和Ⅶ舱之间,而水动力中心点F位于潜艇Ⅲ舱和Ⅴ舱之间。
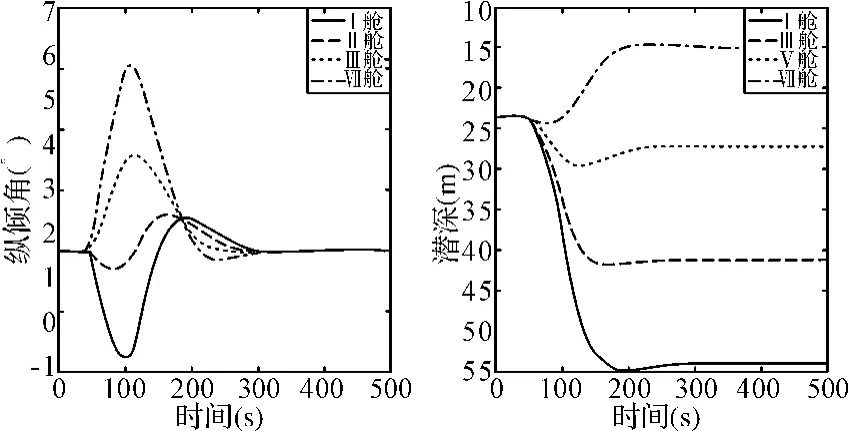
图5 航速为3kn的潜艇不同舱室进水的仿真结果
2)潜艇在航速为3kn时,对比不同舱室进水后,潜艇的纵倾角的变化量最小的是Ⅲ舱进水时;而深度变化量最小的是Ⅴ舱进水时。注意到当潜艇的航速为3kn时,四个舱室中距离水动力中心点F最近的舱室是Ⅲ舱,而距离潜浮点C最近的舱室是Ⅴ舱。这说明潜艇航速和受到的扰动力一定时,其纵倾角的稳定性取决于扰动力作用点与水动力中心点F的距离,距离越近,纵倾角稳定性越好;潜艇的深度稳定性取决于扰动力作用点与潜浮点C的距离,距离越近,深度的稳定性越好。
4 结语
本文通过对受静力潜艇的潜浮运动进行仿真分析得出以下几点结论:
1)力对水动力中心点F的力矩引起纵倾角θ,θ的大小与力和力臂lpF成正比,θ的符号,根据力对F点的力矩用右手法则在Gxyz坐标系中确定;力对潜浮点C的力矩使艇产生潜浮角x,x的大小与力和力臂lpC成正比。x的符号,根据力对C点的力矩用右手法则在Gxyz坐标系中确定。
2)潜艇的有冲角水动力作用点F偏于首部,首升降舵的纵倾有效力臂lbF远小于尾舵的纵倾有效力臂lsF,所以尾舵对纵倾的控制比首升降舵更为有效。
3)首尾升降舵的作用效果随航速而变,高速时临界点C前移,使尾舵舵力作用点距C点的距离比首升降舵舵力作用点距C点的距离大得多,所以首升降舵控制深度和纵倾的作用越来越小,应操尾舵。低速时,由于C点后移,操首升降舵变深机动效果增大,尤其航速处于尾舵逆速附近时,操首升降舵显得更加有效。
[1]王路克.潜艇空间机动及控制[J].船海工程,2001(4).
[2]徐亦凡.潜艇操纵原理与方法[M].北京:兵器工业出版社,2002.8.
[3]胡坤,张洪刚.潜艇水下空间机动仿真分析[J].计算机仿真,2006,23(5).
[4]陈俊峰,田巍,车梦虎.潜艇定深旋回控制仿真分析[J].舰船科学技术,2007,29(2).
[5]于东宾,周轶美,孙元泉.关于回转机动时的横倾控制[J].船舶力学,1999,3(1):37-43.
[6]牟军,许汉珍.潜艇水平面运动的滑模控制[J].计算技术与自动化.舰船科学技术,1997,16(3):22-25.
[7]夏国泽.船舶流体力学[M].武汉:华中科技大学出版社,2003.
[8]罗凯,李俊,许汉珍.潜艇水平面运动的非线性滑动控制[J].华中理工大学学报,1999,11(27).
[9]牟军,许汉珍.操纵面对潜艇水平面回转横倾角的控制[J].华中理工大学学报,1997,25(8).
[10]赵建设,龚绪林.基于HLA 的潜艇指控战术训练系统研究[J].计算机与数字工程,2011,39(9).
[11]施生达.潜艇操纵性[M].北京:国防工业出版社,1995,(4).
猜你喜欢
中国机械工程(2023年17期)2023-09-19 06:46:22
农业装备与车辆工程(2022年4期)2022-10-31 10:21:48
星星·散文诗(2022年34期)2022-09-03 09:23:43
高师理科学刊(2022年4期)2022-05-09 11:41:58
导航定位学报(2022年2期)2022-04-11 03:17:34
初中生学习指导·提升版(2022年2期)2022-03-08 22:22:28
铁道通信信号(2019年4期)2019-10-10 03:42:38
高中生学习·高三版(2017年9期)2017-10-26 01:17:49
中国煤炭(2016年9期)2016-06-15 20:29:53
电测与仪表(2015年18期)2015-04-12 00:45:24
