
基于DSP 的平面电机控制系统设计
2013-11-22 07:51李晓飞刘新妹殷俊玲
微特电机 2013年9期
李晓飞,赵 敏,刘新妹,殷俊玲
(中北大学,山西太原030051)
0 引 言
随着数字控制技术、电力电子技术及控制理论和方法的快速发展,使用单片机实现平面电机的运动控制系统,已经不能满足高精度控制领域的进一步要求,急需采用一些新的方法和技术对原有的方法进行改进,DSP 集微控制器和高性能数字信号处理等特点于一身,具有强大的控制和信号处理能力,能够实现复杂的控制算法,特别适合于平面电机控制系统的开发。DSP[1-2]控制技术具有灵活、精确、抗干扰能力强、速度快、性能稳定等优点,已广泛应用于电机控制、激光打印机、扫描仪和复印机以及网络控制器等诸多领域。使用DSP 实现数字控制系统已成为未来的发展趋势。
1 控制系统组成
本平面电机控制系统主要由被控对象平面电机、控制器模块[1]、位置反馈模块、驱动模块和电源管理模块几部分构成,同时配合人机交互界面实现平面电机运动模式的改变等。
1.1 平面电机
平面电机(以下简称LSPM)[3-5]由一个齿状结构的定子和一个带位置传感器的动子组成。图1 为LSPM 的实物图。在LSPM 动子中有4 个电磁模块,每个电磁模块由两相电流驱动,即A 相和B 相,通过产生磁阻力驱动动子到达一个新的平衡点。3 个高精度位置传感器是用来报告动子的更新位置,其中1 个传感器用于报告Y 方向更新位置,另2 个传感器用于报告X1 和X2 方向的更新位置,X1 和X2方向的传感器成中心对称分布,故不仅可检测X 方向误差,还可以检测偏航误差。LSPM 不同于传统的平面步进电动机,它采用独特的气浮结构,使其运动摩擦力接近于零,且在高速运动下LSPM 的推力远大于步进电机,LSPM 最大推力为75 N,最大速度为0.9 m/s。且XY 工作台精度±15 μm,位置传感器分辨率1 μm。此外,它还有很多独特的功能,如偏航控制、自动校准、自动归位、停滞检测、误差补偿等。

图1 LSPM 实物图
LSPM 是将电能直接转换成二维平面平移运动的机械能,无需引入机械转换或传动机构,且运动平面保持在同一高度的执行装置。平面电机控制系统[7-8]可以分别实现X 方向和Y 方向的位置控制,但由于各轴之间存在电磁耦合,故很难精确实现各轴的独立运动控制。本文使用4 轴运动控制卡PCI-4P 卡作为控制器模块,可以实现各轴的独立控制,互不影响。平面电机具有结构简单、控制精度高、速度高和稳定性强等特点,故常被应用于高精度控制领域中。
1.2 控制器模块
综合平面电机控制系统的硬件资源要求,在对控制器模块[6]进行选择时芯片的选型是一个非常重要的环节。在考虑到是否满足硬件资源最小要求的前提下,DSP 芯片的型号决定了外围电路及系统的其他电路的设计依据。DSP 的选型受芯片的运算速度、算法格式、系统精度、处理速度、功耗、稳定性等多种综合因素的制约。
考虑LSPM 的特点,根据位置反馈模块接口、驱动器的输入和输出接口及人机交互界面的要求后,在基于DSP 的平面电机控制系统设计中,我们选择PCI-4P 运动控制卡作为控制系统的控制器模块。PCI-4P 卡整合了Flash 存储器、快速A/D 转换器、PWM 模块、PCI 模块、多通道缓冲串口等外设。
PCI-4P 卡是4 轴运动控制卡,使用DDA(Digital Differential Anlyzer)方法给每一个轴发送递增的脉波,完成4 轴的运动控制。它也能通过编码器读取反馈值,非常适合于脉波型伺服电动机和步进电动机的控制。PCI-4P 卡具有以下特点:4 轴伺服/步进电动机控制,每轴可独立控制,互不影响;片内具有128 k 字节的Flash,可以将控制程序直接烧写到Flash 中,实现控制系统的开机上电运行;可选择三种脉冲输出模式:STEP/DIR,CW/CCW 与A/B,差动脉波输出降低干扰;非对称直线加/减速驱动、S曲线加/减速驱动;3 轴线性插补,2 轴圆弧插补等,特别适合于平面电机控制系统的开发。图2 为PCI-4P 卡实物图。
图2 PCI-4P 卡实物图
1.3 位置反馈模块
平面电机一般通过直线传感器(光栅尺或磁栅尺)对某运动方向提供实时位置信息反馈,速度信息一般通过在一定时间内计算位置信息的斜率间接得到。因此,一块DSP 芯片实现平面电机在两个方向控制的前提是芯片能够提供两路相互独立的位移实时检测接口。
1.4 驱动模块
针对本系统所选DSP 芯片及外围设备,所选驱动模块必须保证系统的正常动作。LMDX 伺服驱动器由一块电源板、四块PU2 电流放大器、一块UC48板、一块MB5 主板、一块PAT 板、一块IDP4 板和一块DSP C32 板。电源板提供± 36 V 的电压给PU2,提供+ 5 V 和± 12V 的电压给MB5、PAT、UC48、IDP4 和DSP C32 板。电机通过PU2 提供的电流来动作。PU2-1 驱动X1 轴,PU2-2 驱动X2 轴,PU2-3 驱动Y1 轴和PU2-4 驱动Y2 轴。伺服板UC48 接收HS4 输出的信号,发送指令到PU2。当DSP C32 通过RS-232 接收从PC 传出的命令时,IDP4 可用于接收主机控制器或PLC (programmable logic circuit)的命令。图3 为LMDX 实物图。

图3 LMDX 实物图
1.5 人机交互界面
通过人机交互界面进行计算机与电机之间的双向信息交换。当程序烧写到芯片内存后,程序按一定的顺序被执行。一般来说,当程序运行后,平面电机的运行方式(如位置指令)无法在线调整,因此要借助人机交互方式,对电机运行状态或控制参数进行实时调整与改变。图4 为PCI-4P 卡安装完成后的人机交互界面Motion Maker,在此界面可以进行机械参数设置、初始化设定、电机运动(包括直线运动、点动、返回等)参数设置等。
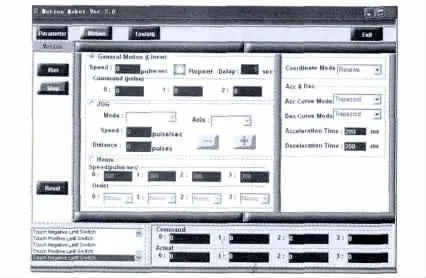
图4 Motion Maker 人机交互界面
2 硬件系统设计
控制器要实现平面电机三自由度同步控制,需采集电流信号、位置信号、AD 校正参考电压、输出PWM 信号,还需实现AD 采样校正、数字滤波、位置伺服控制、电流控制等算法。要完成上述复杂工作,本文采用高集成度的运动控制卡PCI-4P 来实现。PCI-4P 集成了PCI 模块、CAN 总线模块、AD 转换器模块和PWM 模块等,DSP 控制系统硬件电路结构如图5 所示。

图5 DSP 控制系统硬件电路结构
本文采用“PC + DSP”的控制模式,PC 机利用其丰富的软件功能,主要负责信息流和数据流的管理,以及从运动控制卡读取未知数据,并经过计算后将控制指令发给运动控制卡。DSP 负责判断动子位置信息,实时计算移动速度,并将其信息反馈给上位机,实现数字PI 调节并产生频率固定、占空比变化的PWM 信号作为功率开关的驱动信号。驱动器[9]控制模式采用编码器速度控制,驱动器接收运动控制卡发送的信号,通过内部的PWM 模块实现平面电机运动控制,并通过反馈信号调整电机的运动,如此构成一个半闭环的LSPM 控制系统[10]。
3 软件设计
控制系统的软件主要由DSP 实现,DSP 实现的功能包括:主轴控制、进给轴控制、I/O 控制、编码器反馈、原点归位、测试功能、复位功能与上位机通信功能、状态采集、状态管理、还要把从上位机读取的指令转换为执行逻辑,其软件功能结构如图6 所示。
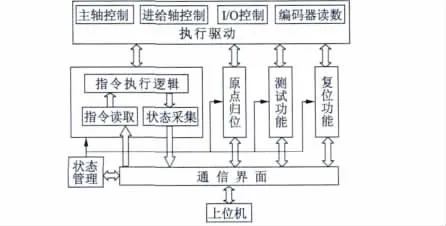
图6 软件功能结构图
在Windows XP 环境下,可直接使用PCI-4P 卡提供的“MCCL(Motion Control Function Library)”运动函数库资源,方便地在VB /VC + + 及其它软件环境中进行编程,实现复杂的控制功能。基于平面电机控制系统软件设计主要分为以下几个部分:初始化程序、当前位置获取及参考点置零程序、参考位置指令程序、PID 算法控制程序、电机起动程序、主程序。程序的执行流程如图7 所示。
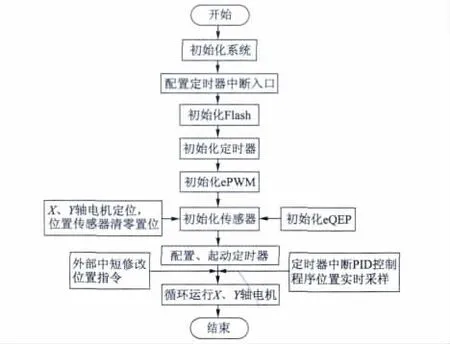
图7 程序执行流程
4 实验测试
4.1 定位精度
让平面电机的Y 轴以点对点的方式运动,对其控制精度进行测试。运行结果如表1 所示。
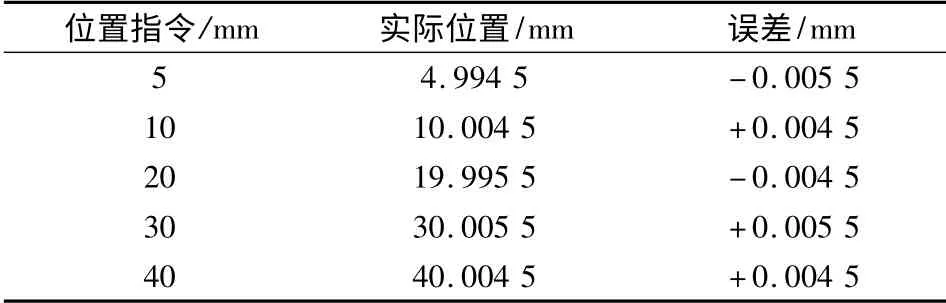
表1 Y 轴定位情况
从表1 可以看出,位置指令从5~40 mm 都可以保证静态定位精度不超过0.005 5 mm。
4.2 动态运行
分别给平面电机X、Y 方向发送同频、同幅的正、余弦脉波信号作为位置控制指令,其动态误差响应曲线如图8(a)和图8(b)所示。由于在各自方向上的动作受外界环境,机械摩擦的影响,使得电机在两个方向的动态误差不完全一致。图8(c)为X、Y方向分别加同幅、同频的正弦和余弦复合指令信号时产生的圆周轨迹,由于气源的不稳定性,使得电机在个别运行区域跟踪误差比较大。综合实验结果说明,基于DSP 的控制器能够精确、有效地实现平面电机的三自由度运动控制。
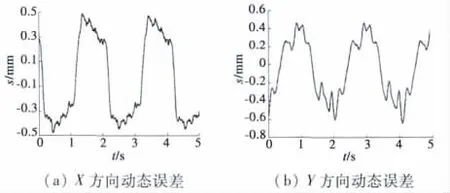
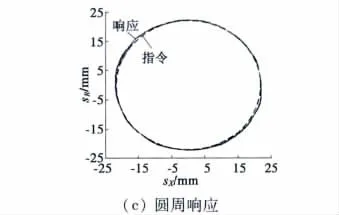
图8 动态响应图
5 结 语
平面电机控制系统经过实际性能测试,均能达到预定的各项系统指标,系统运行稳定。本文的创新之处主要体现在将DSP 技术应用于平面电机,并采用一块DSP 芯片实现了平面电机的二维控制,简化了系统结构和外围电路,降低了系统的开发成本。
[1] 王划一,杨西侠.自动控制原理[M].北京:国防工业出版社,2001.
[2] 王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[3] 张琦.平面电机的控制及其应用前景[J].电子工业专用设备,2000,29(1):48-49.
[4] 潘剑飞,曹广忠,王鑫.基于DSP 的平面开关磁阻电机位置控制系统研究[J].微电机,2009,42(6):38-42.
[5] 曹家勇,朱煜,汪劲松.永磁同步平面电动机三自由度运动控制器[J].中国电机工程学报,2006,26(17):143-147.
[6] 张前,黄学良,周赣.基于双DSP 的平面电动机控制器设计[J].微特电机,2010,8(6):1-4.
[7] Pan J F,Cheung N C,Yang J M.High-precision position control of a novel planar swithed reluctance motor[J].IEEE Transactions on Industrial Electronics,2005,52(6):1644-1652.
[8] Zhao S W,Cheung N C,Pan J F.A self-tuning regulator for the high-precision Position control of a linear swithed reluctance motor[J].IEEE Transactions on Industrial Electronics,2007,54 (5):790-799.
[9] Fujii N,Kihara T.Surface induction motor for two dimensional drive[J].Transactions of IEE of Japan D.1998,118(2):221-228.
[10] Pelta E R .Two-axis sawyer motor for motion systems[J].IEEE Control System Mag,1987,7(5):20-24.
猜你喜欢
机电工程技术(2022年8期)2022-09-22
环球时报(2020-12-05)2020-12-05
初中生学习指导·中考版(2020年10期)2020-09-10
江苏教育(2020年5期)2020-04-26
科技创新与应用(2019年32期)2019-12-02
中学生数理化·高三版(2019年1期)2019-07-03
制造技术与机床(2017年3期)2017-06-23
新课程·小学(2017年2期)2017-03-25
海峡科学(2016年7期)2016-10-14
试题与研究·高考数学(2016年1期)2016-10-13
