
TY5CT型接触网作业车设计
2013-11-12 06:24:04王鸿博朱俊亚张增礼
机械管理开发 2013年3期
王鸿博,朱俊亚,张增礼
(太原轨道交通装备有限责任公司产品开发部,山西太原030009)
0 引言
接触网作业车用于电气化铁路接触网上部设备在停电状态下的安装、调整、检修及日常检查、保养等施工作业,同时可作为牵引车使用。随着我国铁路建设现代化进程的飞速发展,对工程作业车性能提出了更高的要求,在铁路曲线线路外轨超高125mm时,作业就需要平台能够自动调平。TY5CT型接触网作业车可在线路外轨超高200mm的范围内,通过“平台自动控制系统”自动实现作业平台的调平与复位。
1 作业车主要结构及部件
TY5CT型接触网作业车总图,如图1所示,该作业车采用四轴机械传动[1]方式,作业装置动作平稳、准确,作业走行驱动好,作业制动性能正常。其基本构造包括司机室、底架、转向架、动力传动系统、电气系统、制动系统、液压升降回转平台和随车起重机等。整车主要参数,见表1。
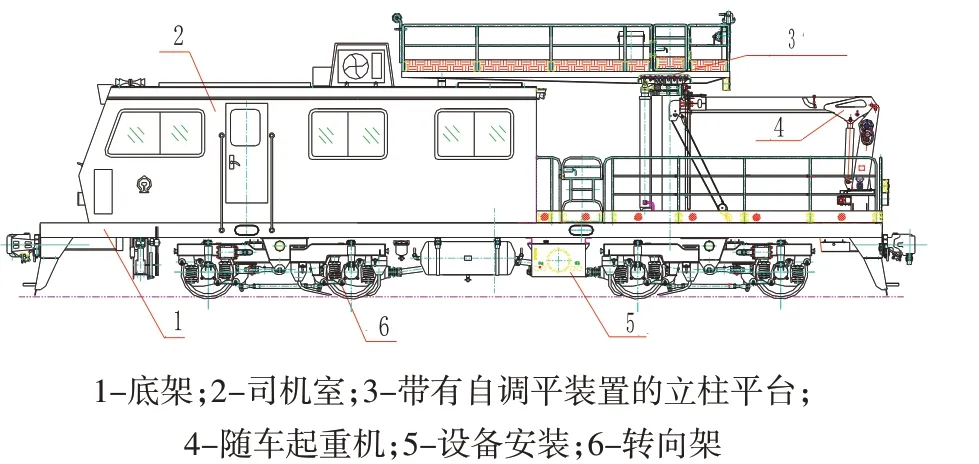
图1TY5CT型接触网作业车总图

表1整车主要参数
1.1 动力传动系统
动力传动系统要满足整机双向区间运行好作业走行速度的要求,还要为正常的电源、液压源和气源提供动力。发动机、离合器和变速箱联接在一起安装于作业车的底架上,变速箱输出扭矩通过万向轴驱动换向箱,换向箱为双端输出,分别驱动前后转向架上的车轴齿轮箱,从而驱动车轴转动。
TY5CT型接触网作业车采用潍柴动力的WP10.336型电喷水冷柴油机作为动力,该柴油机型式为直列、直喷、水冷、六缸、四冲程、增压中冷、高压共轨,额定功率/转速为247kW/2200r/min,最低怠速为(600±50)r/min。燃油喷射系统采用了BOSCH的最新第二代电控高压共轨技术,电子控制单元ECU控制系统,排放可达到国Ⅲ标准。
与相同功率等级的康明斯柴油机相比,具有结构紧凑,使用可靠,动力性、经济性等技术指标优良,起动迅速,操作简单和维护方便,配件供应充分、排放标准高等优点。
传动系统主要由离合器、变速箱、万向节传动轴、换向分动箱、车轴齿轮箱组成。本车采用:原装进口LIPE15/380-2LP型离合器,分段式即范围档换档的富勒RTO-11509F型变速器,为我公司专门定制的TY290型换向分动箱,我公司自主研发的TYT03型车轴齿轮箱。
1.2 司机室
司机室是司乘人员的工作场所,内部设有前、后司机工作台,司机专用座椅、卧铺、工具柜、监控柜、文件柜等设施。外部由钢结构骨架外蒙薄钢板组成,内侧装有装饰板,中间填充隔热阻燃保温材料。装饰板为双贴面防火板。司机室内顶棚中部安装有海尔嵌入式3P冷暖空调,还设有发动机、换向箱吊装天窗,前后安装有电风扇,两侧设有照明灯和音响喇叭。前后挡风玻璃均为电热玻璃,并设有喷水刮雨器,安装雨刮器电机处均设有检修口。侧窗为带有纱窗的推拉式双层结构。
司机室前端设有前照灯、标志灯、百叶窗等,左右两侧和后端各设有入口门,后墙外设有左右两个走台灯,车顶装有风喇叭、警示灯、天线等。
1.3 转向架
转向架为二轴动力转向架,见图2所示,构造速度120km/h。该转向架主要结构为:构架组成、一系悬挂装置、车体支撑装置、牵引装置、车轴齿轮箱悬挂装置、基础制动装置等。一系为轴箱拉杆、螺旋圆弹簧、垂向油压减振器;车体支撑装置为橡胶堆及横向油压减振器;牵引装置采用低位牵引拉杆。基础制动装置为杠杆机构单侧闸瓦制动,设置有闸瓦间隙调整装置。车轴齿轮箱采用抱轴式悬挂方式,用平衡拉杆通过橡胶弹性支撑在构架上。

图2转向架
1.4 制动系统
本车制动系统包括基础制动、空气制动、手制动。基础制动装置位于转向架上,每个转向架安装有两个制动缸,单侧踏面制动方式。闸瓦为货车用高磷铸铁闸瓦,闸瓦间隙调节器为手动调节方式。
空气制动系统包括风源系统、控制系统、辅助系统和制动机系统四个部分。风源系统由主发动机带动一台深圳聚才JC-90型活塞式空气压缩机,额定排气量为1.08m3/min。空气压缩机向总风缸送风,在空压机出风口装有安全阀、止回阀、油水分离器、压力调节阀和减荷阀。油水分离器可将压缩空气中的油及水分离出来,保证总风的清洁干燥。
手制动装置采用货车通用件,由蜗轮蜗杆传动方式收紧手制动链而实现制动并自锁。
1.5 立柱平台
本车安装全液压升降回转平台,主要由立柱、平台、回转机构、升降油缸、自调平装置等组成。
立柱为五边形箱型焊接结构,三节柱体内外相套,外置单作用双级油缸,带动立柱升降。液压马达驱动蜗轮蜗杆减速机带动回转支承实现立柱左右旋转。平台与立柱通过螺栓联接,立柱侧面设有上下平台的升降梯。平台上安装有施工作业装置:拨线机构、导线支撑装置、检测弓架、电气控制箱等。
1.5.1自调平装置
自调平装置主要由液压系统、调平机构、电气(智能控制)系统组成。液压系统包括:液压泵、电磁换向阀、液压马达、升降油缸、管路等,用来驱动平台的调平、复位、升降、旋转动作。调平机构主要由铰接底座、蜗轮蜗杆升降机构、锥齿轮、安装支架、自救手柄等组成。电气(智能控制)系统[2]包括参数传感器、控制屏、控制器(包括PLC、信号采集模块、控制电路板等)。控制器作为整个装置的控制中枢,向各个电磁阀发出命令信号从而实现对液压及机械部分的控制,进而控制立柱平台完成各项指定动作。平台调平试验结果,见图3所示。

图3平台调平试验结果
1.5.2平台的操纵
平台的升降和旋转有两种操纵方式:1)操纵后司机台上的相应旋钮;2)通过显示屏触屏操作。
在伸缩立柱内布置拉线式位移传感器,用于检测平台的升降高度。在立柱底座上安装转角传感器,用于测量平台的旋转角度。传感器输出的电流信号传输到控制器转换成相应的数字信号,经过运算转换成实际的高度、转角值并显示在控制屏(触摸屏)上,操作员根据屏上的显示数据,触控界面上的命令按钮,这些控制命令通过控制器转换为各种数字信号,再由内部的继电器转换为相应的脉冲信号,打开相应的液压油路,从而实现对液压油缸的伸缩及液压马达的转向控制。操作员还可通过触摸屏输入指定数值,控制平台的升降及旋转。
控制屏分主、副双屏的控制模式,即在司机室的后司机台和平台上分别装有主控制屏和副控制屏。两个控制屏对平台的动作具有相同的控制功能,但主控制屏作为最终控制端具有切换控制权的权限,而副屏不具备该权限,提高了操作过程中的安全性。
2 结束语
随着我国铁路建设现代化进程的飞速发展,对工程作业车性能提出了更高的要求。传统的升降旋转平台在曲线线路外轨超高的情况下,车身会倾斜,固定在其上的立柱平台随之也跟着倾斜,平台地板面距轨面最高达6.8m,外轨超高最大达200mm,等同于倾斜7.9°,作业人员的安全受到很大的威胁。在铁路曲线线路外轨超高125mm时作业,就需要平台能够自动调平。TY5CT型接触网作业车可在线路外轨超高200mm的范围内,通过“平台自动控制系统”自动实现作业平台的调平与复位;在动力源发生故障的情况下,可采用手动方式将平台调平或复位。操纵人员对作业工况心中有“数”,机械电子、软件多重安全保护,加强了作业的安全可靠性,提高了接触网作业车的使用性能和技术档次。
[1]北京铁路局,中铁宝工有限责任公司.TB/T2180—2006电气化铁道接触网综合检修作业车技术条件[S].北京:中国标准出版社,2006:6-21.
[2]单亚男,刘志奇,武宗才,等.接触网作业车自动控制作业平台的实现[J].液压与气动,2011(5):58-61.
猜你喜欢
云南画报(2021年10期)2021-11-24 01:06:38
中国民间疗法(2021年5期)2021-06-09 09:21:08
机械工程与自动化(2020年4期)2020-08-25 02:06:58
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
制造技术与机床(2019年12期)2020-01-06 03:17:46
西南交通大学学报(2018年5期)2018-11-08 10:58:26
森林工程(2018年4期)2018-08-04 03:23:38
上海铁道增刊(2017年3期)2018-01-22 03:01:24
航天工业管理(2017年4期)2017-05-12 01:16:35
西南交通大学学报(2016年3期)2016-06-15 20:29:35
