关于混合ARMA(1,1)过程的研究
2013-11-12 13:11杨明洁訾雪旻段美华
科技视界 2013年32期
杨明洁 訾雪旻 段美华
(天津职业技术师范大学 理学院,中国 天津 300222)
0 引言
时间序列是根据时间顺序得到的一系列观测值,它的典型特征是相邻观测值之间存在一定的依赖性。许多理论或实际生活中的数据就是以这种时间序列的形式呈现的。
1 一阶自回归——一阶移动平均模型ARMA(1,1)[1]
对于自相关过程,如果在t时刻的过程值zt,不仅与过程先前值有关,而且与先前时刻的随机扰动也存在一定的关系时,就应用自回归——移动平均混合模型来模拟自相关数据,混合模型为:

不失一般性,本文将应用一阶自回归——一阶移动平均过程,即混合ARMA(1,1)过程来描述自相关的观测值,并假设均值μ=0,模型为:

2 控制图的应用
应用EWMA、REWMA、T2和RT2四个控制图来监测混合 ARMA(1,1)模型,这些控制图在很多论文及相关书籍中都有介绍,在这里就不加以赘述。
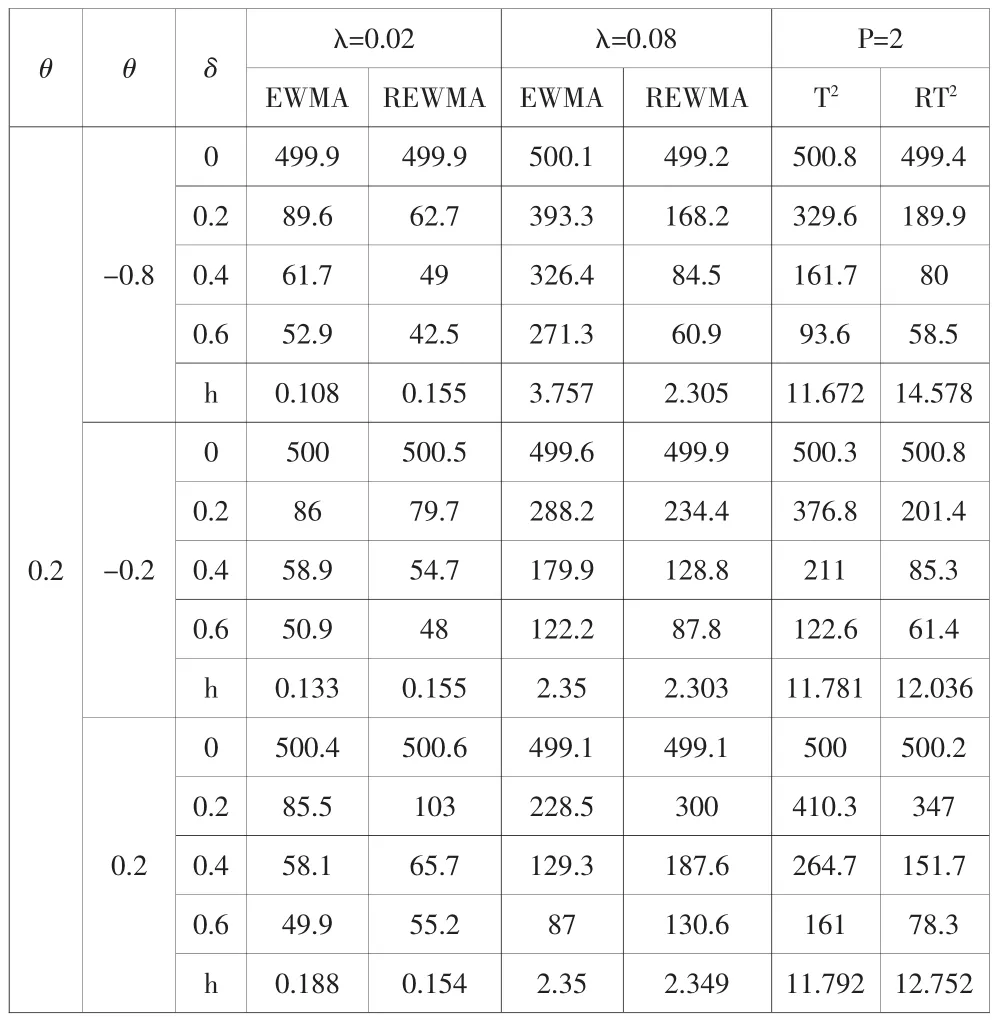
表1 EWMA、REWMA、T2和RT2控制图在θ=0.2时的ARL对比值
Apley和Tsung(2002)[2]详细给出了如何选择最优窗宽以及如何规定第一类错误概率α的方法,此处不再赘述。在本文中选择的最佳移动窗宽为p=2,第一类错误概率为α=0.002。λ为EWMA和REWMA的光滑系数。以0<θ<1为代表,下表表1、表2分别给出EWMA、REWMA、、T2和RT2控制图在 θ=0.2和θ=0.8时的ARL值。
结果显示,在 λ 极小(0.02)且 Ø=-0.2、δ=0.2 时,79.7<86.0<201.4<376.8(分别为 EWMA、REWMA、、T2和 RT2的 ARL 值),因此在此时最优的为REWMA控制图。同理,我们可以得到规律见表3。
当 λ 极大(0.8)且 Ø=-0.8、δ=0.2 时,173.2<191.8<350.1<421.5(分别为RT2、REWMA、T2和EWMA的 ARL值),因此在此时最优的为RT2控制图。同理,我们也可以得到规律见表3。
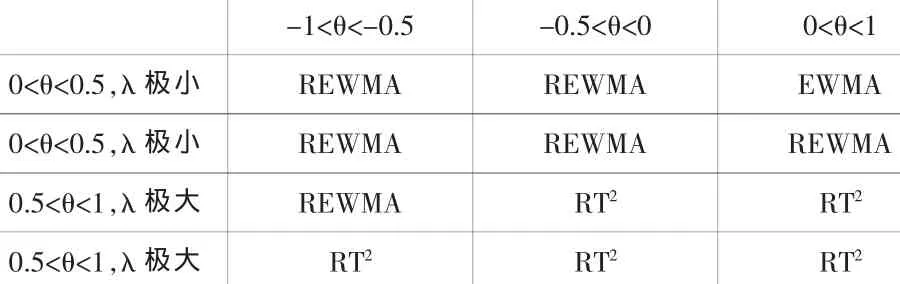
表3 当0<θ<1时,监测中小漂移的最优控制图的选择
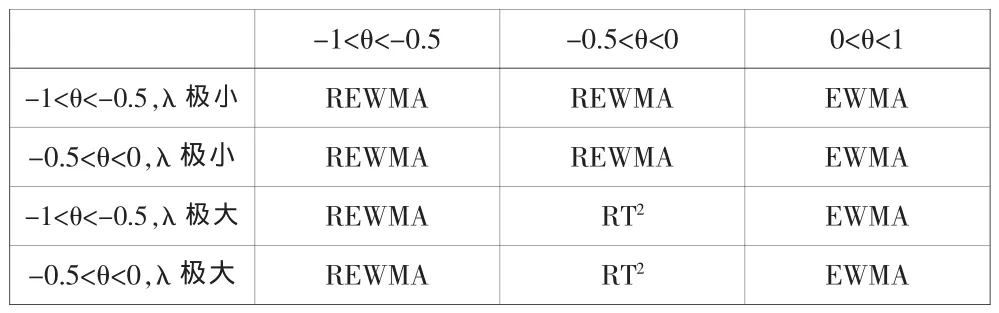
表4 当-1<θ<0时,监测中小漂移的最优控制图的选择
应用同样的方法,可以得到当-1<θ<0时的控制图的选择情况,见表4
3 结果分析
结果表明,对于混合 ARMA(1,1)模型来说,当 0<θ<1 时,从整体来看,残差控制图要比原控制图相对有优势,当光滑系数λ极小时,可以选择使用REWMA控制图;当λ极大时,可以考虑应用RT2控制图;当-1<θ<0 且-1<Ø<0 时,残差控制图要占主导,当-1<Ø<-0.5(不考虑λ的影响)和-0.5<Ø<0且λ极小时,可以考虑使用REWMA控制图;当-0.5<Ø<0 且 λ 极大时,应用 RT2控制图;当-1<θ<00<Ø<1 且时,应用EWMA控制图为最优。
[1]乔治 E.P.博克斯.时间序列分析[M].机械工业出版社,2002.
[2]王兆军,邹长亮,李忠华.统计质量控制图理论与方法[M].科学出版社,2013.
猜你喜欢
动漫界·幼教365(大班)(2023年3期)2023-05-02
动漫界·幼教365(中班)(2023年3期)2023-04-23
网络安全与数据管理(2022年3期)2022-05-23
数学年刊A辑(中文版)(2021年1期)2021-06-09
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
数学物理学报(2019年3期)2019-07-23
新教育(2018年8期)2018-08-29
数学物理学报(2018年3期)2018-07-17
通信电源技术(2016年4期)2016-04-04