
2 000 t起重船动力定位能力分析
2013-11-10 06:18董胜利
上海船舶运输科学研究所学报 2013年1期
董胜利, 赵 标
(上海船舶运输科学研究所 研发中心,上海200135)
0 引 言
动力定位系统最基本的功能是通过控制船舶上各个推力器的转速和方位角来实现可靠定位,满足船舶定位的需要。在系统设计阶段,需要通过定位能力分析来验证所安装的推力器能否完成所需的功能,因此定位能力分析十分重要,无论是生产厂家、使用者还是第三方机构如船级社等都非常关心这个问题。定位能力分析不仅可作为动力定位的评价标准,还能为设计提供依据。目前一些主要的动力定位生产和使用厂家都一致认可动力定位能力曲线(DP Capability Pl ots)是评价动力定位能力的有效工具。
有关的国际组织对定位能力曲线的计算都制定了相关的规范标准和指导方法,一些著名的动力定位生产公司如Kongsber g等都自己开发了一整套包括定位能力计算和动态模拟分析软件。我国目前正处在动力定位产品自主设计和研发阶段,结合上海船舶运输科学研究所自主研发的SRI-VC2110DP动力定位系统的项目实践,参照国际海事承包商协会(Inter national Marine Contractors Association,I MCA)建议的《动力定位能力曲线说明书》[1],设计开发了具有自主知识产权的动力定位能力分析软件,并以2 000 t起重船为研究对象,对该船进行了定位能力分析。
1 动力定位能力曲线
1.1 计算要求
动力定位能力曲线[2]是具有一系列封闭曲线的极坐标图,它通过极坐标上1条0°~360°的封闭包络曲线来表示船舶在指定推力系统参数及指定环境条件下的动力定位能力。定位能力曲线上任意点的半径坐标表示某一方向上船舶保持定位所能承受的最大环境条件,一般采用最大风速来衡量(也可采用流速),角度坐标表示该环境条件的方向(相对于船舶风吹来的方向)。环境条件包括风、浪、流,在设置环境条件时,把流速作为恒定值,而风速和波浪以相同概率逐渐增加。考虑到风、浪、流条件的复杂性,一般都假定环境载荷从同一方向作用。动力定位能力曲线考虑的是水平方向环境载荷与推力器所产生推力的静态平衡,满足式(1)所示条件。
式(1)中:Txi、Tyi和Mzi分别为推力器在水平3个方向上产生的力和力矩;N为推力器数目;Fwx、Fwy和Mwz为风力和力矩,Fwvx、Fwvy和Mwvz为波浪漂移力和力矩;Fcx、Fcy和Mcz为流力和力矩。
环境载荷计算中只考虑平均部分,未考虑动力影响,因此必须有足够的推力冗余以保证在实际应用中能抵抗外力作用。一般情况下选取20%作为推力冗余裕度,即计算中的最大推力为推力器实际最大推力的80%。
1.2 计算流程
定位能力曲线计算流程[3]见图1,风速从0开始循环计算,每次循环风速增加一小量(如1 kn或1 m/s),分别计算风、浪、流环境载荷,叠加得到总环境载荷并施加给推力模型,直到总的环境载荷达到推力模型所能产生的最大推力,此时的风速便是船体保持定位所能抵抗的最大风速。选择一定风向间隔进行计算,如风向角每次增加10°,对各个风向角都重复上述过程,直到得出0°~360°所有风向角的最大风速。最后便可根据各个角度上计算得到的最大风速绘制出1条风速包络曲线,即所谓的动力定位能力曲线。
由图1可知,每个工况(case)计算应该由以下参数来决定[4-5]:
(1)流速;
(2)风速和有义波高以及平均周期之间的关系;
(3)需要考虑的推力冗余度;
(4)需要考虑的额外静力和力矩(如由作业任务产生的力);
(5)推力系统参数(推力器布置,型式和尺寸);
(6)设定处于工作状态的推力器。
在进行定位能力分析计算之前,需要建立环境载荷作用和推力系统的数学模型。环境载荷数学模型主要包括风压系数、流压系数和平均波浪力系数等参数。推力系统数学模型需要对两方面建模,一方面是推力分配逻辑,另一方面是在各种因素影响下的推力器效率。
2 环境载荷计算
环境外载荷是推力系统设计的依据,同时船舶所能抵抗的外载荷大小又是衡量推力系统能力的主要参数。准确计算环境外载荷是能够设计出合理推力系统的基础,环境外载荷资料的准确与否直接关系到设计的好坏甚至成败。船舶在海上所遭遇的环境条件主要有风、波浪和海流。
2.1 风载荷模型
风载荷模型如下:

式(2)中:vw为相对风速;ρ为空气密度;θ为相对风向角;Ax、Ay分别为上层建筑正投影和侧投影面积;L为垂线间长;Cwx(θ)、Cwy(θ)和Cwz(θ)为风压系数。
2.2 流载荷模型
流载荷模型如下:

式(3)中:Vc为相对流速;ρ为水密度;θ为相对流向角;B为型宽,L为垂线间长;Ccx(θ)、Cwy(θ)和 Ccz(θ)为流压系数。
2.3 波浪漂移力模型
波浪漂移力是一种非线性力,它是二阶差频波浪力的低频部分。规则波简单计算波浪二阶力可以简单表示为

式(4)中:CfX,CfY,CfN为波浪漂移力系数;ζ为波幅;α为相对流向角。
3 2 000 t起重船特性参数
所研究的2 000 t起重船是振华重工(集团)股份有限公司为伊朗IOEC承建的全回转起重船。该船为无螺旋桨推进的非自航浅吃水起重船,作业水深为200 m,艏艉各配置1套1 500 k W的全回转Z型导管推力器与布置船中两舷的同功率推力器形成DP1自动定位功能,保证在一定海况下完成作业。
3.1 船舶特性参数
2 000 t起重船主要参数见表1。

表1 2 000 t起重船主要参数
3.2 推力系统参数
2 000 t起重船推力系统包括4个参数完全相同的全方位推力器,分别布置在艏艉和舯部左右两舷。推力器功率为 ,其性能参数为:D=2.3 m,T=220.377 1 k N,T=0 k N, T·=40 k N/s,1 500 k WMaxMin=0.209 rad/s。
3.2.1 推力器布置
由于该船设计时并未考虑动力定位功能,而是在船体已经设计好的情况下增加了动力定位功能,故造成4台方位推力器为非对称分布。以船舶旋转中心点为坐标原点建立如图2所示的水平坐标系,4个推力器的位置坐标为:(X1,Y1)=(54.96,2.85),(X2,Y2)=(10.21,16),(X3,Y3)=(4.21,-16),(X4,Y4)=(-35.79,-3)。
3.2.2 推力器方位角禁区
推力系统的水动力干扰是推力系统设计中需要考虑的基本问题。在船体底部工作的推力器与船体和附近推力器都会产生复杂的相互干扰。目前尚没有完善的理论方法来精确估算这些干扰,大多采用基于模型试验的半经验预测方法。研究主要根据J.Dang[6]等总结出的经验估算公式计算方位角禁区。2 000 t起重船推力器方位角禁区见表2。当推力器故障或推力器不使用时,推力系统模型中不再考虑与其相关的禁区角。

表2 推力器方位角禁区

图2 推力器布置坐标图
4 定位能力计算
4.1 动力定位工作极限条件
2 000 t起重船动力定位系统设计要求在表3所示的作业环境下,实现动力定位功能。
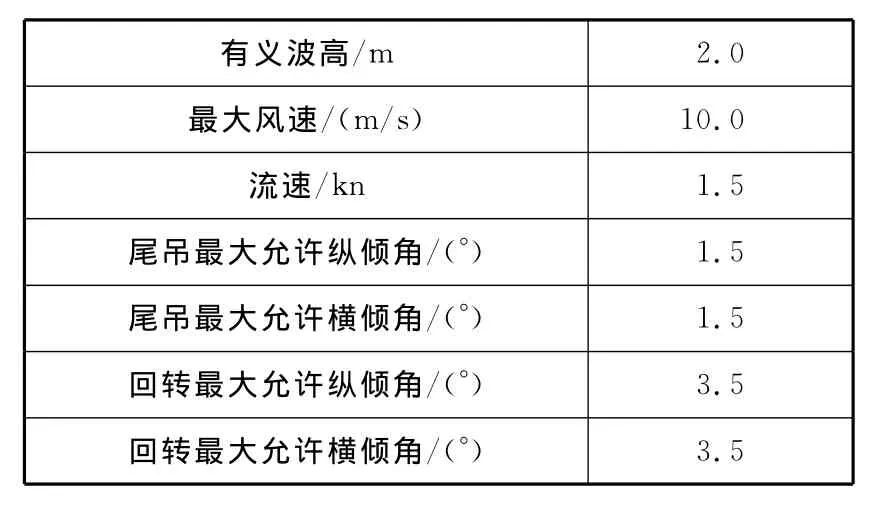
表3 动力定位工作极限条件
4.2 定位能力计算工况
定位能力曲线要考虑3种情况:所有推力器正常工作;其中1个推力器失效;其中2个推力器失效(最坏情况)。2 000 t起重船动力定位能力分析计算工况定义见表4。
4.3 定位能力曲线
图4~图9给出了以风向每10°为间隔算得的部分结果。通过读取图4~图9中包络曲线上各点的角度值和半径值,可获知船舶在该角度方向上所能抵抗的最大风速。表5列出了各种计算工况下最不利风向下的极限环境条件。
图4所示为全部推力器都完好时的定位能力曲线,由图4可知,2 000 t起重船大约能抵抗11.7 m/s的风速,满足设计所要求的动力定位极限工作条件;同时从图4中可以看出,该船在纵向具备相对较强的定位能力。图5~图8分别为各个推力器停止工作时的定位能力曲线。对比图4可以发现,单个推力器停工对定位能力有一定的削弱,特别在某些方向上会造成定位能力较大程度的降低。对比图5~图8可以看出,推力器4停工对动力定位能力影响最大,这是推力器不对称布置造成的。推力器1~3位于重心偏向艏部一侧,推力器4位于偏向艉部一侧,推力器4停工相当于艉部一侧推力器全部停工,必定对定位能力造成很大影响。图9是推力器3和推力器4停工,在这种工况下,船舶几乎丧失定位能力。

表4 计算工况定义

表5 最不利风向下极限环境条件
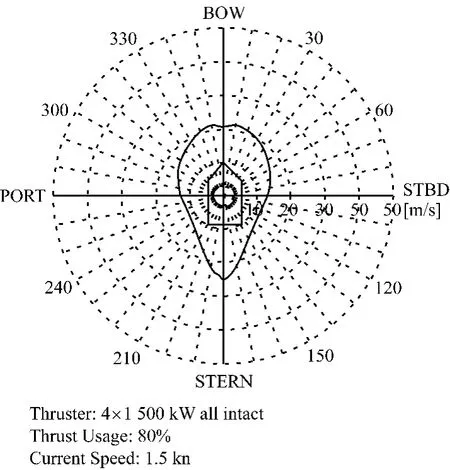
图4 动力定位能力曲线——推力器完整
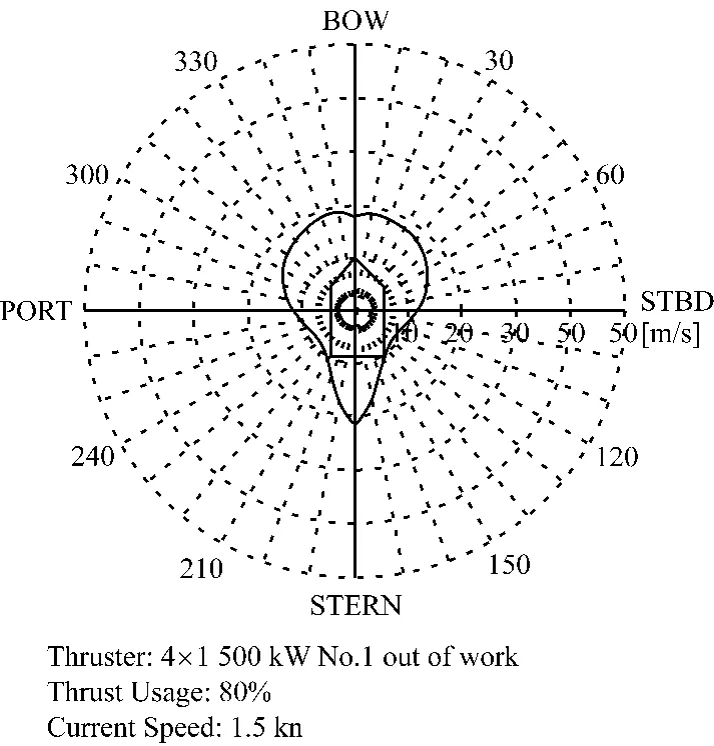
图5 动力定位能力曲线—No.1停工
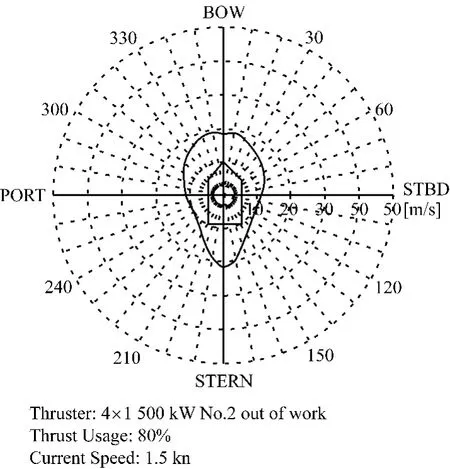
图6 动力定位能力曲线—No.2停工

图7 动力定位能力曲线—No.3停工
5 结 语
依据I MCA建议的相关规范标准,介绍了动力定位能力曲线的计算要求,阐述了动力定位能力曲线的计算方法和计算流程。结合上海船舶运输科学研究所SRI-VC2110DP动力定位系统研发的项目实践,以2 000 t起重船为研究对象,分析与计算了动力定位系统环境载荷,建立了动力定位系统定位能力分析模型,并采用C++语言编程开发了动力定位能力分析计算软件。针对2 000 t起重船推力系统的完整模式和各种失效模式,计算并绘制了动力定位能力曲线,并进行动力定位能力分析,为2 000 t起重船推进器的选择和布置提供有效的依据。

图8 动力定位能力曲线—No.4停工

图9 动力定位能力曲线—No.4停工
动力定位能力曲线是一种静态的定位能力分析方法,仅考虑了船舶推力系统理论上可能产生的推力与外环境载荷静态的平衡情况,计算简便快捷,适合于船舶初步设计阶段使用。在实际应用中,更加精确的定位能力分析需采用动态的时域运动模拟分析方法。相比动力定位能力曲线,动态模拟能够考虑到动态载荷,获得实时定位信息,能更加直观的评价定位能力。结合SRI-VC2110DP动力定位系统研发项目,自主设计开发动力定位动态模拟分析软件是下一阶段的工作目标。
[1] The Inter national Marine Contractors Association.Specification for DP capability plots[M]I MCA 140 Rev.1.2000.
[2] Björ n von Ubisch,Shipyard de Hoop.Station keeping criteria f or dynamically positioned vessels[C].//Marine Technology Society,Dynamic Positioning Conference.Houston,USA,September 28-30,2004.
[3] Ay man B.Mahfouz,Hussein W.El-Tahan.On t he use of t he capability polar plots progra m for dynamic positioning systems for marine vessels[J].Oceans Engineering,2006(33):1070-1089.
[4] Max J.Morgan.Dynamic positioning of offshore vessels[M].United States:Petroleu m Publishing Co.,Tulsa,OK.1978.
[5] 陈恒.深海半潜式平台动力定位推力系统设计研究[D].上海:上海交通大学,2008.
[6] J.Dang,H.Laheij.Hydr odynamic aspects of steerable thr usters[C].//Marine Technology Society,Dynamic Positioning Conference.Houston,USA,Septer ber 28-30,2004.
猜你喜欢
——吊物系统耦合运动响应的影响
珠江水运(2022年11期)2022-07-01
铁道建筑(2021年10期)2021-11-08
气象与环境科学(2021年4期)2021-08-27
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
中国电业与能源(2020年5期)2020-06-16
航海(2019年6期)2019-12-20
航天器工程(2019年1期)2019-03-06
风能(2016年11期)2016-03-04
船海工程(2015年4期)2016-01-05
