
压电陶瓷极化优化算法与装置
2013-11-09 05:48靳子洋陆永耕
上海电机学院学报 2013年5期
靳子洋, 张 彬, 陆永耕
(上海电机学院 电气学院, 上海 200240)
压电陶瓷极化优化算法与装置
靳子洋, 张 彬, 陆永耕
(上海电机学院 电气学院, 上海 200240)
根据压电陶瓷参数优化算法,设计了一种新型压电陶瓷极化优化装置。通过单片机检测极化过程电流变化,自动调节极化过程,实现了压电陶瓷参数一致性的控制。该装置具有性能参数控制好、操作方便、安全等特点,压电陶瓷参数一致性的成品率高。
压电陶瓷; 极化装置; 单片机; 电压发生器
在压电陶瓷的研制和生产中,经过配方设计、计算、配料、混合、预压、预烧(一次烧结)、粉碎、细化、造颗粒、成型、排型、烧成、烧后加工、上电极系列工艺过程后,要进行极化操作。由于压电材料只有经过极化后才具有压电性能,才能成为压电元件,故极化对于压电陶瓷的研制和生产的整个过程来说是一个极为重要的环节。极化工艺是压电陶瓷所特有的工艺[1-2]。
压电陶瓷与一般电子陶瓷的制作工艺相类似,但其也具有特殊性。压电陶瓷工艺中最为重要的是预烧、烧结和极化3个工序,其中,极化工艺是压电陶瓷材料获得压电性能的关键工序;极化的优劣很大程度上影响了压电陶瓷的压电特性及老化特性。要充分挖掘其压电性能,必须选定合适的极化电场、极化温度和极化时间。文献[3-5]中研究了压电陶瓷的极化测试方法;文献[6-7]中研究了各向异性压电陶瓷制作;文献[8-11]中则对PZT功率陶瓷的压电性能提高等进行了相关研究;文献[12-13]中对有关压电陶瓷常规电性能测试系统的研究也仅限于总体压电陶瓷材料性能参数的控制;它们均未涉及压电陶瓷极化过程优化控制与总体参数一致性的控制。因此,研制一个性能比较好、操作方便的极化装置对提高高压电陶瓷性能一致性具有实际应用价值。
本文设计了一种压电陶瓷极化优化装置。利用89S52单片机,采用脉宽调制技术(PWM)来控制极化槽温度,为压电陶瓷极化提供了可靠的恒温条件,通过在直流高压附加小的交流信号的方法,实现了在线压电陶瓷参数测量,可以提高压电陶瓷参数一致性的成品率[14-15]。
1 压电陶瓷参数控制原理
压电陶瓷模型参数的检测电路为压电陶瓷参数辨识算法提供了在线检测。参数在线检测算法原理如下: 在压电陶瓷回路串联一阻值小的检测电阻,用以检测外加激励信号作用下的压电陶瓷响应,作为反馈信号与所施加的激励信号进行相关处理。外加的小激励交流信号仅为正常工作高压的0.1%,所施加的激励信号和其检测过程通过二极管和电容将极化过程隔离,不影响极化过程。压电陶瓷模型参数的检测电路如图1示。其中,U极化为施加的直流高压,U测试用于测试小激励信号,U检测通过检测电阻Rc检测得到反馈电流。

图1 压电陶瓷模型参数的检测电路Fig.1 Detection circuit for PZT parameters
2 系统设计
2.1总体设计
本文采用北京革新仪器公司的8051单片机系统开发系统。该系统具有模数/数模转换功能;采用芯片AD0809/DAC0832,并行输入、输出信号驱动光电隔离8255A,键盘输入KEY及数码管显示LED 8279,设置有看门狗电路WDT,能满足本文应用要求。
采用单片机C语言编写用户程序,并在仿真器Explorer/G6E上编译、调试通过;ICExplorer仿真系统具有编辑、汇编、编译等集成调试功能。系统程序包括: 系统初始化Init_sys();主程序Main();键盘输入ReadKey()与显示DisPP();电流采样AD与PWM数字量输出控制;频率过零采样与时钟定时Timer0();看门狗WATCHDOG()等。
本文设计的压电陶瓷极化装置的相关内容包括: 温度与电流检测方法,输出控制温度脉宽调制技术等。采用DS18B20芯片检测极化槽温度。
利用变压器将220V交流信号转换为5kV的高压,经整流双路串联形成10kV可调的高压极化直流电源。
该装置基本参数如下: ① 温度自动控制范围为(0~100)℃±1℃;② 时间控制(根据检测到的参数)为0~30min;③ 直流高压输出为0~10kV。
极化系统结构图如图2所示。

图2 极化系统结构图Fig.2 Structure of PZT polarization
2.2温度控制
2.2.1 温度检测与控制 AT89S52是整个系统的CPU。温度测量由DSl8B20检测并直接转换成数字信号。单片机对该温度值与被控制值(设定温度值)进行比较,根据其偏差值的大小,采用比例-积分-微分控制算法计算出相应的控制输出量,然后通过I/O接口电路(本文采用PWM调功方式,相当于D/A转换器)控制双向可调硅在控制周期内的通断占空比(即控制电加热器平均功率的大小),再输出控制输出量,以控制加热器工作,进而达到对温度进行控制的目的。
为了简化输出通道的硬件结构,采用脉冲宽度调制的控制方法(PWM波控制)。脉冲宽度T1与周期T的比值为ρ(占空比)。温度控制过程中,随着实际温度与设定温度T0的差值减小,ρ也随之减小。温控过程中脉冲方波宽度与温差信号关系如图3所示。
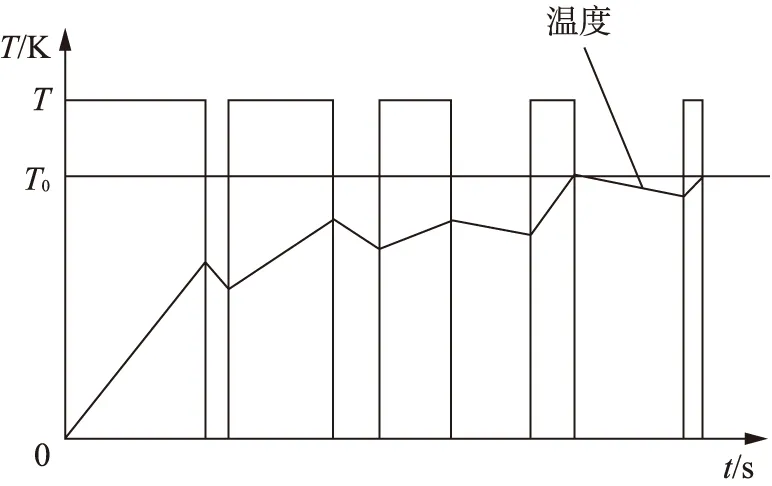
图3 PWM温度控制过程的占空比与温差随时间变化的关系图Fig.3 Variation of temperature error and duty cycle with time
2.2.2 PID控制算法 温度PID控制原理是先计算出实测温度与设定温度的偏差值,然后对偏差值进行PID处理,得到的控制输出信号用于控制加热,使温度控制在设定的范围内。本文采用增量式PID算法计算得到控制量Δu(k),其中,k为数字控制量的输出。
2.2.3 温度控制程序设计 PWM控制通过软件定时器实现。定时器以工频周期为基本计数周期进行加法定时。定时器设置工作方式为“0”,时基定为100ms。本文假定PWM波的周期为10s,将每个周期分成100份,即M=0~100,由PID算法计算得到一个0~100的整数形式的输出控制量Δu(k)。当一个周期开始时,M=0,P1.1脚输出高电平,加热器停止加热;之后,定时器每过100ms,M增加1,当M≤Δu(k)时,P1.1脚电平翻转输出低电平,此时加热器开始加热,直到M增加至100,重新开始下一个控制周期。下一周期开始时,P1.1脚电平又被置为高电平,如此反复,便产生温度控制的PWM波。
2.2.4 PID参数的整定 PID参数的设定决定了升温速度和系统稳定性。面对不同的控制对象,参数都不尽相同。本文根据参数在整个PID控制过程中的作用和实验现象,通过反复实验调试选定理想的参数值。对一定体积硅油(0.02m3)的压电陶瓷极化温度控制系统,被控对象的初始滞后时间为120s,通过实验测量,测得加热炉丝的温度相对时间的阶跃响应曲线为一阶惯性延迟。由阶跃响应曲线可以确定时间常数T=240s,比例放大系数K=0.5。
在得到控制对象的数学近似模型后,结合试验反复调试其控制参数,直至得到满意的输出控制曲线为止。本文实验得到的PID参数KI=4.5,TI=66.7,其动态及稳态特性均满足精度要求。
3 测试实验分析
将型号为φ45mm、φ60mm的厚度为 1mm 10个被测压电陶瓷片按照类型分为2组。将这2组各5片的压电陶瓷片在给定极化电压、要求参数的条件下,进行极化优化实验。极化过程如图4所示。结果表明,经过优化后的时间差异不大,但是实际检测得到的压电陶瓷片参数(电阻R、电感L、电容C)的一致性有了很大提高,特别是其中的电容极差由原来的10%缩小至5%;成对匹配由原来的40%提高至80%,可以满足匹配要求,有效提高了成品率和人工匹配效率。
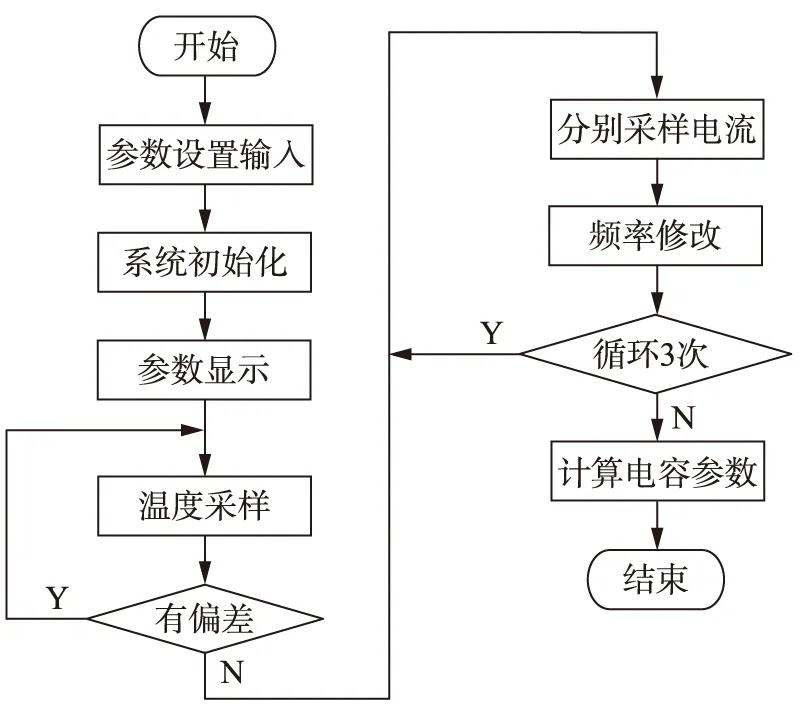
图4 极化过程流程图Fig.4 Flow chart of PZT polarization
为了简化操作,检测过程所施加的小幅值变频信号(约40kHz)无法由51单片机实现,本文采用人工操作方式,每30s调节信号频率1次,分别为(40±1) kHz,只是验证通过变频检测R、L、C参数的方法,单片机只是采样获取施加小信号的频率进行相关分析计算。优化极化后的参数测试如表1所示。

表1 极化后的测试参数
由表1可见,优化极化后的电容极差在10%内,与传统的极化操作相比,可有效提高压电陶瓷参数在匹配时的一致性。
4 结 语
本文设计了一个基于单片机的压电陶瓷极化参数控制装置,实现对极化槽内的温度测量、电加热控制、在线测量压电陶瓷参数等功能。该方法避免了压电陶瓷极化完成后,进行参数测量、匹配过程繁烦与匹配成功率低的问题,通过在直流高压附加小幅值变频信号的方法,实现了在线压电陶瓷参数测量,可以提高参数一致性的成品率,简化匹配过程。实验和计算机模拟表明,该方法简单、可靠和参数一致性好。
[1] 张福学.现代压电学: 中册[M].北京: 科学出版社,2002: 1-3.
[2] 张传忠.压电陶瓷的新应用及新工艺[J].压电与声光,2000,22(2): 90-94.
[3] 江向平,廖 军,魏晓勇,等.中温烧结PZN-PZT系陶瓷的压电性能研究[J].无机材料学报,2000,15(2): 281-286.
[4] 董显林,孙大志,王永令.各向异性压电陶瓷研究的新进展[J].压电与声光,1994,16(4): 28-32,35.
[5] 杜克相,潘中印,段亚玲.压电陶瓷的极化原理和测试方法[J].压电与声光,2010,24(4): 32-33,36.
[6] 陈亚波,张洋洋,邵 坤,等.基于数字正交的压电材料参数测试系统研究[J].压电与声光,2011,33(5): 804-806.
[7] 赵寿根,程 伟.压电陶瓷材料电学性能参数测量研究[J].压电与声光,2005,27(2): 200-202.
[8] Arnold F J.Resonance frequencies of the multilayered piezotransducers.A[J].The Journal of the Acoustical Society of America,2008,123(5): 4209-4214.
[9] Liu Yingxiang,Liu Junkao,Chen Weishan,et al.A rotary ultrasonic motor using radial bending mode of ring with nested PZT excitation[J].Journal of Zhejiang University,Science A,2012,13(3): 189-196.
[10] Liu Xiaoxiang,Hu Jun.On the placement of actuators and sensors for flexible structures with closely spaced modes[J].Science China: Technological Sciences,2010,53(7): 1973-1982.
[11] Mohammad Z,Shiry G S,Mehdi R S,et al.Precision control of a piezo-actuated micro telemanipulation system[J].International Journal of Precision Engineering and Manufacturing,2010,11(1): 55-65.
[12] 张 晖.压电陶瓷常规电性能自动测试系统研究[J].电子元件与材料,2004,23(9): 49-51.
[13] 倪厚强,高龙琴.陶瓷谐振器特性参数测试方法研究[J].电子工程师,2008,34(1): 16-18.
[14] 张毅刚.单片机原理及应用[M].北京: 电子工业出版社,2010: 357.
[15] 徐爱钧,彭秀华.单片机高级语言C51应用程序设计[M].北京: 电子工业出版社,2000: 172.
Optimal Algorithm and Device for Piezoelectric Polarization
JINZiyang,ZHANGBin,LUYonggeng
(School of Electric Enginerring, Shanghai Dianji University, Shanghai 200240, China)
According to the algorithm of parameter optimization for piezoelectric ceramic, a new device for optimizing the piezoelectric ceramics polarization is designed. By detecting the polarization current and automatically adjusting the polarization process, the control parameters of piezoelectric ceramic consistency are obtained. The device has good performance in terms of parameter control, operation safety, piezoelectric ceramic parameter consistency, and high rate of finished products.
piezoelectric ceramic; polarization device; microprocessor; voltage generator
2095-0020(2013)05 -0258-04
TM 282.06
A
2013-10-06
上海市教育委员会科研创新基金重点项目资助(13ZZ144)
靳子洋(1989-),男,硕士生,主要研究方向为风力发电技术、压电陶瓷控制与应用,
E-mail: 496691356@qq.com
指导教师: 陆永耕(1963-),男,教授,博士,主要研究方向为工业自动化、超声电机控制及数字图像处理,
E-mail: luyg@sdju.edu.cn
猜你喜欢
公民与法治(2022年5期)2022-07-29
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
教学考试(高考物理)(2021年5期)2021-11-08
中医眼耳鼻喉杂志(2021年1期)2021-07-22
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
燕山大学学报(2015年4期)2015-12-25
电源技术(2015年1期)2015-08-22
振动、测试与诊断(2014年6期)2014-03-01
