
基于微分器的VTOL飞行器参数差分进化辨识
2013-11-06 02:53袁瑞侠刘金琨
飞行力学 2013年5期
袁瑞侠, 刘金琨
(北京航空航天大学 自动化科学与电气工程学院, 北京 100191)
基于微分器的VTOL飞行器参数差分进化辨识
袁瑞侠, 刘金琨
(北京航空航天大学 自动化科学与电气工程学院, 北京 100191)
基于积分微分器和差分进化算法,给出了一种多输入多输出VTOL飞行器系统的质量特性参数和耦合系数的辨识方法。首先,在仅知道VTOL飞行器位置信号的测量输出情况下,利用高阶积分链式微分器估计其速度和加速度信息,然后对系统进行坐标变换,采用差分进化算法对参数进行辨识。仿真结果表明,在测量输出无噪声和有噪声情况下,该算法都可以准确地辨识系统参数。
VTOL飞行器; 微分器; 差分进化; 参数辨识
0 引言
垂直起降(Vertical Take-off and Landing, VTOL)飞行器可突破跑道的限制自由起降,在未来战争中具有重要的军事价值,因此,VTOL飞行器控制研究受到了国内外学者的广泛关注[1-2]。在飞行器控制领域,飞行器系统的气动参数和系统辨识问题受到普遍的重视。VTOL飞行器是强非线性、状态耦合和参数耦合的多输入多输出系统,其参数辨识问题具有很大的挑战性。
在传感器失效或者无传感器的情况下,微分器为信号跟踪和滤波提供了良好的方法[3-6],且微分器在系统辨识中也得到了成功的应用[7-9]。为了提高对噪声的鲁棒性,微分器通常通过积分提取微分信号。文献[3]提出的积分链式微分器,扰动仅仅存在于最后一个微分方程中,并且通过每一层的积分作用,扰动能够被充分抑制。相对于通常的高增益微分器,积分链式微分器可以有效地抑制噪声,而且可以直接估计系统高阶导数,避免了多个微分器的串联,形式简单且稳定性好。
差分进化 (Differential Evolution, DE) 算法是1995年由R Storn等[10]提出的一种基于群体智能理论的优化算法。DE与遗传算法思想类似,但其采用实数编码、更简单的变异操作和一对一的生存竞争策略。这既保存了遗传算法的优点,又避免了遗传算法的复杂运算。DE算法的卓越性能使其在解决复杂、非线性、不可求导和多目标函数最优解问题中日益受到重视。参数辨识问题即寻求一组模型参数最佳地拟合测量输入和输出数据,根据这一原理,一些学者已成功将DE算法用于系统辨识[11-12]。
本文首先针对VTOL飞行器三个子系统分别设计了高阶积分链式微分器,估计出VTOL系统中的未知状态;然后对模型进行坐标变换,利用DE算法辨识系统中的未知参数;最后在测量输出无噪声和有噪声干扰的情况下,进行仿真试验并给出结论。
1 系统描述
图1为Oxy平面上的VTOL飞行器受力图。由于只研究起飞过程,因此仅考虑垂直方向y轴和横向x轴,忽略了前后运动(即z方向)。Oxy为惯性坐标系,Oxbyb为飞行器的机体坐标系。
“我今儿没有好茶饭,只有山歌敬亲人……”一听到这熟悉的旋律,就让人想起1961年版的电影《刘三姐》。现在虽说已是七十多岁的老人,“刘三姐”黄婉秋的皮肤依旧白皙而有弹性,气色还特别好,她是怎么保养的呢?这其中有何秘诀?
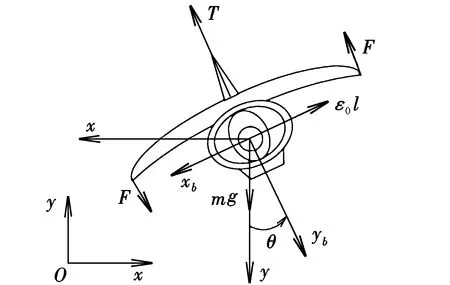
图1 VTOL飞行器受力示意图Fig.1 VTOL aircafrat under stress
利用机理分析法建立VTOL飞行器动力学平衡方程为[1]:
(1)

由式(1)可见,该模型为强非线性参数耦合系统,模型中包括三个物理参数需要辨识,即m,ε0和Ix。
令a1=1/m,a2=ε0/m,a3=1/Ix,T=u1,l=u2,x=X,y=Y,整理式(1)可得:
(2)
看了上面两点:家长不要打扰、不要帮助,那么是不是就在旁边袖手旁观、无所事事呢?当然不是,小朋友即便对什么有兴趣,可能也没多长时间的耐心,顶多两三分钟。毕竟宝宝的探索能力是有限的,如果他已经“研究”不出来了,很快就会失去兴趣,就会分心。这个时候,就是家长大显身手的时候了。孩子不感兴趣是因为他玩不出花样,如果大人能够变着法子玩新鲜,就能帮助孩子提高专注力、增强探索的持续时间。
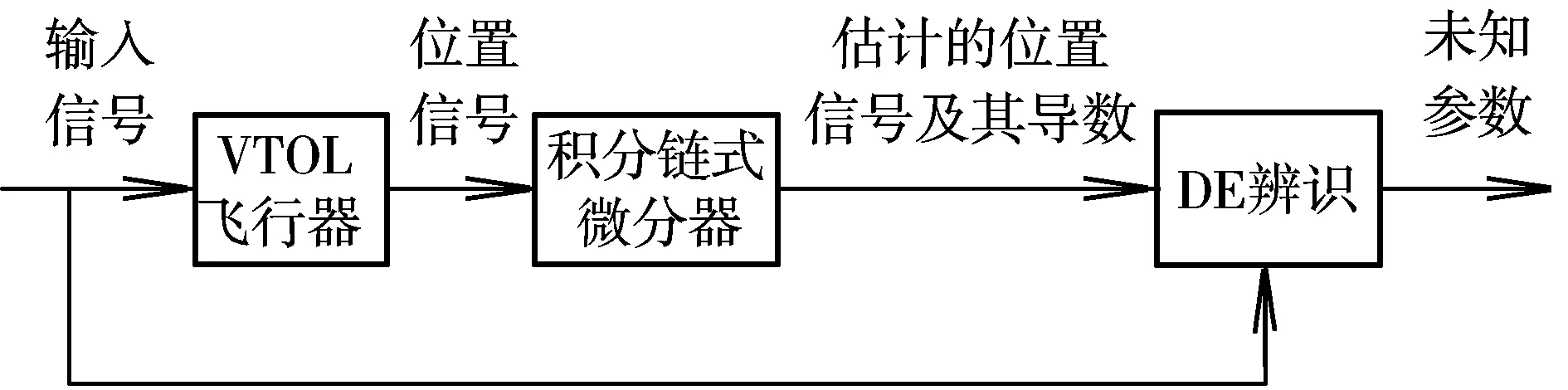
图2 参数辨识示意图Fig.2 Parameter identification sketch
2 跟踪微分器设计
定理1[3]:针对如下系统:
(3)
式中,T和l为控制输入,即飞行器底部推力和滚动力矩;g为重力加速度;ε0为描述T和l之间耦合关系的系数。
定理 2.4 度量空间([0,1], ρG)中的Cauchy-列收敛,即([0,1], ρG)是完备度量空间。
利用MCNP程序,计算了不同黑体温度的X射线照射圆柱腔体时的电子发射参数,包括光电产额、出射电子角分布和出射电子能谱,可以为SGEMP的计算提供较为准确的电子发射信息。
(4)
对于式(4)表示的微分器,当选取参数ε充分小时,微分器对于信号各阶导数的跟踪误差也充分小。即
(5)

在实际工程中,往往只有飞行器位置和滚转角测量输出x,y和θ,而参数辨识往往用到VTOL飞行器的速度信息和加速度信息。本文采用微分器来估计速度和加速度信息,然后利用DE算法进行参数辨识,具体流程如图2所示。
(6)

对式(4)进行拉氏变换,整理可得:
利用各类发酵菌种以虾壳为碳源、氮源来生产各类蛋白质和甲壳素取得了一系列成果[23-25],但是发酵法生产虾壳蛋白、甲壳素等还存在一定的问题,利用细菌发酵过程中会产生影响目的产物稳定性、浓度的代谢产物,且代谢产物一般难以分离、纯化,发酵周期过长,生产成本较高。
(7)
(3)变异运算。对当前种群的最好个体进行变异运算,具体算法如下:
利用上述定理,针对VTOL飞行器三个子系统,设计三个微分器:
(8)

本刊研究与试验报告的印刷版一般为3~4页,约5000~6000字;综述与评论的印刷版一般为4~8页,不超过8000字。
3 差分进化参数辨识
辨识的目标是找到一组参数,使模型在每个时刻最佳地拟合系统的输入输出数据。因此,参数辨识可以视为多目标函数最优解问题。但是这个目标函数可能具有局部极值和复杂的非线性结构,而DE是一种启发式搜索算法,可以很好地解决这些难题。
为了便于参数辨识,把式(2)变换后改写为:
(9)


令
2) 为了确保阀门能正常开关调节,DCS操作画面上应能准确反应阀门的开关动作状态,确保操作人员能及时准确地在DCS监控画面上发现阀门开度情况,及时联系维护人员处理[5]。
将y视为DE算法中的测量输出,u视为DE测量输入;参数a1,a2,a3为待估参数。即:
语法即语言的法则。扎实的基础语法知识对于学生准确理解文章中的长难句以及做好主观卷中的语法填空、改错题尤其是写作是极其重要的。对于语法复习,我们将采用“思维导图+重难点、考点突破+专项练习+阅读分析+写作运用”的复习方法对语法进行系统、全面的复习。要求学生通过思维导图系统了解各个语法项目,掌握、落实和运用语法重点。教师帮助学生突破重难点、解决学生问题。教师分工收集和改编各个语法重点在近几年高考题中的考查。试题讲评过程中选择性的让学生分析长难句。同时教师在复习过程中要加强锻炼学生将语法知识在英语写作中的正确、灵活使用,为英语写作增色、提分。
采用DE算法进行参数辨识的步骤总结如下:
(1)确定参数的可行域及种群初始化。在参数的可行域里随机地对种群进行初始化,算法如下:

(10)
且
(2)评价个体的适应度,并确定最好个体xbestj。适应度最好的个体就是使目标函数最优的个体。目标函数作为系统的输出响应和模型输出响应拟合程度的性能指标,可以简单地表示为:
(11)

式中,sn+1+an+1sn+…+a2s+a1=0是Hurwitz的。如果合适地选取a1,…,an+1,相当于多个一阶惯性环节或者二阶振荡环节的串连,可以获得良好的滤波效果。
hij(t+1)=xbestj(t)+F[xp1j(t)-xp2j(t)]
(12)
式中,xp1j(t)-xp2j(t)为差分向量,p1和p2表示个体在种群中序列号的随机整数;F为缩放因子。变异运算借鉴了当前种群中最好个体xbestj的信息,可以加快算法收敛速度。
在营利性养老服务机构里,入住老年人不仅需要日常生活照顾、疾病诊治、身体康复训练,还需要健康咨询、心理安慰、营养指导、临终关怀等,因此需要有大量的专业人才来提供专业服务。但是目前广西此类人才相当缺乏,具有养老护理职业资格证书的服务人员更少。目前广西养老机构服务人员多数为40岁以上妇女,她们的文化程度普遍较低,没有受过正规的专业护理培训,提供的服务基本属于简单的日常照料和护理。
(4)交叉运算。交叉运算可以保证DE种群的多样性。对当前种群中的每个个体进行交叉运算,具体算法如下:
(13)
式中,randlij∈[0,1]的随机小数;CR∈[0,1]为交叉因子。CR越大,则hij(t+1)的贡献越多,有利于局部搜索和加速收敛速率,但算法易于早熟收敛;CR越小,则xij(t)的贡献越多,有利于保持种群的多样性和全局搜索,但算法的收敛速度变慢。
(5)选择运算。DE采用“贪婪”搜索策略,经变异和交叉运算生成的试验向量vi与个体向量xi进行竞争,当xi的适应度比vi更优时被选作子代;否则,直接将vi作为子代。具体算法如下:
(14)
(6)更新xbestj(t)。确定当前种群中最好个体,并将计算其目标函数值与最佳个体xbestj(t)的目标函数值相比较。如果其目标函数之值优于xbestj(t)的目标函数之值,则更新xbestj(t);否则,仍保留
xbestj(t)。
习近平总书记在十九大报告中指出“把各方面优秀人才集聚到伟大奋斗中来意义重大。综合国力的竞争,说到底是人才竞争,谁能培养和吸引更多优秀人才,谁就能在日趋激烈的国际竞争中抢得先机”。纵观实际,当前,江、浙、沪地区,经济总量大,电力装机大,发电企业数量较多,对电力人才需求一直比较强烈。与民营企业相比,国企在选人用人和薪酬分配机制上不灵活,与市场劳动力价值接轨程度不高,在人才竞争中一直处于劣势。特别是近几年,浙江优化结构、转型升级较快,各行业收入水平增涨幅度较大,民营企业高薪抢人,对国企人员队伍稳定造成很大影响。
(7)如果符合终止准则,则输出xbestj(t)、估计目标值和期望目标值;否则回到步骤(3)。
4 仿真试验与分析
以权责发生制政府会计核算为基础的政府财务报告制度,是通过推进政府会计改革,建立全面反映政府资产负债、收入费用、运行成本、现金流量等财务信息的政府综合财务报告制度。科学、全面、准确反映了政府资产负债和成本费用,有利于强化政府资产管理、降低行政成本、提升运行效率、有效防范财政风险,适应建立现代财政制度、促进财政长期可持续发展和推进国家治理现代化的要求。
记噪信比为η,即噪声v是幅值为ηyi的高斯白噪声。设定采样时间为0.01 s,分别在无噪声和噪信比η=0.01情况下进行时长为100 s的仿真。参数辨识结果如表1所示。在无噪声和有噪声(η=0.01)的情况下,微分器都能很好地跟踪测量输出。图3和图4分别表示无噪声和有噪声(η=0.01)时,最佳个体的目标函数的收敛过程。采用最小二乘法(Least Sqare Method,LS)进行了仿真试验,结果如表1所示,参数收敛过程如图5和图6所示。
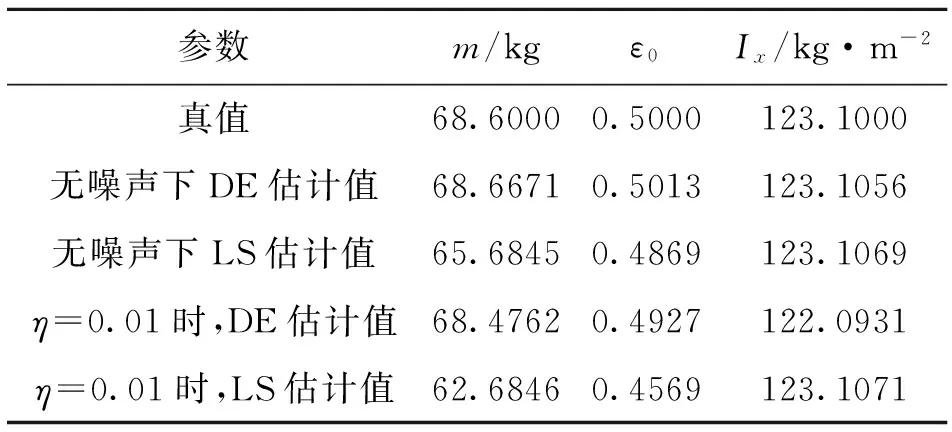
表1 VTOL飞行器参数辨识结果Table 1 Results for VTOL aircraft parameter identification
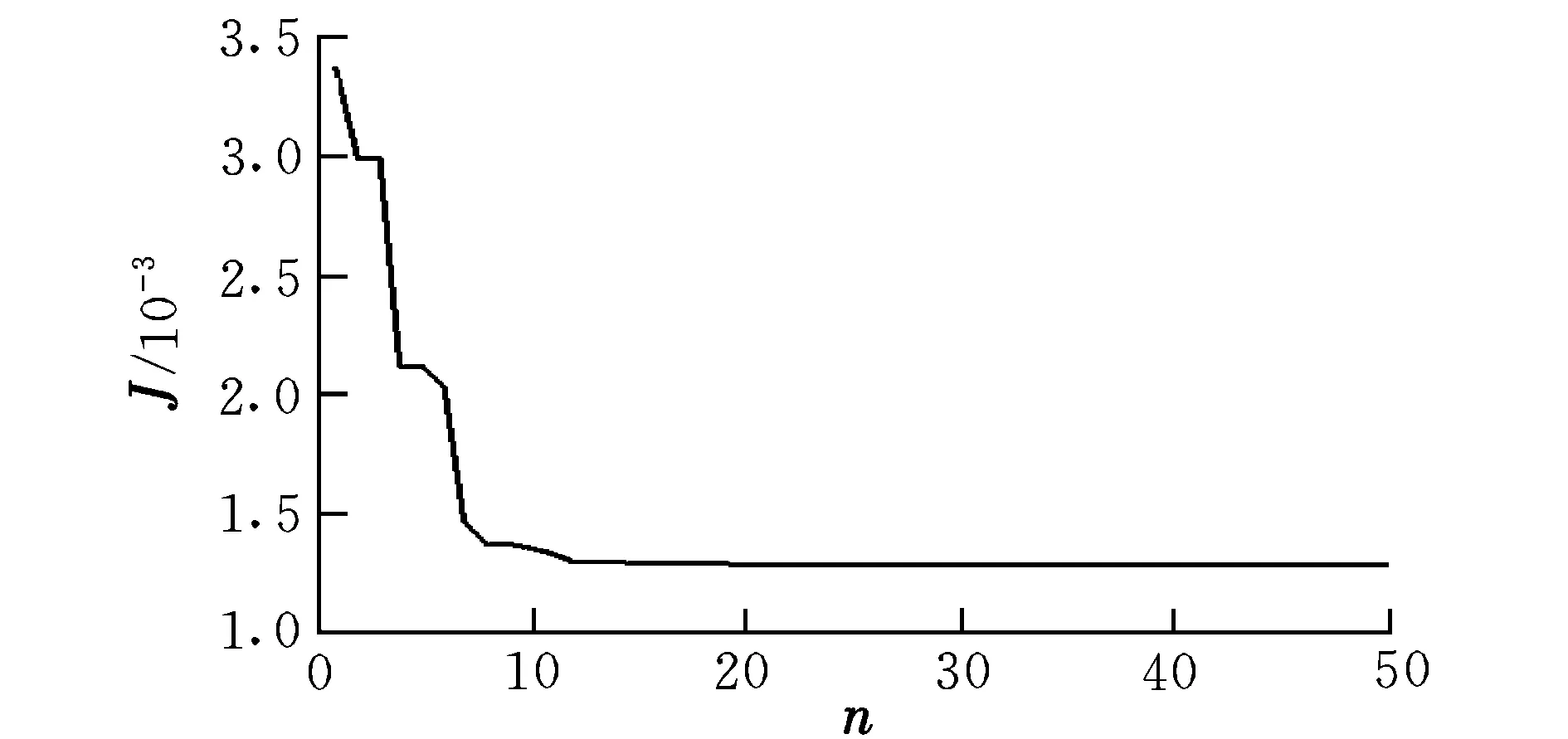
图3 无噪声时采用DE算法目标函数J的收敛过程Fig.3 Convergence characteristics of the objective function J using DE algorithm under noise free condition
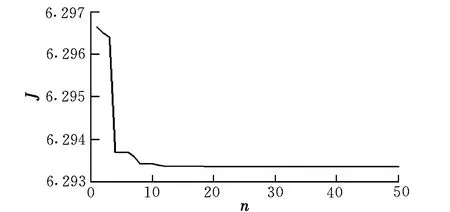
图4 η=0.01时采用DE算法目标函数J的收敛过程Fig.4 Convergence characteristics of the objective function J using DE algorithm when η=0.01

图5 无噪声时采用LS算法辨识的参数收敛过程Fig.5 Convergence characteristics of parameter identification results using LS algorithm under noise free condition
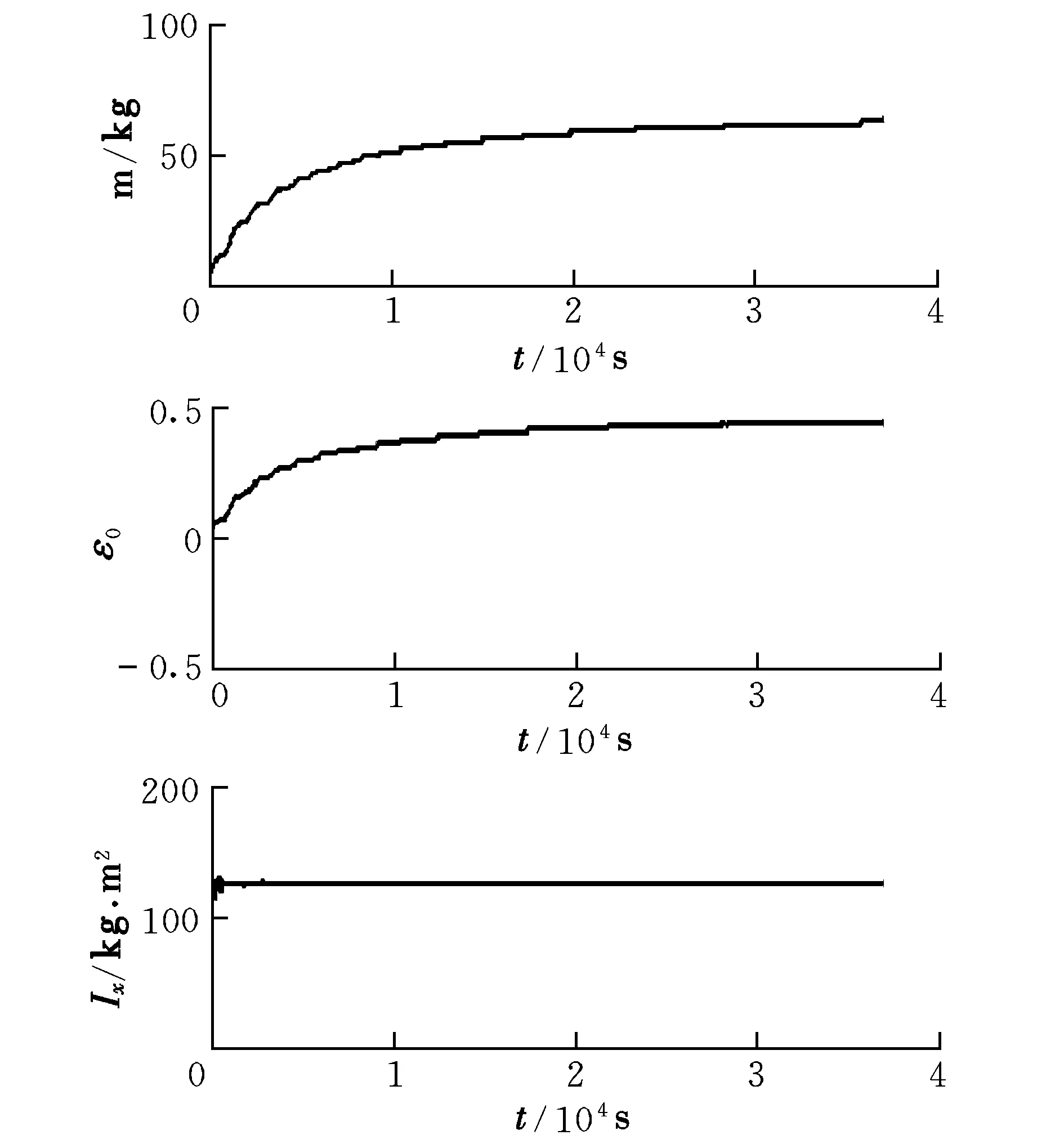
图6 η=0.01时采用LS算法辨识的参数收敛过程Fig.6 Convergence characteristics of parameter identification results using LS algorithm when η=0.01
通过以上分析可以发现,无论是在无噪声时和有噪声时,DE算法参数辨识的准确度明显优于LS算法。高阶积分链式微分器可以精确地跟踪VTOL飞行器的测量输出。精确的辨识结果也表明,在工程上这种微分器对信号的一阶和二阶导数也可以实现良好的跟踪。
5 结束语
仅基于位置信号,成功地将DE算法用于VTOL飞行器参数辨识。理论分析和仿真结果都表明,高阶积分链式微分器可以准确跟踪VTOL飞行器的测量输出,并估计其导数,且对噪声具有一定的鲁棒性。基于微分器的输出信号,DE算法正确地辨识出了未知参数。另外,该方法不仅局限于VTOL飞行器的参数辨识,对于结构参数是线性的系统,均可较准确地进行参数估计。
[1] Hauser J,Sastry S,Meyer G.Nonlinear control design for slightly non-minimum phase systems:application to V/STOL aircraft [J].Automatic,1992,28(4):665-679.
[2] Saber R O.Normal forms for underactuated mechanical systems with symmetry [J].IEEE Transactions on Automatic Control,2002,47(2):305-308.
[3] Wang X,Chen Z,Yuan Z.Design and analysis for new discrete tracking-differentiators [J].Applied Mathematic Transactions for Universities,Series B,2003,18(2):214-222.
[4] Levant A.High-order sliding modes,differentiation and output-feedback control [J].International Journal of Control,2003,76(9):924-941.
[5] Wang X,Chen Z,Yang G.Finite-time-convergent differentiator based on singular perturbation technique [J].IEEE Transactions on Automatic Control,2007,52(9):1731-1737.
[6] Su Y X,Zheng C H,Mueller P C.A simple improved velocity estimation for low-speed regions based on position measurements only [J].IEEE Transactions on Control Systems Technology,2006,14 (5):937-942.
[7] 黄远灿,韩京清.扩张状态观测器用于连续系统辨识[J].控制与决策,1998,13(4):381-384.
[8] 张文革,韩京清.跟踪-微分器用于连续系统辨识[J].控制与决策,1999,14 (A11):557-560.
[9] 王新华,刘金琨.微分器设计与应用-信号滤波与求导[M].北京:电子工业出版社,2010:158-160.
[10] Storn R,Price K.Differential evolution a simple and efficient heuristic for global optimisation over continuous spaces[J].Journal of Global Optimization,1997,11(4):341-359.
[11] Ursem R,Vadstrup P.Parameter identification of induction motors using differential evolution [C]//Proceedings of the 2003 Congress on Evolutionary Computation.Canberra,2003:790-796.
[12] Tang Hesheng,Xue Songtao,Fan Cunxin. Differential evolution strategy for structural system identification [J].Computers and Structures,2008,86(21):2004-2012.
DifferentialevolutionparameteridentificationofVTOLaircraft
basedondifferentiator
YUAN Rui-xia, LIU Jin-kun
(School of Automation Science and Electrical Engineering, BUAA, Beijing 100191, China)
Based on integral chained differentiator and differential evolution (DE) algorithm, this paper develops a novel parameter identification method for qualitative characteristic parameters and coupling coefficient of a multiple-input multiple-output VTOL aircraft system. High-order integral chained differentiators are designed to estimate velocity and acceleration information of VTOL aircraft system. After coordinates transform, differential evolution algorithm is utilized to identify the parameters from the input-output data. Simulation results show this method could correctly identify the system parameters no matter whether the output has noise or not.
VTOL aircraft; differentiator; differential evolution; parameter identification
V249.1
A
1002-0853(2013)05-0411-05
2013-01-10;
2013-04-19; < class="emphasis_bold">网络出版时间
时间:2013-08-21 18:48
国家自然科学基金资助(61374048);高等学校博士学科点专项科研基金资助(20121102110008)
袁瑞侠(1990-),女,河南周口人,硕士研究生,研究方向为系统辨识和滑模控制;刘金琨(1965-),男,辽宁大连人,教授,博士生导师,研究方向为系统辨识、智能控制和滑模控制。
(编辑:李怡)
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
数学物理学报(2021年2期)2021-06-09
数学年刊A辑(中文版)(2020年3期)2020-10-27
数学物理学报(2019年5期)2019-11-29
电子制作(2018年2期)2018-04-18
中学生数理化·八年级物理人教版(2017年9期)2017-12-20
广东技术师范大学学报(2016年5期)2016-08-22
小朋友·快乐手工(2015年5期)2015-06-06
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
噪声与振动控制(2015年4期)2015-01-01
