整车模型被动悬架的建模与仿真分析
2013-10-26 05:48:58张海涛
井冈山大学学报(自然科学版) 2013年3期
张海涛,高 洪
整车模型被动悬架的建模与仿真分析
*张海涛1,高 洪2
(1.安徽机电职业技术学院汽车工程系,安徽,芜湖 241000; 2 安徽工程大学机械与汽车工程学院,安徽,芜湖 241000)
基于系统动力学理论建立了含被动悬架的整车动力学模型。在MATLAB/Simulink中,集成以白噪声——积分器产生的地面输入,前、后、左、右悬架非簧载质量模型和整车运动模型最终实现被动悬架特性仿真的软件建模。通过对仿真实验结果的分析,验证了被动悬架的整车动力学模型和相应的仿真模型的可行性,为悬架参数设计和优化提供了技术基础。
被动悬架,整车动力学模型,特性仿真
0 引言
悬架将车体与车轴弹性连接,把路面作用于车轮上的垂直反力、纵向反力、侧向反力以及这些力所造成的力矩都传递到车架(或承载式车身)上,并兼有缓和冲击衰减振动的功能,其设计参数对汽车的轮胎动载荷、悬架的动挠度和车身加速度等影响很大[1-3]。
通常在悬架研究中多采用1/4车体模型和半车模型,无法同时考虑俯仰角和侧倾角对行驶平顺性的影响[1]。本文通过建立含被动悬架的整车动力学模型,考虑汽车在不平路面激励作用、加速、制动等常见工况下,悬架设计参数对汽车的行驶平顺性及操纵稳定性的影响,为优化其设计参数提供依据,也为主动悬架的设计提供必要的理论基础[4]。
1 被动悬架的整车动力学模型
含被动悬架的整车动力学模型如图1所示。其中ms—整车车体质量,JΦ—俯仰转动惯量,xc—车体质心位移,Jθ—侧倾转动惯量,Φ—俯仰角度,θ—侧倾角度,L—前后轴之间的距离,b—前轴到质心的距离,B—汽车两轮之间的距离,a—汽车轮胎到质心的距离,ks1—前左悬架弹簧刚度系数,cs1—前左悬架减震器的阻尼系数,xt1—前左悬架非簧载质量的位移,xr1—前左轮胎地面的扰动输入位移,kt1—前左车轮轮胎刚度系数,ks2—前右悬架弹簧刚度系数,cs2—前右悬架减振器的阻尼系数,xt2—前右悬架非簧载质量的位移,xr2—前右轮胎地面的扰动输入位移, kt2—前右车轮轮胎刚度系数,ks3—后左悬架弹簧刚度系数,cs3—后左悬架减振器的阻尼系数,xt3—后左悬架非簧载质量的位移,xr3—后左轮胎地面的扰动输入位移,kt3—后左车轮轮胎刚度系数,ks4—后右悬架弹簧刚度系数,cs4—后右悬架减振器的阻尼系数,xt4—后右悬架非簧载质量的位移,xr4—后右轮胎地面的扰动输入位移, kt4——后右车轮轮胎刚度系数。
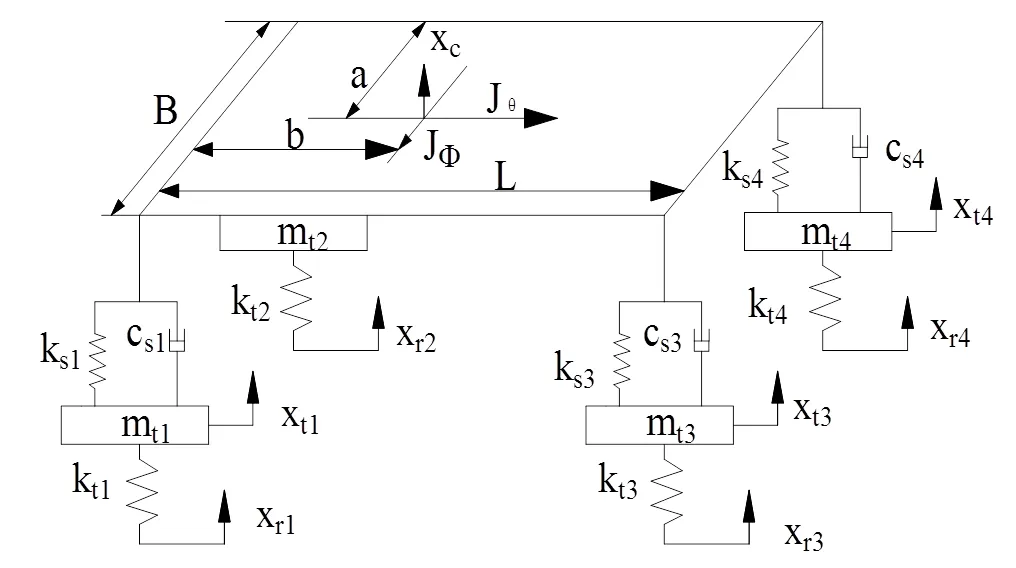
图1 整车模型被动悬架系统
Fig .1 Entire vehicle model of passive suspension
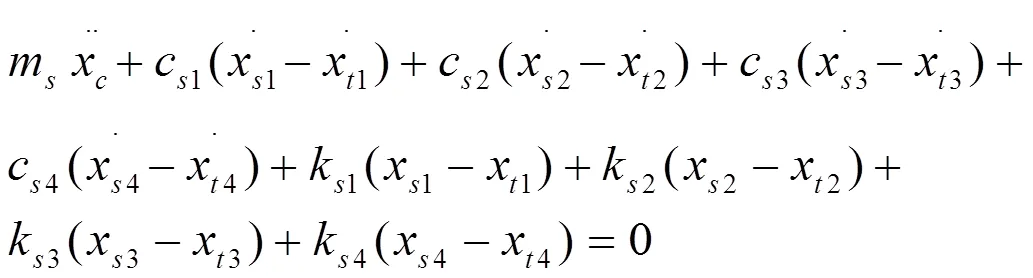
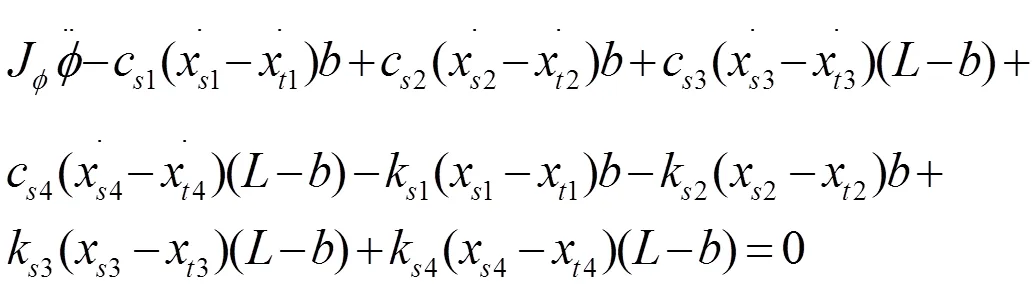
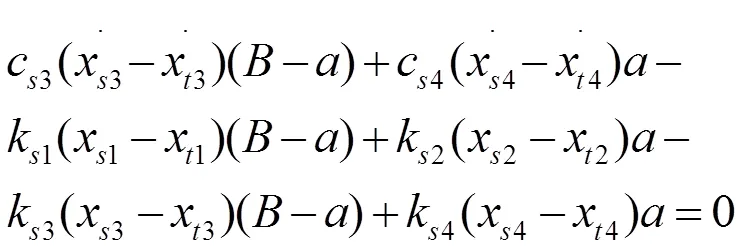
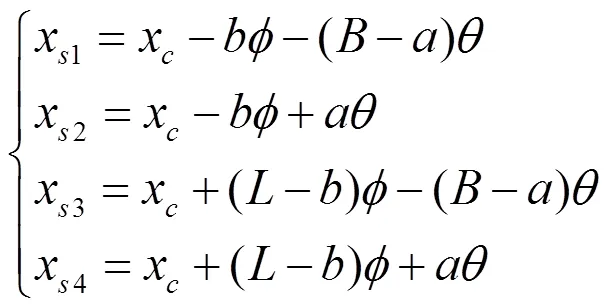
根据系统动力学原理可推出关于整车模型被动悬架系统动力学的相关微分方程,其中式(1)为整车车体质心运动方程,式(2)为俯仰角运动方程,式(3)为侧倾角运动方程,式(4)~式(7)前后左右非簧载质量的垂向运动微分方程,式(8)车身前后左右四个端点处的垂向位移与车体之间的空间关系




2 被动悬架特性分析的MATLAB/ Simulink实现
基于上述式(1)~(8)所表达的微分方程,可在MATALB软件的SIMULINK模块中建立悬架系统特性仿真模型,现按照地面输入模型、前(后)悬架非簧载质量模型和含被动悬架半车模型将其建模过程分述如下。
1)地面输入模型。采用白噪声——积分器的方法模拟路面粗糙度。当车速一定时,谱密度为常数Gxr(f),于是路面轮廓可由谱密度Gxr(f)1/2的白噪声——积分器产生[5]。
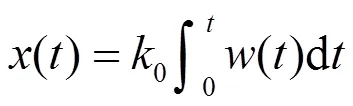
根据(9)式,可在MATLAB/Simulink中可建立路面输入模型,如图2所示。前后轮胎的输入模型具有时间差,其时间间隔为t = L/u。
Fig .2 Power spectrum density of road surface
2)前左悬架非簧载质量模型。根据式(4)可以建立前左悬架非簧载质量仿真模型,如图3所示。该模型有两个输入:一个是地面输入xr1,一个是前车体位移输入xs1;一个非簧载质量的位移输出xt1。同理根据式(5)~式(7)可建立前右、后左、后右悬架非簧载质量仿真模型,图略。
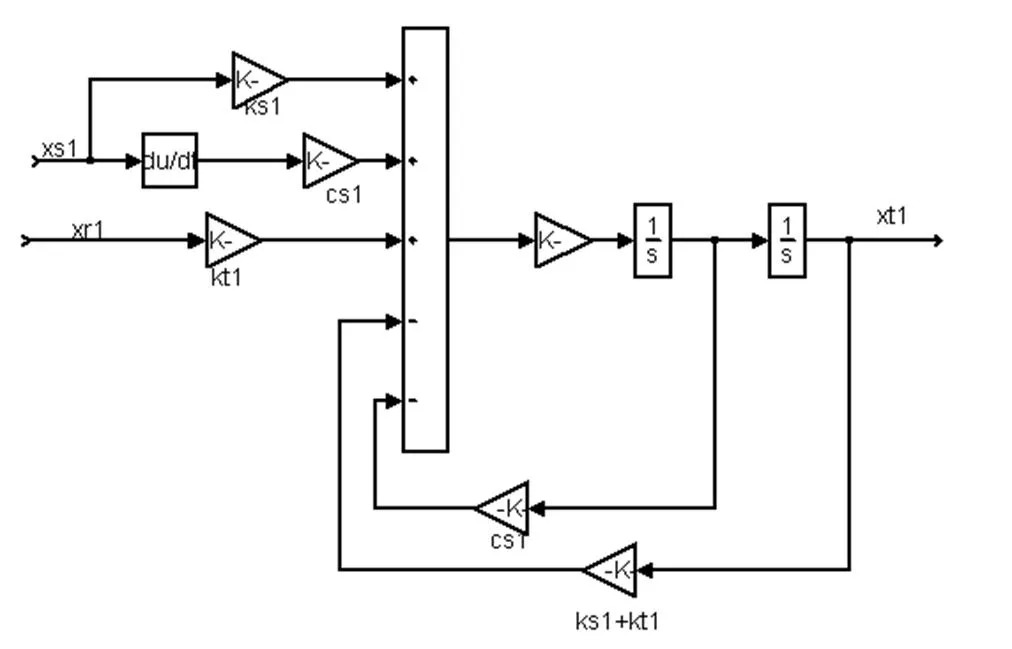
图3 前左悬架非簧载质量的仿真模型

图4 四个端点的空间关系仿真模型
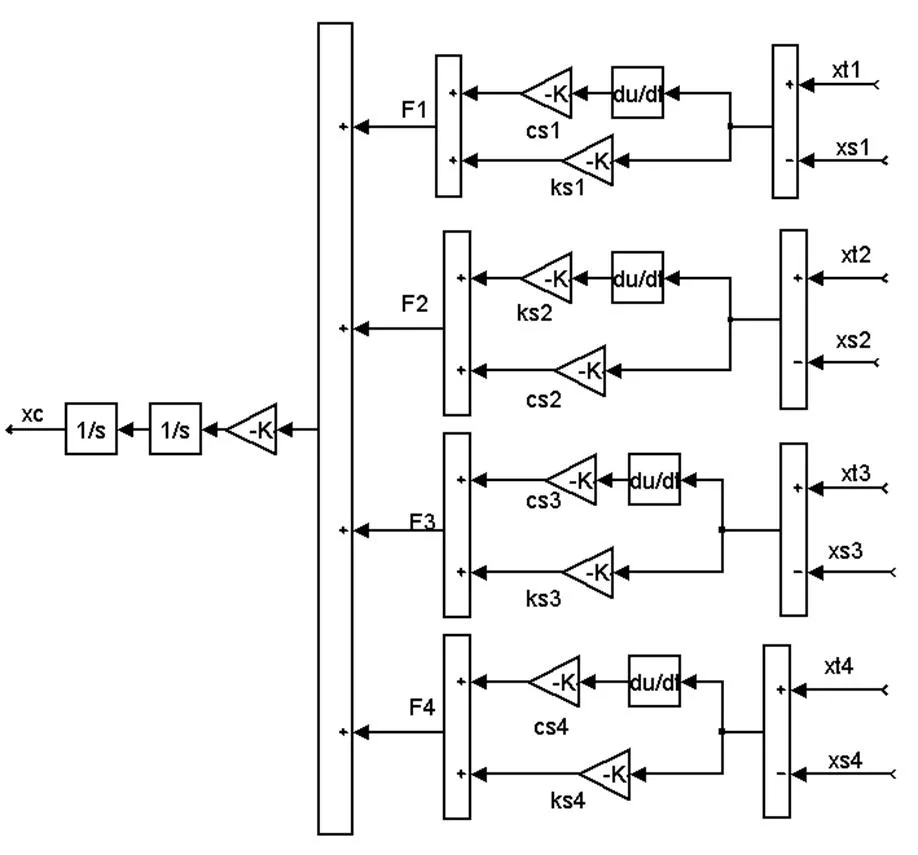
图5 车身质心处的垂向运动仿真模型
3)含被动悬架整车模型。由式(8)可建立图4车体运动模型,其中三个输入分别为俯仰角Φ、侧倾角θ和质心加位移xc,四个输出分别为前后左右车体位移xs1、xs2、xs3和xs4。再根据式(1)~式(3),可建立整车模型的如图5质心处的垂向运动仿真模型图、图6车体俯仰运动仿真模型图和图7车体侧倾运动仿真模型图。结合图1~图7可建立图8的含被动悬架整车模型
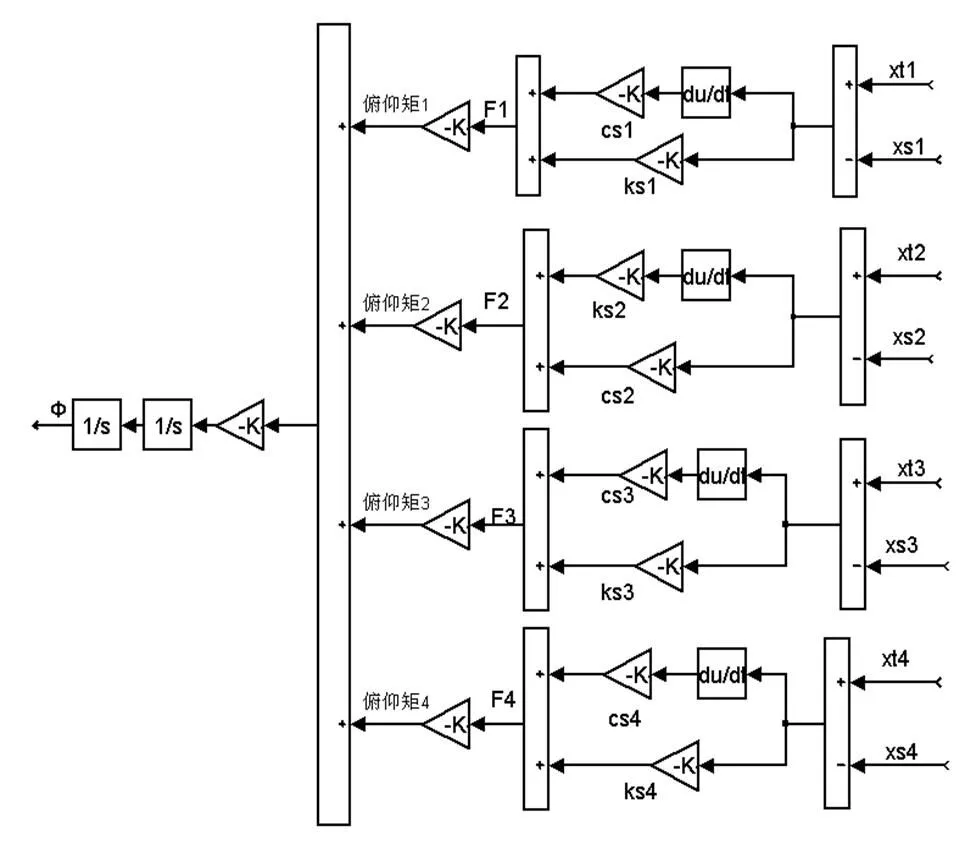
图6 车体俯仰运动仿真模型
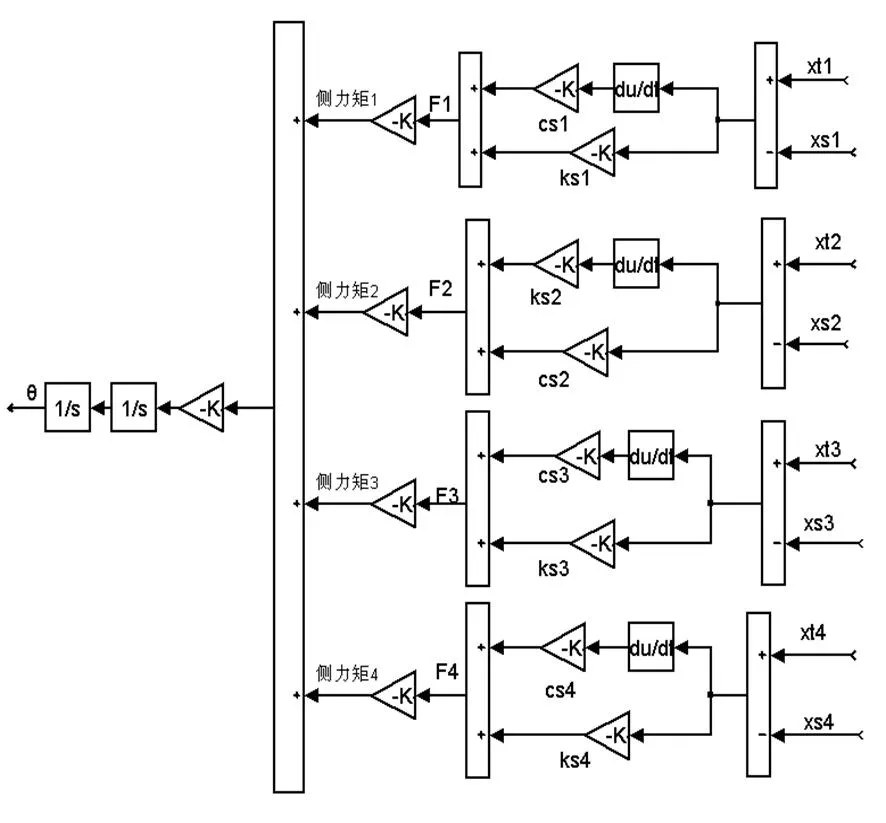
图7 车体侧倾运动仿真模型
4 仿真与分析
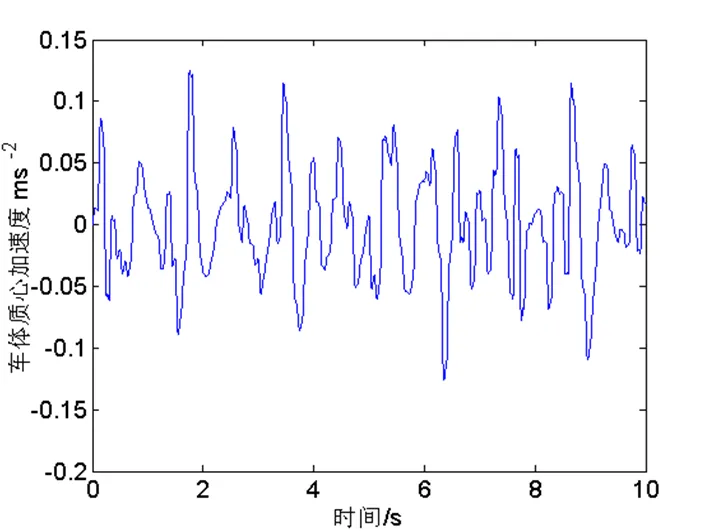
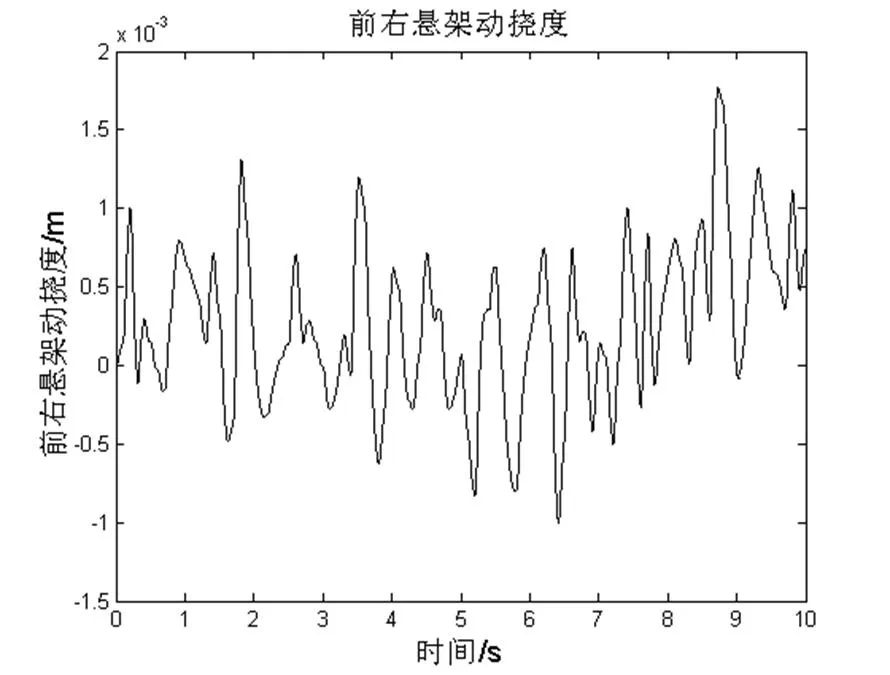
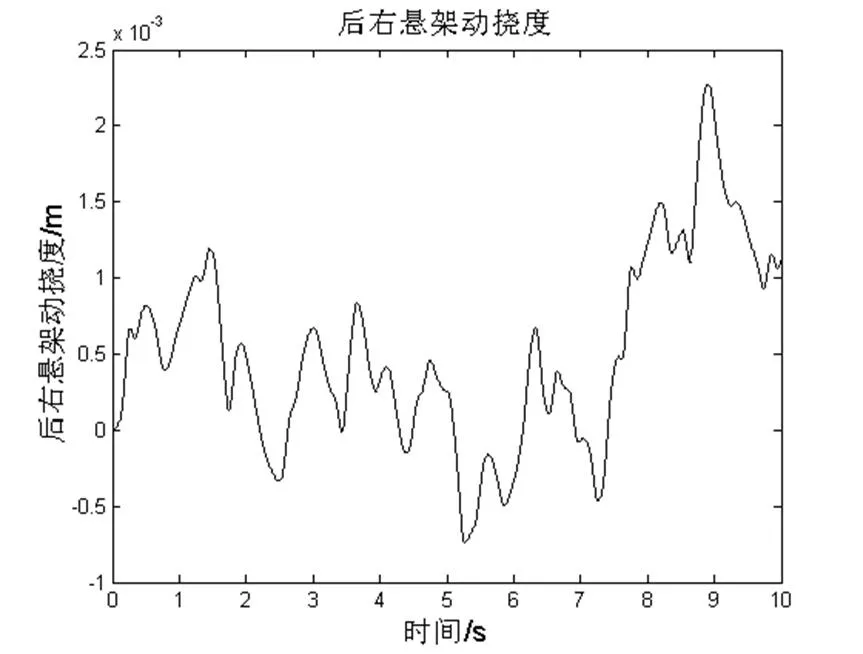
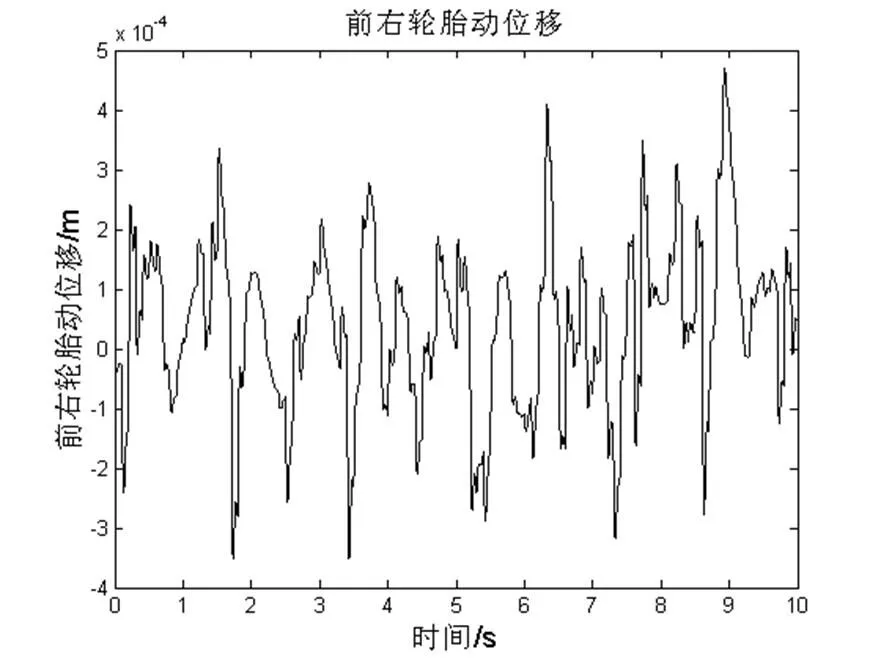
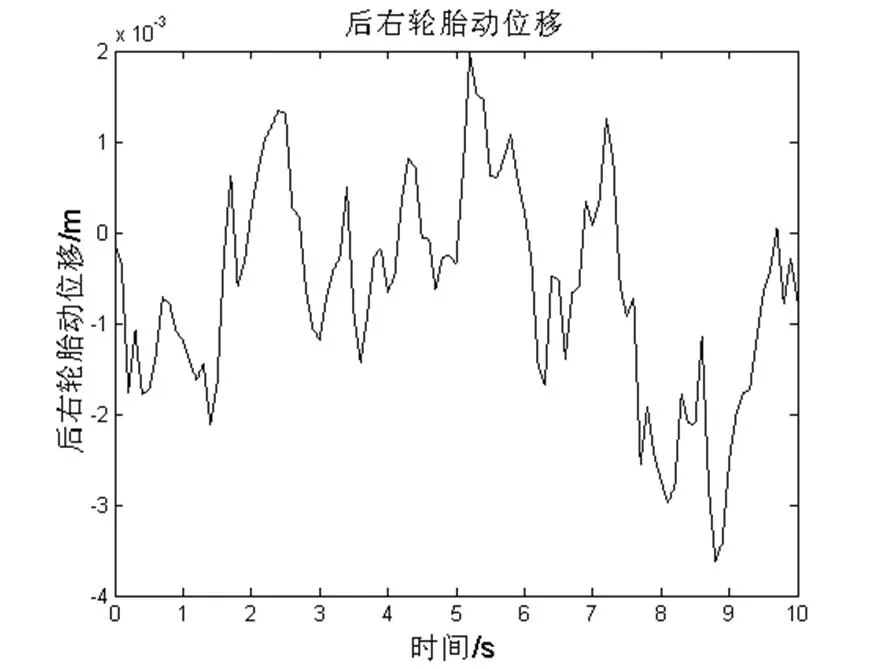
取某车型参数为:ms=810kg,JΦ=300kgm2,Jθ= 1058kgm2,L = 2.36m,B = 1.3m,a = 0.65m,b = 1.14m,ks1= ks2=20600 N/m,ks3= ks4= 15200N/m,cs1= cs2= 1570 Ns/m,cs3= cs4= 1760 Ns/m,kt1= kt2= kt3= kt4=138000 N/m,mt1= mt2= 26.5 kg,mt3= mt4= 24.4 kg,u = 40 km/h地面输入为积分白噪声模型。运行前述图8所示仿真程序,可分别得到车体加速度特性仿真曲线9,其中图9a)为质心加速度仿真图,9b)为俯仰角加速度仿真图,9c)为侧倾角加速度仿真图;前后左右四个悬架动挠度仿真曲线10,其中图10a)为前左悬架动挠度仿真图,10b)前右悬架动挠度仿真图,10c)为后左悬架动挠度仿真图,10d)后右悬架动挠度仿真图;前后左右轮胎动载荷仿真曲线11,其中图11a)为前左轮胎动位移仿真图,11b)前右轮胎动载荷仿真图,图11c)为后左轮胎动载荷仿真图,图11d)为后右轮胎动载荷仿真图。该车型在结合K&C试验台性能实验数据的基础上,验证了该仿真模块的可行性。以此为平台可以仿真验证各种车型参数的设计是否合理,并且通过该平台可以对汽车悬架进行优化设计,而且该模型可以仿真汽车在加速、制动等各种情况下,汽车的行驶平顺性和乘坐舒适性。该模型为汽车悬架的设计缩短了周期,节省了生产成本。
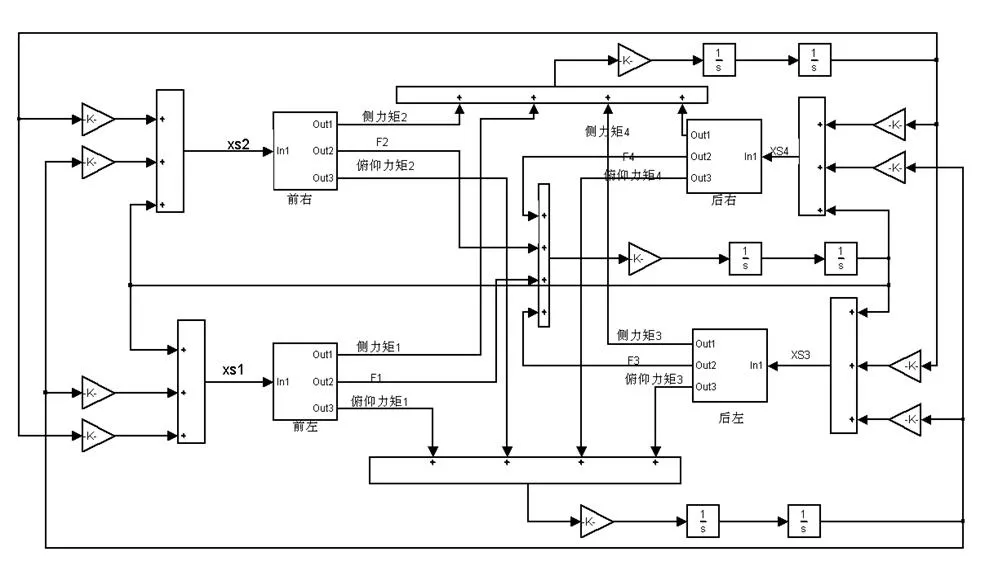
图8 整车悬架系统的仿真模型
a) b) c)
a)b)
c)d)
图10 前后左右四个悬架动挠度仿真曲线
Fig.10 Dynamic deflection simulation curves of front-rear-left-right suspension
a)b)
c)d)
图11 前后左右四个轮胎动位移仿真曲线
Fig.11 Dynamic displacement simulation curves of front-rear-left-right suspension
通过对图9~图11的仿真结果分析研究,对于整车模型的的相关性能都满足设计要求。但是在车身加速度、车体俯仰角或者是侧倾角方面的振动都较大,对汽车的整体性能以及人们乘坐时的舒适性和操作稳定性都有较大的影响;前后左右四个悬架系统的悬架动挠度和轮胎动位移的变化也较大,不利于汽车的乘坐时的舒适性和操作稳定性。通过对图10和图11分析可以看出四个悬架系统的悬架动挠度和轮胎动位移输出也是各不相同主要由于路面输入对前后悬架系统具有时间间隔,前后悬架的弹簧刚度和减震器阻尼不同以及车体前后不对称等原因引起的前后输出不一致。对于侧倾角由于左右不对称以及其他一些外在影响因素,因此利用该研究方法可以更加贴近实际情况。
4 小结
依据达朗贝尔原理建立整车被动悬架系统的数学模型,利用MATLAB/Simulink仿真软件建立相应的仿真模型,可实现整车模型动态特性仿真,其主要有以下特征:
1)相对于1/4车体模型和半车模型悬架系统来说,该仿真模型能更好的反映汽车的真实情况。
2)在研究整车系统动力学方面,该研究方法可简化其研法过程,缩短其相关的研法周期。
3)该仿真模型可使用于各种车型的动力学研究,不需要重复建模,该模型具有通用性。
4)该仿真模型可模拟汽车在不平路面的激励作用下、加速或者制动过程中汽车的震动情况,因而可更好地模拟汽车的实际工况,使研究更切合实际。
[1] 马宝山.汽车悬架振动主动控制技术研究[D].哈尔滨:哈尔滨工程大学,2003.
[2] 兰波,喻凡.车辆主动悬架LQG控制器的设计与仿真分析[D].农业机械学报,2004(1):46-49.
[3] 喻凡.汽车系统动力学[M].北京:机械工业出版社,2005.
[4] 周云山.汽车电子控制技术[M].北京:机械工业出版社, 2001.
[5] 张海涛,高洪.具有LQG 控制器的主动悬架半车模型动力学分析与仿真[J].安徽工程大学学报,2012(3):42-45.
MODELING AND SIMULATION ANALYSIS OF ENTIRE VEHICLE PASSIVE SUSPENSION
*ZHANG Hai-Tao1, GAO Hong2
(1. Department of Automobile Engineering, Anhui Technical College of Mechanical and Electrical Engineering , Wuhu, Anhu 241000, China;2. School of Mechanical and Automotive Engineering, Anhui Ploytechnic University, Wuhu, Anhu 241000, China)
Entire vehicle dynamic models of passive suspension were built on the basis of theory of system dynamics. Input model of road roughness based on white noise-integrator, non-spring loading quality model with front suspension, rear suspension, left suspension, right suspension and kinematics model of body were integrated to mode and realize properties simulation of passive suspension in MATLAB/Simulink. Analyzing simulation results verified that entire vehicle dynamic model with passive suspension and corresponding simulation model were correct. The contribution of the paper provided technical basis for design and optimization of suspension parameter.
passive suspension; entire vehicle dynamic model; characteristic simulation
O178
A
10.3969/j.issn.1674-8085.2013.03.014
1674-8085(2013)03-0058-05
2012-07-13;
2012-09-21
*张海涛(1985-),男,安徽寿县人,讲师,硕士,主要从事汽车理论及其应用技术等研究(E-mail: zhanghaitao5238@163.com);
高 洪(1963-),男,安徽枞阳人,教授,博士,硕导,主要从事研究方向为现代设计理论与CAD等研究(E-mail: gaohong0706@ahpu.edu.cn).
猜你喜欢
天津外国语大学学报(2021年1期)2021-03-29 03:07:20
疯狂英语·新策略(2019年9期)2019-10-17 01:51:34
趣味(语文)(2019年5期)2019-09-02 01:52:44
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
北京汽车(2016年6期)2016-10-13 17:07:50
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
机械制造与自动化(2014年1期)2014-03-01 04:21:44
汽车维护与修理(2014年10期)2014-02-28 12:15:00