基于抗饱和PI调节器的BUCK变换器的设计与实现
2013-10-23 09:56江澜,蔡文
上海师范大学学报·自然科学版 2013年1期
江 澜,蔡 文
(上海师范大学信息与机电工程学院,上海200234)
0 引言
PID控制是发展最早、应用最广的一种控制策略,由于其算法简单、鲁棒性较好、可靠性高,被广泛应用于各类工业控制的算法设计中[1-2],特别在不完全了解一个系统或被控对象的实际参数,或不能通过有效的测量手段来获得准确的系统参数时,往往采用PID控制[2].
在电力电子变换器的设计中,由于系统本身是一个非线性、时变系统,因而常常采用PID控制器进行设计.在实际应用中,由于系统对快速性的要求不那么高,因而在系统设计中常常采用PI调节器[1].在PI调节器的设计中,若PI算式中的积分量积累了过大数值,以至于超出执行元件的极限能力,就会出现积分饱和现象[1-2],进而影响系统性能.本文作者基于TI公司的DSP2812设计并实现了一种抗饱和的数字PI调节器,将其应用于BUCK变换器的控制中,采用电流、电压双闭环控制[3],取得了良好的动、静态性能.
1 BUCK电路结构
BUCK变换器的基本电路拓扑结构如图1所示[4-5],其中DC为输入的直流电压,全控型器件IGBT作为开关管V与反向并联的续流二极管VD一起构成控制模块,以控制从电源端输出到负载端的能量.图1中L和C构成低通滤波电路,Z为负载.设主回路电流为IL,输出直流电压为Uo.
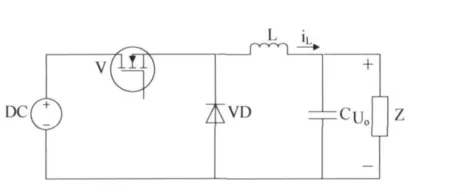
图1 BUCK电路原理图
图2是开关管V导通时的等效电路[4-5].当V闭合时,直流电源向负载供电,在此阶段,电感L充电储能,主回路电流呈线性增长,续流二极管VD由于两端施加反向电压而截止.
图3是开关管V截止时的等效电路[4-5].当开关管V截止时,直流电源与负载端开,电感L释放能量,二极管VD续流.在此阶段,电感L通过负载放电,主回路电流线性减小.为了使输出电压满足要求,有必要在负载端并联合适的电容.
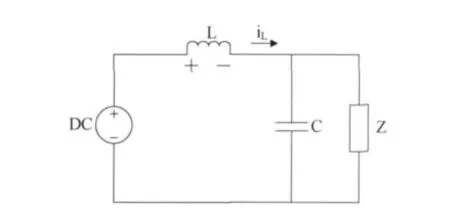
图2 开关V导通时的等效电路
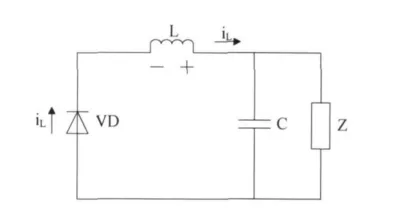
图3 开关V断开时的等效电路
BUCK变换器可以输出两种类型的直流电压[6]:一是输出电压可在一定范围内调节控制;二是输出一个恒定的直流电压.本次设计的是输出恒定电压的BUCK变换器.
2 BUCK变换器闭环控制系统及抗饱和数字PI调节器的设计
2.1 BUCK变换器闭环控制系统
为提高BUCK变换器的静态、动态性能,采用电压外环、电流内环的双闭环控制系统[3],示意图如图4所示.
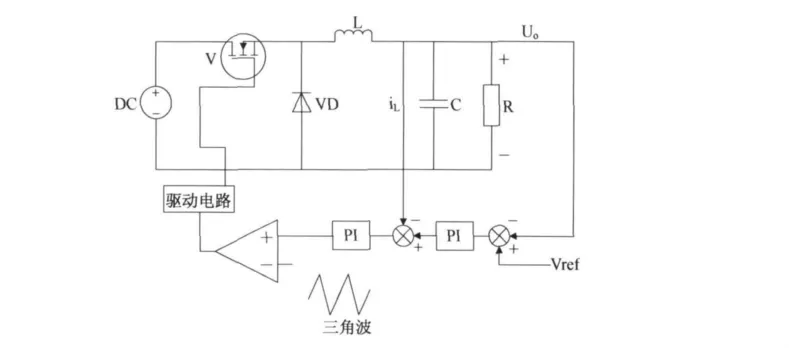
图4 BUCK变换器控制示意图
在图4中,将参考电压Vref与检测到的输出电压Uo相减,结果送入电压环的PI调节器,该PI调节器的输出信号即为电流内环的参考输入信号.同时,将在主回路中检测到的电流IL作为反馈信号与电流参考信号相减,结果送入电流环的PI调节器,并与三角载波做比较,得到开关管V的PWM脉宽调制信号.BUCK变换器控制系统框图如图5所示,其中的电流内环能够限制主回路最大电流,快速抑制电源扰动;电压外环,能够稳定输出电压.
2.2 抗饱和数字PI调节器的设计
PI调节器的控制规律为[2-3]:

其中,u(t)为PI控制器的输出,e(t)为PI调节器的输入,Kp为比例系数,TI为积分时间常数.对上式进行离散化处理,则PI控制算法表达式为:
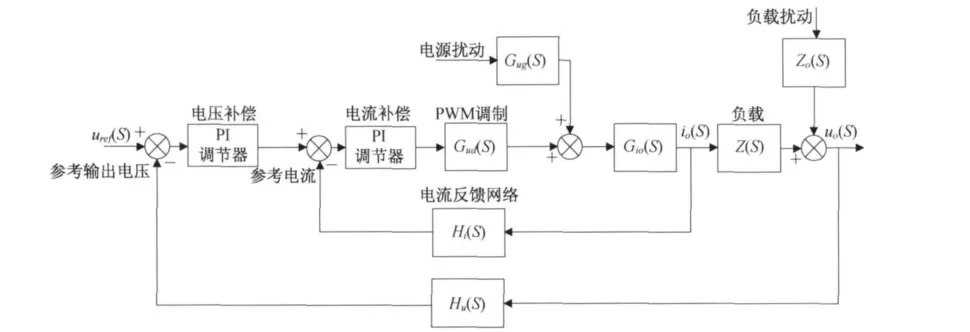
图5 双闭环控制系统框图

其中k=0,1,…,表示采样序列,u(k)表示第k次采样时刻PI调节器的输出值,e(k)表示第k次采样时刻输入的偏差值,Ts表示采样周期,Kp为比例系数,Kt为积分系数.
常用的数字PI调节器有位置式和增量式控制算法[2].采用位置式算法:PI调节器的输出可以直接控制执行机构.这种算法的优点是计算精度比较高,缺点是每次都要对e(k)进行累加,容易出现积分饱和现象.一旦出现积分饱和的情况,就会引起执行机构位置的大幅度变化,造成被控对象的不稳定.为抑制这种情况的出现,采用位置式抑制积分饱和的PI算法,其表达式为:
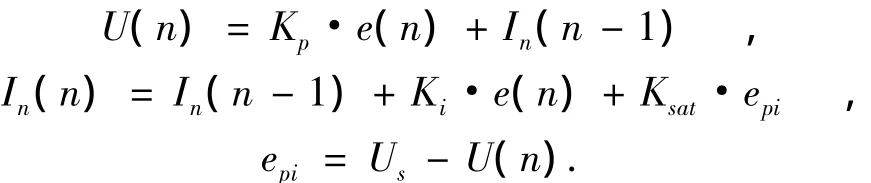
其中:当 U(n)≥Umax时,Us=Umax;当 U(n)≤Umin时,Us=Umin.Us为PI算法的饱和输出;U(n)表示本次的PI调节器的计算结果;Kp为比例调节系数,Kt为积分系数,Ksat为抗饱和系数,In(n)为本次积分累加和,Umax、Umin分别为PI调节器输出的最大值和最小值.抗饱和PI调节器算法的程序框图如图6所示.
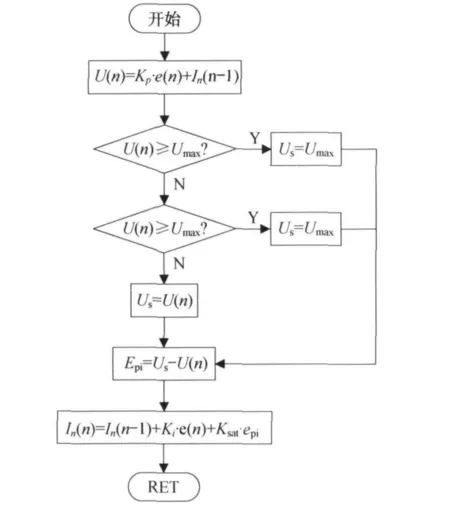
图6 抑制积分饱和的PI算法
3 实验结果及其分析
为验证设计的效果,在一台功率为5.5 KW的BUCK变换器的实验平台上进行了实验.在图1中的输出端并联390μF/500 V电容,在主回路中串联的电感容量为1205μH,开关频率为20 KHz.主电路中的电压、电流检测均由霍尔传感器实现.
经过处理后的模拟量送入DSP内置的A/D口,完成到数字量的转换,各种运算及控制算法均由DSP编程实现.
可变直流输入电压最大为60 V,设输出稳定直流电压为15 V,带电阻性负载,进行了以下实验:
(1)电源电压变化:输入电压从20 V突增到30 V,得到的输出电压、输出电流及PWM控制信号波形如图7所示.
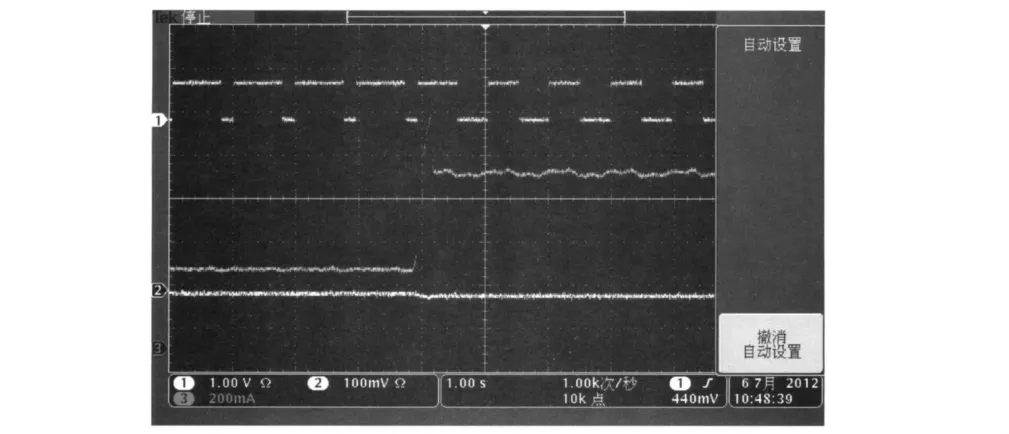
图7 电源扰动时驱动信号、电流、电压波形
(2)改变负载大小:将负载从18.3Ω突加到27.5Ω,得到电压、电流及PWM控制信号波形如图8所示.
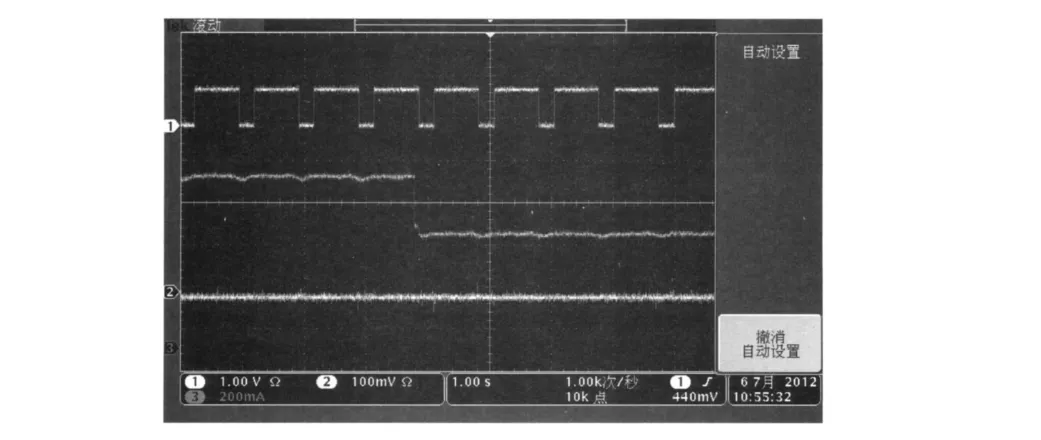
图8 负载扰动时驱动信号、电流、电压波形
图7、8中的波形为数字式多踪示波器的输出结果,其中第1踪为开关管V的驱动信号;第2踪为主回路电流波形,第3踪为输出电压波形.
由图7可见,PWM信号脉宽变窄,电流突增,但经过短暂时间后(小于100 ms),电流趋于稳定.电压经过微小扰动后同样趋于稳定.
由图8可见,随着负载的改变,主回路中的电流随之改变,但是输出电压稳定.
4 结论
由于PID参数直接影响着控制效果的好坏,本文作者采用工程整定方法,依赖工程经验,直接在控制系统的实验中进行PI参数整定[2],方法简单、调整方便.将有抑制饱和积分功能的PI调节器运用于BUCK变换器的电压外环、电流内环的设计中,起到了稳压限流的作用,系统取得了良好的动、静态性能[6].实验结果验证了设计的有效性.
[1]ALI E,ALIREZA K,ZHONG N,et al.连晓峰译.集成电力电子变换器及数字控制 [M].北京:机械工业出版社,2011.
[2]白志刚.自动调节系统解析与PID整定[M].北京:化学工业出版社,2012.
[3]BUTI B,NAGY I.Stability analysis of PWM-controlled dual channel resonant buck converter using PI controller[C]∥IEEE SPEEDAM 2006,Palazzodei Congressi Taormina:IEEE Inc,2006:208 -213.
[4]杜飞,林欣.电力电子技术的MATLAB仿真[M].北京:中国电力出版社,2009.
[5]曹霞,关振宏,黄栋杰,等.Buck变换器在Matlab/Simulink下的仿真研究[J].电器开关,2009,47(6):23-25.
[6]BRADLEY M,ALARCON E,FEELY O.Analysis of limit cycles in a PI digitally controlled buck converter[C]∥IEEE ISCAS 2012,Seoul:IEEE Inc,2012:628 -631.
猜你喜欢
电工技术学报(2023年15期)2023-08-10
电气技术(2023年7期)2023-08-08
北京航空航天大学学报(2022年5期)2022-06-06
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
电测与仪表(2015年3期)2015-04-09
微特电机(2012年12期)2012-11-22