
配电网带电作业仿真培训系统的设计和开发
2013-10-21 11:17:20江全才马骁旭魏飞翔林奇祥
三峡大学学报(自然科学版) 2013年5期
江全才 马骁旭 魏飞翔 林奇祥
(三峡大学 电气与新能源学院,湖北 宜昌 443002)
带电作业是保障供电可靠性和连续性的主要方法.在配网带电作业中采用绝缘斗臂车绝缘手套作业法,可以大大提高工作效率,同时还弥补了配电线路不宜采用等电位作业的缺陷[1].目前针对绝缘斗臂车绝缘手套作业法的带电作业培训主要以实训为主,这种方式往往受到培训设备、培训指导等诸多因素的限制而使培训效果大打折扣.为弥补实训的不足,本文提出了基于虚拟现实技术的配网带电作业仿真培训系统.
1 系统设计方案
配网带电作业仿真培训系统真实地还原了带电作业现场.系统主要由主控计算机装置、运动仿真系统和视景仿真系统组成.运动仿真系统主要模拟绝缘斗臂车的操作和运动;视景仿真系统用于模拟绝缘手套作业法并展现虚拟作业场景;主控计算机装置是系统的控制中心,用于处理运动仿真系统和视景仿真系统的信息并作出反馈.
在培训中,受训者可以在具体的带电作业项目中利用硬件与系统实时交互,学习带电作业的关键技术.目前该系统针对绝缘斗臂车绝缘手套作业法所开发的带电作业项目有10kV单回更换边相耐张绝缘子、10kV更换分段开关等等,作业项目的开展是按照标准化的作业流程进行的.培训中培训人员通过硬件与培训系统产生互动,在虚拟的作业现场中进行带电作业的学习.
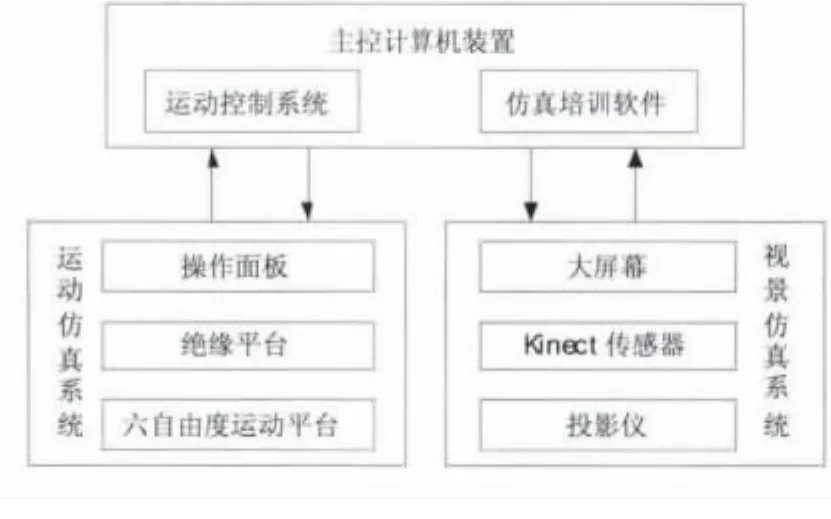
图1 带电作业仿真培训系统的构成
2 系统的关键技术
2.1 仿真培训软件
系统培训的实现主要依靠基于虚拟现实技术,利用多种软件平台开发的仿真软件.仿真软件的设计制作首先是要构建虚拟作业场景,再利用设计制作的程序实现硬件设备与虚拟作业场景的交互.本培训系统采用3DMAX等软件进行虚拟作业场景的开发,利用JAVA、C++等程序语言制作功能模块并在Quest 3D平台上实现硬件设备与虚拟作业场景的交互.
3DMAX是集模型构造、渲染和三维动画制作于一身的三维制作软件,培训系统利用3DMAX可以真实的构建配电线路的虚拟场景,采用层次建模方法,即先按照虚拟场景中实物的尺寸制作出各种模型,并建立模型库,如各种类型杆塔、导线、绝缘子、金具等配电线路中的设备元件,然后导入3DMAX构建的线路环境中,进行整体装配,进而完成带电作业虚拟作业场景的开发.
Quest 3D是应用在游戏开发、虚拟现实、影视功能制作等领域的三维项目制作软件,将已构建的配电线路带电作业虚拟场景导入到Quest 3D中,利用Quest 3D进行带电作业人员进行带电作业的交互式动作设计.本培训系统使用Kinect实现培训人员与虚拟场景的交互,Kinect是一款游戏主机的体感外设,可以同时获取RGB和深度图像数据,支持实时的全身和骨骼跟踪,并可识别一系列的动作.使用Kinect的最大优点在于可以直接通过人体的动作完成对系统的控制,即在培训中受训者可以直接做出动作对虚拟设备进行操作.由于在Quest 3D中不能直接驱动并读取Kinect设备的信息,需要通过Quest 3D的SDK使用VC++进行编程扩充此功能.SDK是Quest 3D的应用程序开发工具包.利用SDK,用户可以建立自己的应用程序,这些应用程序通过应用程序接口(API)将结果返回Quest3D系统.在交互过程中Quest 3D需要实时进行碰撞检测[4],如人的手部与工器具碰撞并动作实现作业工具的拾取,人的手部与带电设备碰撞并动作实现具体的操作等功能.
2.2 视景仿真系统
视景仿真系统主要利用Kinect实现模拟绝缘手套作业法在虚拟场景中进行交互操作以及将作业现场的实时变化通过大屏幕进行展现.受训者在Kinect设备的动作即是带电作业现场需要借助绝缘手套完成的操作.Kinect设备的配置主要是基于SDK中的API函数进行人体骨架识别从而获得手势位置及动作意义[5].系统具体的配置流程为:1)初始化设备,打开颜色流、深度流和骨架流;2)捕捉受训者,获得数据帧,转化为OpenCV中的图像类型;3)分析跟踪并判断当前状态以及控制权;4)通过主控计算机处理反馈至视景仿真系统并描绘图像.当受训者进行操作时虚拟场景的变化会通过视景仿真系统进行展现,培训流程与视景仿真系统的变化如图2所示.
2.3 运动仿真系统的开发
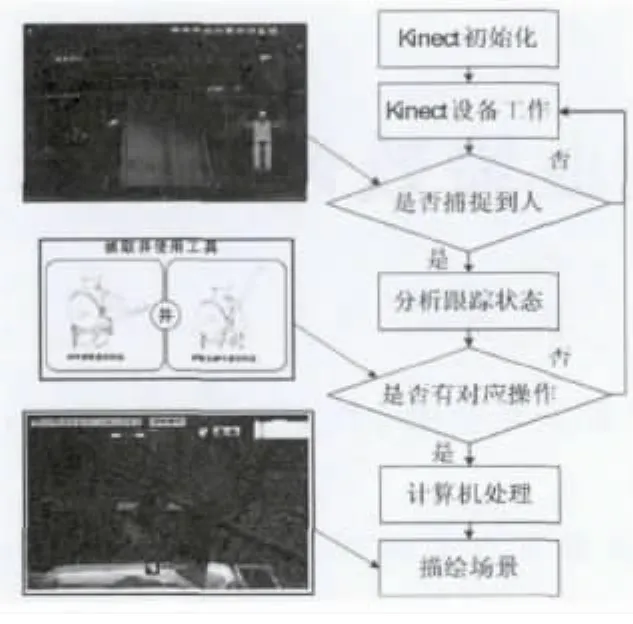
图2 培训流程与仿真培训系统的变化示例图
在培训过程中,培训人员通过操作面板控制六自由度运动平台来模拟绝缘斗臂车的操作.所采用的并联式六自由度运动平台具有高精度、高度承载能力、动态特性好等优点,被广泛应用于各种训练模拟器,例如飞机飞行模拟器、地震模拟器等[6].它通过6个液压缸的协调运动使平台可以在空间内沿任意曲线移动,也可以绕空间任意轴线转动.在配网带电作业仿真培训系统中采用此平台可以很好地模拟绝缘斗臂车的运行.
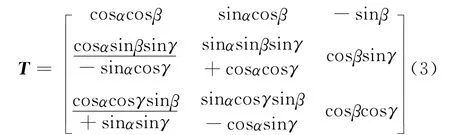
在模拟绝缘斗臂车的过程中,已知斗臂车的运动形式,通过设定六自由度运动平台的位置,来控制6个液压缸的伸缩量,即可对绝缘斗臂车运动进行模拟,此过程称为位置逆解.分析过程可以通过引入坐标系,进行坐标变换求得,例如模拟绝缘斗臂车下臂的左右旋可以用六自由度运动平台的左右旋来表现,为增加真实感会有适当的侧倾,所建立的坐标系如图3所示,假设上平台已移动至图中所示的位置,可以对其中的一个液压缸的伸缩量进行分析,进而得到运动控制系统的控制原理.
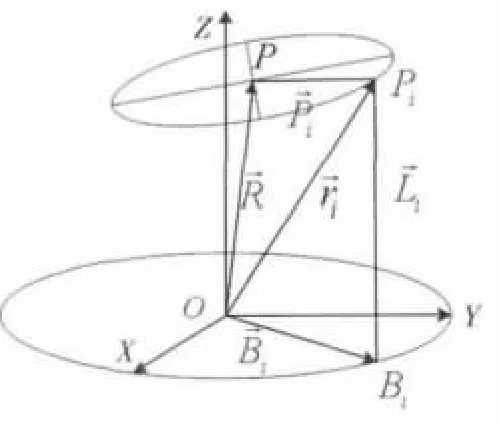
图3 并联六自由度运动平台矢量图
六自由度运动平台的下平台是固定的,可以圆心O为原点建立静坐标系,上平台为运动的,可以圆心P为坐标原点建立动坐标系,Bi、Pi分别为上下平台的铰点,分析可知液压缸的运动矢量为


3 结 语
配网带电作业仿真培训系统基于虚拟现实技术开发,可应用于采用绝缘斗臂车绝缘手套作业法的带电作业仿真培训.该系统集成了多项技术,再现了配网带电作业的场景和流程,通过使用六自由度运动平台和Kinect设备与系统进行交互,真实地模拟了绝缘斗臂车的各种操作和运动形式,模拟了绝缘手套作业法的具体作业方法和表现形式.通过三维影像和声音等多媒体表现形式,使学员沉浸在如同真实的带电作业环境中.该系统弥补了目前配网带电作业培训的不足,具有实用性、互动性、娱乐性等特点,是虚拟现实技术在电力培训上的具体应用.
[1] 张六荣.带电检修[M].北京:中国电力出版社,2005:238-239.
[2] 漆晓霞.基于虚拟现实的变电站仿真培训系统的研究[D].北京:华北电力大学,2009:1-58.
[3] 陈奇朋,罗滇生,胡 强,等.基于虚拟现实技术的电力作业仿真培训系统[J].计算机工程与应用,2012(3).
[4] 刘检华,姚 瑁,宁汝新,等.基于虚拟装配的碰撞检测算法研究与实现[J].系统仿真学报,2004,16(8):1775-1778.
[5] 黄康泉,陈壁金,郑 博,等.Kinect在视频会议系统中的应用[J].广西大学学报:自然科学版,2011,36(z1):308-313.
[6] 欧阳吕卫.电液控制六自由度运动平台联合仿真研究[J].2010(6):22-33.
猜你喜欢
经济技术协作信息(2018年33期)2018-12-06 08:56:08
电子测试(2018年18期)2018-11-14 02:31:08
电子测试(2018年4期)2018-05-09 07:28:19
电子测试(2017年23期)2017-04-04 05:07:50
商周刊(2017年24期)2017-02-02 01:42:55
海外星云(2016年7期)2016-12-01 04:18:00
现代工业经济和信息化(2016年4期)2016-05-17 05:35:38
IT时代周刊(2015年8期)2015-11-11 05:50:37
舰船科学技术(2015年8期)2015-02-27 15:38:41
振动、测试与诊断(2014年4期)2014-03-01 01:14:11
