
双层单点自动调整水平基准平台的研制
2013-10-20 10:37殷剑萍
机械制造与自动化 2013年5期
殷剑萍
(南京电表厂,江苏南京210000)
0 引言
车载水平基准平台在很多领域有着广泛的需求和应用,如一些测量仪器需要用高精度水平平台作基准,一些军用装备如两坐标雷达天线等也需要水平平台作基准。目前调整车载水平平台的方法,都是对承载车辆进行整体调平。在车身四角安装支撑腿,通过对支撑点高度的调整,使平台达到水平。结构按支撑点分为三点调平、四点调平和六点调平等,结构笨重,调整复杂。这些方法只适用于那些质量在十几甚至几十吨的重载装备,对于质量在几十至几百千克重的荷载就显得不太合适。双层单点自动调整水平基准平台,采用了与目前不同的调平支撑结构,其结构轻巧、安装固定可靠,调平方式简便,是一种只对车载设备本身进行调平的车载平台,双层单点自动调整水平基准平台的研制,弥补了目前使用的调平方法存在的不足,满足了轻量化装备对水平基准平台的需求。
1 平台结构的设计
为了满足水平基准平台固定安装于运载车辆上的要求,平台结构必须轻巧,安装固定可靠,调平快速、简便。平台设计为上下两层,每层由两平行轴铰接支撑固定,由伺服电动机驱动蜗杆丝杠减速升降机升降调平。设计的平台结构如图1所示。
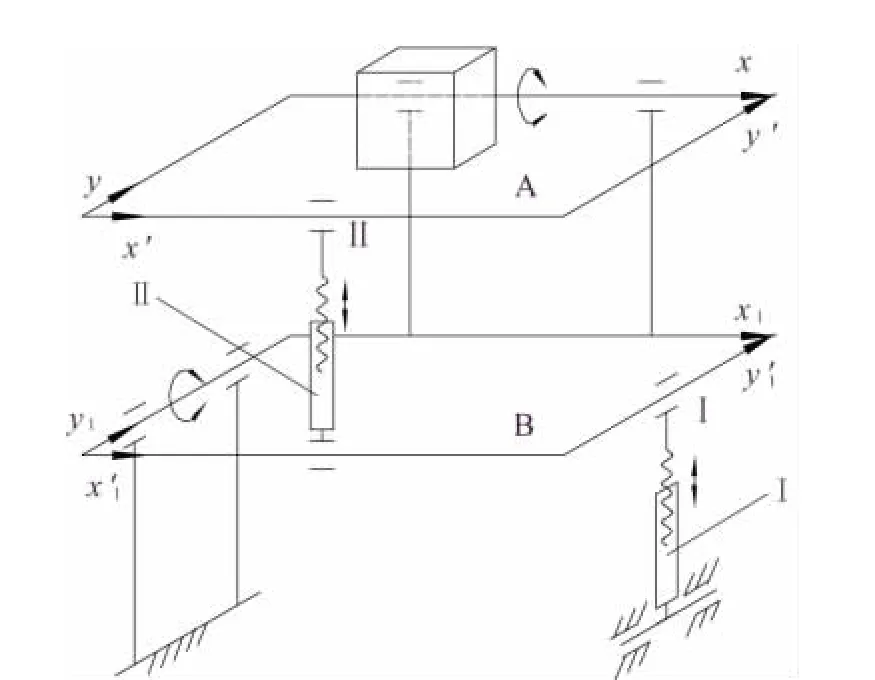
图1 基准平台结构示意图
下层平面(B)上的y1轴与y1'轴是平行的二轴,以铰接方式分别与固定在机座上的支架和升降机(Ⅰ)连接,升降机(Ⅰ)以铰接方式固定在机座上。上层平面(A)上的x轴与x'是平行的二轴,以铰接方式分别与固定在下层平板上的支架和升降机(Ⅱ)连接,升降机(Ⅱ)以铰接方式固定在下层平面上。下层平面在升降机(Ⅰ)的上下运动作用下可绕y1转动一定的角度。上层平面在升降机(Ⅱ)的上下运动作用下可绕x转动一定的角度。下层的升降机(Ⅰ)与上层的升降机(Ⅱ)各控制一个方向的倾斜角度,上层平面在x轴方向的倾斜角度,随着下层平面的调整而调整,上层平面在y轴方向的倾斜角度由升降机(Ⅱ)调整,这样上层平面就可实现在x轴和y轴两个方向上倾斜角的调整。上层为承载层,设备安装于上层。
如图1所示,结构采用一个固定点和三个铰接点支撑,其优点在于:铰接点支撑的层面倾斜角度,随着升降机的上下运动而变化,升降机自身也随着层面倾斜角度的变化而改变支撑角度,并且支撑稳定,不会发生支撑不实情况,也不会出现摇摆倒伏、干涉咬死等现象。
根据需要,在每层平面上也可选用两个升降机安装在平面的两个角上来顶推平面,用以分担平面载荷,升降机传动配置为串联组合来实现同步升降,因其调平原理与单个升降机在中间位置顶推平面相同,故在此不作讨论。
升降机采用蜗杆丝杠减速机构,电动机驱动蜗杆转动(也可以手动),蜗杆带动蜗轮旋转,蜗轮带动丝杠旋转,丝杠推动活动螺母上下运动。蜗杆丝杠减速机构具有结构紧凑,工作可靠,静止时自锁性能好,电动、手动两用,制造成本低等优点。结构见图2。
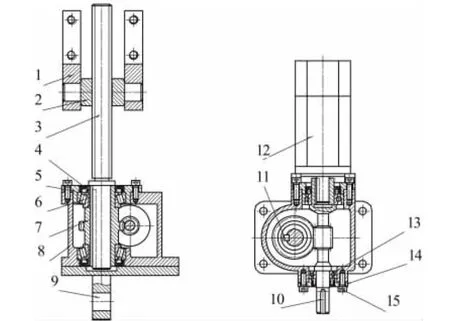
图2 升降机结构图

式中:P1——输入功率(kW);T1——输入扭矩(Nm);n1——输入转速(r/min)。

式中:W——单台升降机当量载荷(N);L1——丝杠螺距(mm);i——减速比;π——圆周率;η——升降机的综合效率;T0——空载扭矩(Nm)。

式中:V——升降机活动螺母升降速度mm/min;

确保PCR>W×SF
式中:PCR——临界载荷(N);d3——丝杠底径(mm);fm——支撑系数(两端支撑fm=105);La——作用点间距离(mm);W——单台升降机当量载荷(N);SF——安全系数(一般SF=4)。


式中:nc——临界转速(r/min);d3——丝杠底径(mm);fn——长度系数(轴端自由fn=0.36);Lb——支撑间距离(mm);ns——丝杠转速(r/min);n1——输入转速 (r/min);i——减速比;确保:nc>ns
2 调平原理及方法
已知,两条相交直线或两条平行线可确定一个平面,当一个平面上有两条相交直线是水平的,就能确定该平面是水平平面。因此,只要将一个平面中的两条相交直线调水平,这个平面就水平了。
双层单点自动调整水平基准平台(参见基准平台结构示意图)就是据此原理设计的。通过调整一个点(Ⅰ)的高低使得A平面上一条直线(x轴线、x'轴线)达到水平,再调整另一个不同方向的点(Ⅱ),使得同一平面上的另一条与之垂直相交的直线(y轴线、y'轴线)达到水平,因为A平面上有两条相交直线达到水平,所以A平面就调整水平了。
为了得知平台与标准水平面的倾斜角度,采用双轴液体摆式水平传感器测量平台在x轴方向和y轴方向的倾斜角θx和θy,计算机系统将倾斜角与设定误差角δx、δy进行比较,依据比较结果判断基准平台A平面四个角的高低。由控制系统先控制升降机(Ⅰ)的上升或下降来调整B平面在x轴方向的倾斜角度,A平面在x轴方向的倾斜角随B平面调整,直到使x轴和x'轴达到水平状态。再控制升降机(Ⅱ)的上升或下降来调整A平面在y方向上的的倾斜角度,直到使y轴和y'轴达到水平状态。A平面达到水平,至此调平结束。
3 控制系统原理
式中:ρ——电解液的电阻率;Lx——上下电极间形成的液体电阻等效导电距离;Sx——上下电极间形成的液体电阻等效面积。

图3 双轴水平传感器结构图
当壳体水平时,顶部四个电极浸入在电解液中的深度相同,四个电极与电解液的接触面积相同,形成的四个电阻值相等,即Rx=R1=R2=R3=R4。当传感器倾斜时,液面因为重力保持水平,这时,电极浸入在电解液中的深度发生了变化,电极与电解液的接触面积也发生了变化,即Lx和Sx发生了变化,导致电极与电解液形成的电阻值Rx发生了变化。
将每个轴向的一对电极分别与两个精密电阻组成一桥路电路,如图4所示。
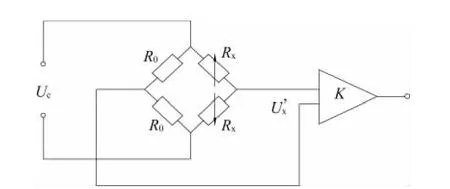
图4 桥路电路示意图
在公共电极和固定电阻的两端加上电压,当传感器水平时,气泡在中间位置,Rx=R0电桥平衡,输出电压U'x=0。当传感器倾斜时Rx发生了变化,此时Rx≠R0,电桥失去平衡,输出电压U'x≠0,输出电压的极性与传感器的倾斜方向有关,大小与倾斜角呈线性关系,dUx'=Kdθ,式中K为比例常数。据此可以确定平台的倾斜方向和倾斜多少,经计算机系统的比对判断,确定升降机的运行方向。
4 结语
在一个平面上将一个倾斜平面调整水平,一般需要在三点上共同调整才能实现。在研制双层单点自动调整水平基准平台中,从调平的基本原理入手,简化了问题的复杂性。将一个平面上两个方向的倾斜角,分解成两个层面上分别在x方向和y方向的单一方向倾斜角,通过每层只调整一个点就可以将上层倾斜平面调整至水平,实现在 2min内完成调平,水平精度优于2'。平台结构简单可靠,调平精度高、方法简便,适用于有较高水平精度要求的车载平台。
[1]季长路、张家钰.液体摆传感器及其特性[J].传感器技术,2001,20,(6).
[2]季长路,张家钰.激光基准信标仪的研制[J].安徽机电学院学报,2000,15(1):31-33.
[3]戴仁慈,李强生,胡嘉,等.电解液式倾斜传感器及其数据处理系统[J].应用科学学报,1989,7(4):341-343.
[4]翟羽健,倪江生.重型载体多点位自动调平技术[J].中国机械工程,1994,5(5).62-63.
[5]倪江生,翟羽健.雷达天线座车调平问题的研究[J].测控技术,1994,13(4):36-39.
[6]路杰,史雨辉.高精度自动化水平基准装置中微米级微位移平台的应用[J].大地测量与地球动力学,2011,31(2):145-148.
[7]孟士超,李彦征,刘伟,等.惯性平台姿态在高精度摇摆台上的标校方法[J].中国惯性技术学报,2009,17(2).
[8]许自富,阮安路,韩玮,等.激光型基准平台的研制[J].计测技术,2006(05).
[9]蒋有才,张彦斌,李皓,等.基准平台调平单元在线测试的研究[J].测试技术学报,2001(02).
[10]张增太.机动式雷达自动架撤系统的结构设计[J].雷达科学与技术,2004,2(6).
猜你喜欢
中国民间疗法(2021年5期)2021-06-09
河北理科教学研究(2020年2期)2020-09-11
机械工程与自动化(2020年4期)2020-08-25
中国特种设备安全(2019年4期)2019-05-20
好孩子画报(2019年10期)2019-01-10
中国特种设备安全(2018年10期)2018-12-18
电子测试(2018年14期)2018-09-26
森林工程(2018年4期)2018-08-04
北京航空航天大学学报(2017年1期)2017-11-24
航天工业管理(2017年4期)2017-05-12
