
电动汽车驱动系统与蓄电池充电一体化混合拓扑研究综述
2013-10-19 03:13漆文龙
电力自动化设备 2013年10期
刘 莹,王 辉,漆文龙
(山东大学 电气工程学院,山东 济南 250061)
0 引言
随着大气污染日益严重和能源危机不断加剧,世界各国都在采取各种措施应对随之而来的各种挑战[1]。电动汽车 EV(Electric Vehicle)作为一种首先发展起来的新能源汽车,蓄电池是制约其发展的关键因素[2]。蓄电池的各项指标在实际应用中都不够理想,还有更广阔的研究空间[3],而蓄电池的充电时间和使用寿命则与充电技术息息相关。因此,电动汽车蓄电池充电技术成为制约电动汽车发展的主要因素之一,受到了国内外学术界和工业界的重视。
一般而言,电动汽车充电系统可分为2种[4]。一种是车载型充电系统,包括充电变流器、蓄电池组、驱动变流器和电机。车载型充电系统适用于夜间连接到家用插座上,利用晚间用电低谷期富余的电力进行充电。另一种是独立型充电系统,包括位于车内的蓄电池组、驱动变流器、电机以及位于车外的独立型充电变流器。独立型充电系统,也称为地面充电装置,主要包括专用充电机、专用充电站、通用充电机、公共场所用充电站等,一般采用大电流快速充电,对充电技术方法和充电安全性的要求较高。
车载型充电系统因为用法简单方便而成为许多生产厂家和用户的首选,并且在充电站并未大规模普及使用的今天,也是工业界和学术界研究的重点。但是目前所研究的车载型充电系统普遍存在成本高、体积大、重量大、功率等级低并且对电网有不可忽略的谐波污染以及雨雪天气下充电安全性不足等问题[5-11],使得电动汽车无法与内燃机汽车相抗衡,阻碍了电动汽车的普及和推广。本文将介绍几种新型一体化混合拓扑结构,分析其工作原理及优、缺点,并分析一体化拓扑在未来发展中的重点和难点。
1 国内外研究现状
根据现有的应用成果[12-15],具有车载型充电系统的电动汽车其电机驱动系统和蓄电池充电装置并不同时工作(不考虑刹车时候的储能),即电动汽车运行时充电装置闲置,电动汽车充电时驱动系统静止。故一般车载型充电器含有的2个变流器不同时工作,一个整流器用于给蓄电池充电,一个逆变器用于驱动电机,而且变流器中一般会含有大电感和大电容。这种结构无疑增加了电动汽车的重量和成本,浪费了电动汽车内有限的空间。为此,在保证电动汽车蓄电池充电特性良好的基础上,国外一些学者提出研究电动汽车驱动系统与蓄电池充电一体化混合拓扑结构,即将牵引驱动系统的硬件结构重构成蓄电池充电装置,通过优化拓扑及控制策略控制变流器分别完成整流、逆变、功率因数校正,从而实现电机驱动、高功率因数充电、谐波治理等功能,扭转车载型充电系统在充电质量、体积重量和成本上的劣势。
随着研究的深入,国外研究人员已提出不同类型的拓扑结构用于实现车载型充电系统的功能,并对驱动与充电一体化混合拓扑结构进行了探索性的研究[16-23],如美国Gould公司的电子实验室研究中心早在20世纪80年代就在美国能源部的资助和NASA-Lewis研究中心的领导下研制出了用于电动客运车的第一代交流推进系统,并在此基础上不断改进;法国SOFRACI计划对一体化混合拓扑结构及其控制方法进行了相关研究;瑞典能源机构和混合动力电动汽车中心资助瑞典各大高校对基于特殊电机的一体化混合拓扑结构进行了研究;意大利都灵理工大学电气工程系对电动摩托车的充电系统进行一系列研究并提出了适用于电动摩托车的一体化混合拓扑结构;奥地利研究发展局与ARTEMIS JU签署了第100205号协议,支持电动汽车一体化双向车载型智能充电系统的研发。目前,国内针对驱动与充电一体化混合拓扑结构的研究基本处于空白状态,没有相关的研究成果发表。本文通过总结多篇国外相关文献,介绍一体化混合拓扑的结构,分析其原理及优缺点,讨论该技术的研究现状以及未来需要关注的研究方向,展望其未来发展前景。
2 一体化混合拓扑结构
一体化混合拓扑结构对已有的车载型充电系统做了2点改进:首先,该结构利用牵引系统与充电系统不同时工作的特点,将牵引系统中对电机进行驱动的逆变器结构重构成充电系统中对蓄电池组进行充电的整流器结构,减少了原系统中的元件数量,达到了优化体积、重量、成本的目的;其次,该结构将驱动电机中的电机绕组作为充电系统中的滤波电感使用,减小了由于使用大电感而占用的大量空间,同时对成本的降低起到了不可忽视的作用。
考虑到不同类型的驱动系统和应用条件,一体化混合拓扑也有不同结构,现总结如下。
2.1 使用继电器的一体化混合拓扑
在 1994年,AC 推进公司(AC Propulsion Inc.)申请了一种基于感应电机的电机驱动与电池充电一体化系统的专利,并将其用于汽车产业[24]。该专利的主要思想就是使用电机绕组作为充电系统的电感来重构变流器,使其工作在整功率因数状态。该一体化混合拓扑的结构图如图1所示,通过使用继电器K1、K2和K′2实现牵引模式和充电模式的转换。
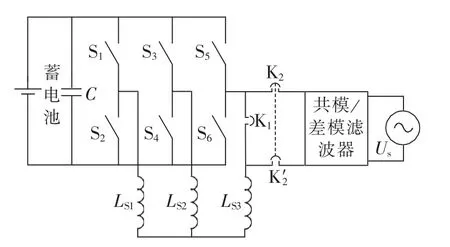
图1 使用继电器的一体化混合拓扑结构Fig.1 Integrated topology with relays
在牵引模式下,K2、K′2断开,K1闭合,形成一个经典的三相全桥驱动系统,通过选择合适的控制策略可实现对电机的驱动控制。
在单相交流电源充电模式下,图中所示的LS2和LS3是感应电动机一相绕组相对于中性点的漏感,在单相升压转换电路中作为滤波电感使用。为了保证整功率因数运行,蓄电池电压应该大于输入交流电压最大峰峰值。开关S1和S2断开,通过控制S3—S6的开通与关断,可利用LS2和LS3实现升压转换电路。另外,该专利还使用了共模/差模滤波器来消除输入侧电流纹波和尖峰。
但在三相交流电源充电模式下,该拓扑结构需要考虑电磁转矩问题,使得控制复杂化。
2.2 用于多电机驱动的一体化混合拓扑
文献[3] 和文献[12] 依旧采用了利用电机绕组作为充电电路滤波电感的思想,提出了一种适用于多电机驱动电动汽车一体化混合拓扑结构。该系统如图2所示,包括4个异步电机、4个三相逆变器、1个直流侧蓄电池组以及1个用于控制该电路在牵引模式和充电模式之间转换的转换开关。
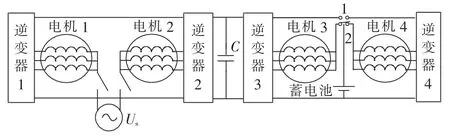
图2 四轮驱动电动汽车充电拓扑Fig.2 Topology of charging system for four-wheel EV
当电路工作在牵引模式,即转换开关位于位置1时,电机中性点悬空,蓄电池组通过4个逆变器分别驱动4个电机。当电路工作在充电模式,即转换开关位于位置2时,单相交流源连接到2个电机的中性点之间,调整与这2个电机相连的逆变器的控制方式,使逆变器的上桥臂开关同步、下桥臂开关同步,可以使电路重构成单相升压变换器且功率因数为1,其他2个逆变器和电机重构成2个降压变换器。图3所示为系统充电模式时的等效电路图,电机绕组在这里起到了滤波电感的作用。
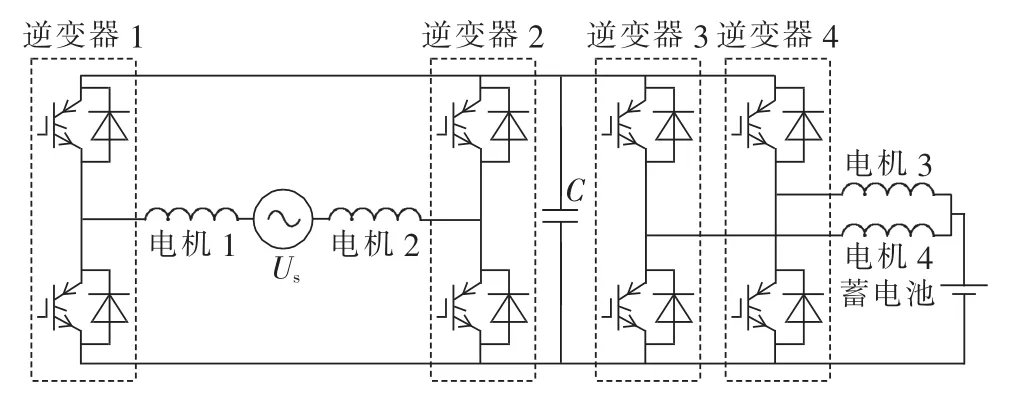
图3 充电模式时的等效电路图Fig.3 Equivalent circuit in charging mode
在充电模式时,每个电机绕组中所流过的电流均相等,故不存在电磁转矩。通过控制PWM升压变换器,可以保持直流母线电压不变。通过控制降压变换器,可选择合适的方式对蓄电池进行充电。
但是这种结构成本较高,并且只适用于四轮驱动的电动汽车,有很大的局限性。
2.3 具有功率因数校正的一体化混合拓扑
文献[25] 基于前几种拓扑结构做了改进,采用了单相充电系统。该系统包括1个三相H桥结构、1个电机以及1个控制拓扑工作模式的机械开关。
在充电模式下,使用一个机械开关将电机绕组连接到整流器上,VTa-、VTb-和VTc-同步开通与关断,将牵引模式下的逆变器变为DC/DC升压转换电路,如图4所示。此时,电机绕组作为3个并联的电感使用,因此通过电机的电流是单相的,故电机中不存在转矩,转子会保持静止。同时,该结构使用了功率变换器和LC滤波器,能够起到提高功率因数、降低谐波含量的作用。
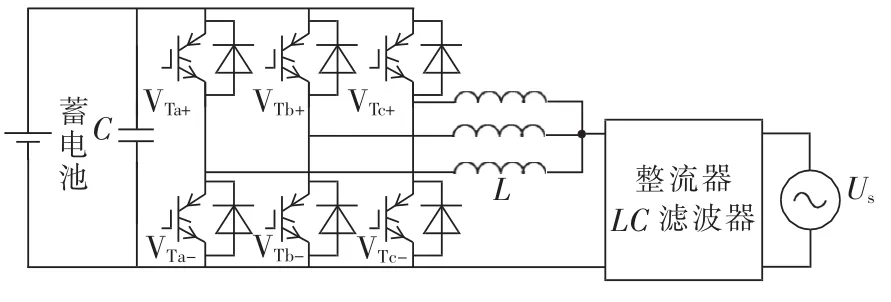
图4 充电模式下的电路图Fig.4 Circuit in charging mode
在牵引模式下,将机械开关断开,该结构将成为一个传统的三相逆变电路,通过选择合适的控制策略可实现对电机的驱动控制。但该混合拓扑仅适用于电动摩托车,功率等级比较低,并且充电时间比较长。
文献[26] 在上述具有功率因数校正的一体化混合拓扑的基础上进行改进,采用嵌入式永磁同步电机(IPM)的绕组电感作为滤波电感,在直流输出侧接入双向DC/DC变换器,能够将直流侧电压转换到需要的电压等级,从而灵活地对蓄电池进行充电。
2.4 具有隔离作用的一体化混合拓扑
文献[27] 提出了一种工业卡车专业的一体化混合拓扑。如图5所示,它包括同步感应电机、三相H桥、电容和蓄电池,并且具有隔离作用。
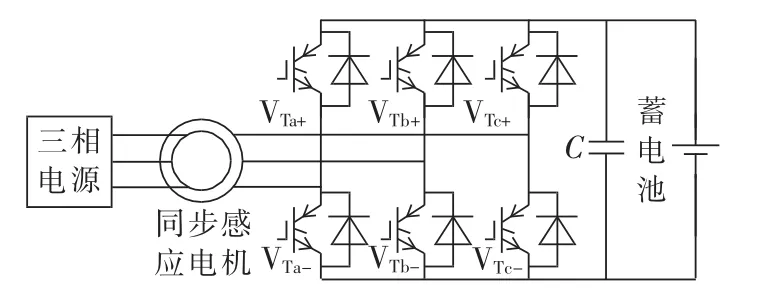
图5 工业用卡车充电模式下的电路图Fig.5 Circuit in charging mode for industrial trucks
在充电模式下,电机的绕线型转子连接到三相H桥侧,定子连接到电网,电机作为低频降压变压器使用,起到了隔离作用,提高了充电安全性。该系统中,功率能够双向流动,谐波扰动少,能达到整功率因数,且充电时转子保持静止。
在牵引模式下,变流器作为三相逆变器使用,文献[27] 采用空间矢量调制法对电机进行驱动控制。
但在该拓扑中,电机的气隙会造成较大的磁化电流,影响系统整体性能。绕制转子的成本、对接触器的需求和电机绕组对充电电压的适应都是不可避免的缺点。
2.5 PWM整流一体化混合拓扑
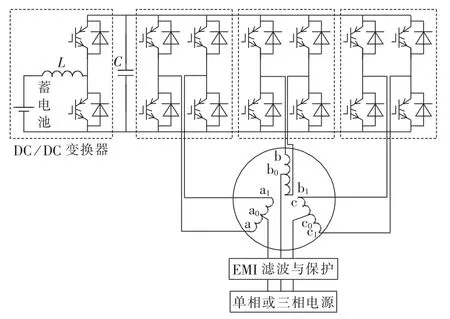
图6 系统拓扑结构Fig.6 Topology of charging system
这种充电系统的拓扑结构如图 6 所示[19,28-31],包括3个与电机绕组相连接的H桥、DC/DC变换器、蓄电池和电机。在充电模式下,变换器作为2个交叉并联的三相PWM升压变换器;在牵引模式下,变换器作为1个三相H桥逆变器。同时,该结构使用了EMI滤波器和保护装置,能够有效降低干扰,达到更好的充电效果。
在充电模式下,这种结构可以用于三相电源也可以用于单相电源。使用三相电源时,如图7所示,每个H桥的引脚都与电源相连。而使用单相电源进行充电时,图 7 中 VTc+、VTc-桥臂和 V′Tc+、V′Tc-桥臂的引脚以及绕组c0c、c0c1均不与单相电源相连,绕组a0a和b0b、a0a1和b0b1分别并联,然后与单相电源串联,整个电路等效为2个交互的PWM整流器,如图7所示。通过控制PWM变换器,中间直流环节电压保持在定值,可以通过控制交流电流波形得到要求的功率因数。该拓扑中,每个交流相都与2个并联的PWM升压变换器连接。这种连接是通过电机绕组的中点来实现的。给定相的半个绕组内的电流平衡,所以消除了定子产生的旋转磁场。因此,在充电时没有电磁转矩,电机保持静止。
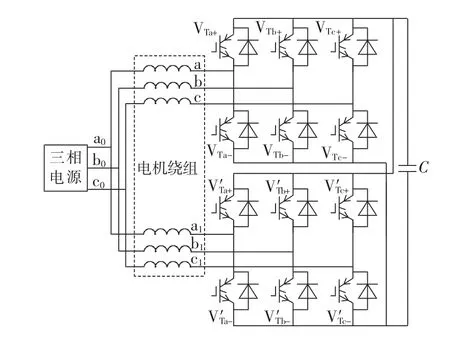
图7 充电模式下等效电路图Fig.7 Equivalent circuit in charging mode
在牵引模式下,绕组之间存在着互感,控制一个绕组中的电流会影响到其他绕组电流,这使得电机控制方法复杂化。对于这种结构的电机,绕组的电感、互感值与转子的位置有关。文献[28] 采用有限元模拟法,得出转子位置与电感值、互感值之间的数学关系表达式。但是,这种有限元模拟法只是得到了仿真验证,在实际应用中如何确定转子位置是一个值得深入探讨的问题。
2.6 改变电机结构的一体化混合拓扑
2.6.1 特殊嵌入式永磁同步电机
文献[32-33] 提出了一种特殊的嵌入式永磁同步电机(IPMSM),并在此技术上设计了一种整功率因数隔离型大功率三相双向一体化混合拓扑结构。这种电机的绕组结构很特殊,采用双定子绕组结构,不同于一般的电动汽车用电动机,如图8所示。在两极三相的IPMSM中,定子上有3个相移120电角度的绕组。假设每相绕组都分成了相等的两部分,并且绕着定子外围对称地移相,即定子里有6个绕组而不是3个。转子是两极结构,6个绕组分别相移60电角度。其他极对数的电机也可能有这种综合型充电拓扑。
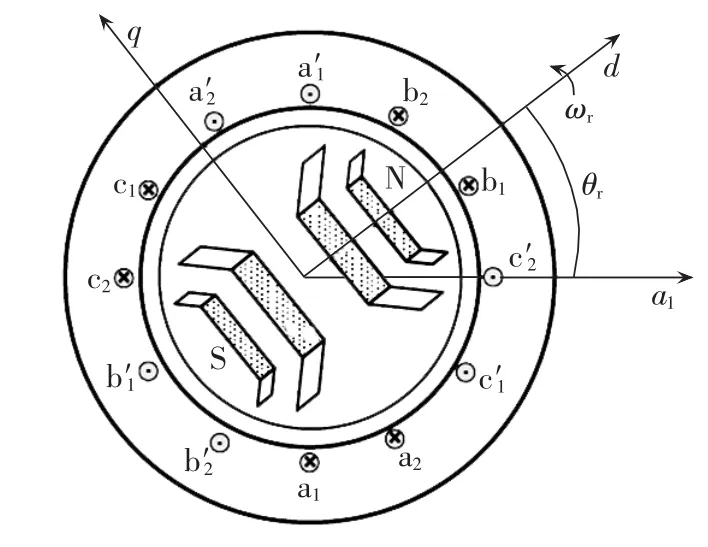
图8 双定子绕组结构截面图Fig.8 Cross section of IPMSM with split stator windings
图9为该结构在不同工作模式下的简化图。
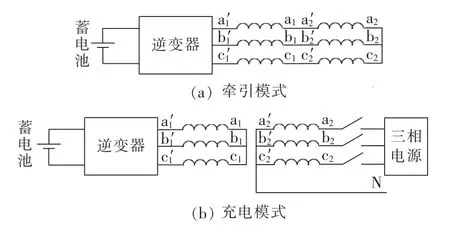
图9 系统工作模式简化图Fig.9 Simplified diagram of system operating modes
在牵引模式下,电路等效为典型的三相全桥逆变电路,通过选择合适的控制策略可实现对电机的驱动控制。
在充电模式下,电路等效为隔离型三相PWM整流电路,能够实现整功率因数充电,并且增强了充电系统的安全性。IPMSM进一步优化了充电器的体积和重量,并且三相PWM整流器的使用减少了谐波污染,提高了功率因数。
2.6.2 具有额外绕组的电机
文献[34] 提出了在定子中多加一个绕组的电机结构,从而实现电机驱动与充电一体化功能,如图10所示。
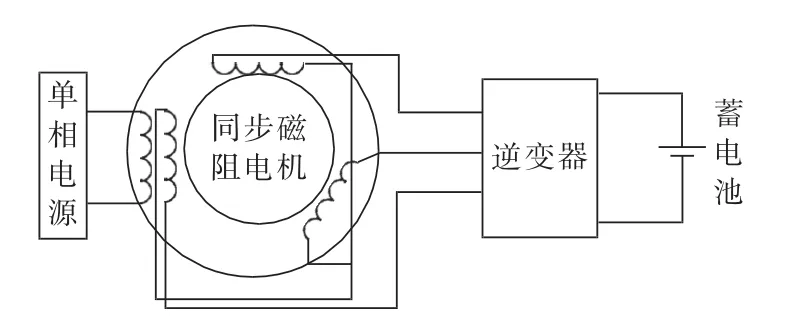
图10 基于具有额外绕组的同步磁阻电动机的单相充电系统Fig.10 Single-phase charging system based on SynRM with extra winding
显然,该电机的定子绕组是不对称的。图中采用了一种同步磁阻电动机(SynRM),作为一个固定的有气隙的变压器来使用,即在充电模式下电机不会旋转。当充电进行几个周期后,转子会自动对齐到绕组电感最大的位置。多加的绕组可以根据转换器的要求起到调整电压等级的作用。
这种方法对电机结构进行了改变,增加了电机绕组和控制方法的复杂性,绕组制造费用相应地也会有所提高。
2.7 具有再生制动功能的一体化混合拓扑
文献[35] 提出了一种具有再生制动能力的一体化拓扑结构,如图11所示。可以看出,该拓扑在电动汽车传统动力系统(即包括电机、逆变器、双向DC/DC电路、蓄电池的电机驱动系统)的基础上,增加了额外的二极管整流桥、1个小电容、2个开关以及1个机械开关S1,在充分利用原有电路的同时避免了大电感的使用。
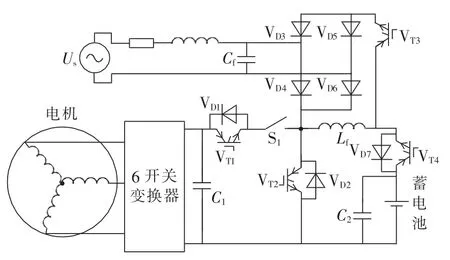
图11 具有再生制动功能的拓扑结构Fig.11 Topology with regeneration brake function
在充电模式下,机械开关S1断开,即机械开关左侧电路不工作。当开关管VT3导通,VT2、VT4关断时,电感在电源Us的作用下储存能量,同时,与蓄电池并联的电容对蓄电池进行充电。当VT3关断,VT2、VT4关断时,电感通过二极管VD2、VD7释放能量,对电容和蓄电池进行充电。这种充电电路综合了整流电路和升降压转换电路,具有功率因数校正功能。
在牵引模式下,机械开关S1闭合,VT4导通,VT2作为升压电路的主要开关。当VT2导通时,电感储存能量,电机的能量由直流侧电容C1通过逆变器来提供。当VT2关断时,电感产生一个高电压,对直流侧电容进行充电,同时通过逆变器向电机提供能量。
在再生制动模式下,机械开关S1闭合,VT2、VT4关断,VT1作为降压电路的主要开关。当VT1导通时,电感储存能量,同时电机制动产生的能量流向蓄电池和与之并联的电容。当VT1关断时,电感对蓄电池进行充电,与蓄电池并联的电容也向其释放能量。
但这种一体化拓扑只能采用单相电源供电方式,并且充电时不具有隔离作用。
3 一体化混合拓扑控制方法
针对不同拓扑在充电模式下的结构,学者们研究和应用了不同的方法来实现蓄电池充电控制,其中最常用的是 PID 控制[28,35-39]。但是,电动汽车驱动与蓄电池充电一体化混合拓扑是典型的非线性系统,因此PID控制器无法满足其多目标非线性的控制要求,下面总结了在此基础上应运而生的一些控制方法。
3.1 基于宏观能量表示法的控制方法
文献[19] 采用2.5节中所介绍的拓扑结构,使用多机理论和宏观能量表示法(EMR)对系统进行建模,综合描述电、机混合系统的特性。多机理论适用于研究多相驱动,尤其是混合动力电动汽车。EMR是一种基于能量流的图形建模方法,适用于综合描述电、机混合系统的特性,采用EMR所建模型的能量流动情况变得更加清晰、直观,更具条理性,有利于系统整体建模和控制的规范化,为研究复合储能系统的参数匹配与控制策略奠定了基础。
此种控制方法在多机理论和宏观能量表示法的基础上,定义了2个虚拟电机M0和M1:M1是主要的虚拟电机,等价于由帕克变换所定义的标准dq电机,因此它采用了与标准dq电机相同的控制方法;M0是零序虚拟电机,用于控制由3次谐波分量所激发的零序电量值产生的扰动,因此它需要一个特定的控制分支。通过比较有无M0平均电流的控制可以发现,在控制M0电流时能够得到更好的电流和转矩质量。另外,这种控制方法还提出了一种能够减少由电压调制所产生的共模电压的三级PWM法,以减少M0电流纹波。
3.2 基于极点配置法的控制方法
文献[29] 采用极点配置法(RST),设计了一种离散时间下的RST控制器用于控制2.5节中所介绍的PWM整流。RST以不定方程为基础,能够消除任意阶数多项式的低频干扰,并保证闭环系统的静态增益。该控制器能够达到响应速度和系统性能之间的最佳平衡,并确保参考量和控制输出量之间的稳态误差接近于零[40]。
RST控制完全不受电机绕组互感和电机绕组内阻值的影响,即使在互感和内阻值出现50%的波动时仍能得到良好的仿真结果。不过RST的电流控制有时延,但是在实际使用中可接受。另外在实际应用中,为了保护器件,控制器的输出经常饱和,因此需要加上饱和与抗饱和设备。
3.3 具有功率因数校正的交错控制法
文献[26] 中采用2.3节所介绍的一体化混合拓扑,在兼顾功率因数校正的同时应用交错控制完成充电算法。该方法将充电模式下升压转换器中的IPMSM绕组等效成四线共模模型与三线差模模型,采用相电流均衡计算和交错控制法,对这2种模型下的电流控制结果进行对比分析,发现共模模型下的控制效果最佳。
在共模模型中,转子各向异性对交错控制下的充电电流没有影响。采用交错控制法之后,输入/输出电流的调制频率为开关频率的3倍,电流波动明显减少,并提高了转换效率和动态控制。
4 一体化混合拓扑发展重点和难点
目前对电动汽车驱动与蓄电池充电一体化混合拓扑的研究还处于起步阶段,在其拓扑优化、控制技术等方面还有许多基本问题和关键共性问题值得去研究和探索,归纳如下。
a.驱动与充电一体化混合拓扑的设计,需充分利用驱动系统中已有的硬件结构(如电机线圈作为滤波电感或储能电感)重构成充电装置,保证在充电模式下电机的静止运行,避免电机磁化问题,实现定子和转子完全解耦,在完成基本充电功能的前提下,构建具有功率因数校正功能及谐波消除多目标优化的充电系统拓扑结构。
b.考虑到电动汽车在未来的推广和普及,电动汽车负荷将大幅度增长,电动汽车将作为分散式储能单元,成为智能电网的重要组成部分和电网削峰填谷的重要手段。电力电子变换器拓扑结构产生的谐波污染和低功率因数问题会对电网产生严重影响。而且电动汽车运行时经常处于频繁的启动、停车、加速、减速状态,其驱动控制系统亦要求驱动电机有良好的转矩、转速特性,并具有高的功率密度。因此,探索研究大功率高功率因数与谐波补偿优化拓扑结构势在必行。
c.一体化混合拓扑中对蓄电池充电时若采用PWM整流方式,则整流电路输出固有的2次谐波不可避免,这会影响蓄电池充电质量并缩短蓄电池使用寿命,而要消除低频谐波,一般需要在直流侧接上大电容或者LC滤波电路来消除低频纹波电压。如何在兼顾体积重量的基础上消除2次谐波污染或者合理利用此部分能量,亦是需研究的主要问题。
d.现有的大功率隔离型功率因数校正器大多在输入功率因数校正器级前加工频隔离变压器或者在功率因数校正器后加入一个高频隔离变压器。第1种方式简单,易于实现,但是电源系统笨重且代价高;第2种方式存在多级级联系统难以稳定等问题,并降低了系统的可靠性。因此,实现一种单级隔离型功率因数校正器,完成中大功率高功率因数蓄电池充电装置是未来发展趋势之一。
e.随着数字信号处理器的不断发展,其运算速度的加快和成本的降低,其用于控制电动汽车的电机驱动和蓄电池充电,将很大程度上简化控制电路,降低成本,利于工业化的实现。同时,控制系统应综合考虑电机驱动、高功率因数充电、谐波利用等控制目标,设计多目标控制策略。
f.目前的一体化混合拓扑大都是针对某一特定场合的需求进行设计的,而基于一种应用场合的设计思路很难应用于另一场合,设计的通用性不强,另一方面,由于没有统一理论作指导,要保证一体化混合后的电路仍能实现所需性能,设计人员必须深入理解电力电子电路,且具备丰富的设计经验,加上一体化后电路的工作机理较为复杂,这使得对变换器的分析变得困难。因此,如何总结一体化混合拓扑设计规律和分析方法从而设计出适用性强的拓扑是值得关注的问题之一。
g.目前对一体化混合拓扑的研究大多数还停留在理论分析、仿真验证的阶段,在分析仿真的基础上进行硬件实验研究是未来研究的重中之重。
总之,目前的探索性拓扑结构及控制策略很少综合考虑驱动与充电的结合与优化,需要进一步进行理论研究与系统分析,总结前人的研究思路,改进或研究新型拓扑。
5 结语
本文介绍了电动汽车驱动系统与蓄电池充电一体化混合拓扑的国内外研究现状,并举例分析了几种新型拓扑方案,指出了各自的优缺点,阐述了相关控制方法,最后展望了该领域今后的发展方向。作为一种新兴的电动汽车充电技术,电动汽车驱动系统与蓄电池高效充电一体化混合拓扑最大限度地优化了车载型充电器的充电质量、体积、重量和成本,具有非常光明的发展和应用前景,必将对电动汽车的发展做出重要贡献。
猜你喜欢
测控技术(2018年9期)2018-11-25
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
通信电源技术(2016年5期)2016-03-22
河北地质(2016年4期)2016-03-20
云南电力技术(2015年2期)2015-08-23
