
基于模拟定位电路的多峰值MPPT方法
2013-10-19 03:12葛俊杰赵争鸣袁立强胡仙来
电力自动化设备 2013年10期
葛俊杰,赵争鸣,袁立强,胡仙来
(清华大学 电机系 电力系统及发电设备安全控制和仿真国家重点实验室,北京 100084)
0 引言
近年来,我国的光伏发电产业不断发展,并逐步进入实用阶段,人们对光伏发电技术的研究也不断深入,取得了众多成果。其中光伏系统常规的单峰值最大功率点跟踪(MPPT)控制技术已经较成熟,如扰动观察法、导量增加法和模糊控制法等,都已经能取得较为满意的控制效果[1-3]。但当遇到局部遮荫或者不同特性的光伏组件组合等情况时,光伏阵列的输出功率会出现多峰值的现象[4-5],可能导致常规的MPPT方法陷入局部峰值点,而非全局最大功率点,所以多峰值情况下的MPPT方法也备受关注。
研究人员已经在多峰值的MPPT方法上做了不少研究。M.Miyatake等人提出了 Fibonacci搜索法[6-7],当其用于多峰值的MPPT控制时,通过变化搜索范围能准确地找到全局最优点,但其搜索速度较慢,不具有很大的实用性。T.Noguchi提出了短路电流脉冲法[8],利用光伏阵列的短路电流和最大功率点输出电流的比例关系来确定最大功率点,易于实现,具有实用性,但对后级电路影响大,功率曲线扫描时间长。K.Kobayashi等人提出了两阶段控制法[9],通过开路电压和短路电流来近似得到等效负载线,第1阶段找到等效负载线上最大功率点的邻域,第2阶段向最大功率点靠近,方法简单,控制灵活,但需要在线测量开路电压和短路电流。其他控制算法的应用在拓扑或复杂度上也受到了很大的限制[10-13]。
本文在分析光伏阵列的多峰值特性和动态特性的基础上,提出一种基于模拟定位电路的多峰值MPPT方法,先利用模拟电路的高速度在很短的时间内完成最大功率点的定位,再选择相应的控制算法迅速向最大功率点靠近和保持稳定。与传统的功率曲线扫描的方法相比,该方法并不需要使用高速的AD转换电路,对后级控制电路的扰动很小,并且对整个系统的工作效率的影响也非常小。仿真和实验的研究结果表明这种方法实现简单,稳定可靠。
1 光伏阵列的多峰值特性和动态特性
1.1 多峰值特性
光伏电池是一种能够吸收太阳光并将其转换为电能输出的半导体装置,一般情况下单个光伏电池元的静态等效电路如图1所示。

图1 静态等效电路Fig.1 Static equivalent circuit
相应的静态输出特性可以用式(1)表示:

其中,Iph是光生电流;Id是反向饱和电流;q是电子电荷;A是二极管品质因子;K是波尔兹曼常数;T是光伏电池的绝对温度;U是输出电压;Rs是光伏电池的串联电阻;I是输出电流;Rp是光伏电池的并联电 阻[14-15] 。
光伏电池的输出特性会受到温度和光照的影响,在不同的光照强度和环境温度下,光伏电池的输出特性是有差异的。当光伏电池通过串联和并联的方式构成光伏阵列,若其中部分电池被云、建筑物等阴影遮挡时,会使其光照和温度与其他部分出现不一致,输出特性也会不一样[16],从而导致整个光伏阵列的I-U曲线呈现多阶梯状,如图2(a)所示,其P-U曲线上也会出现多个峰值,即有局部极值点,如图 2(b)所示。
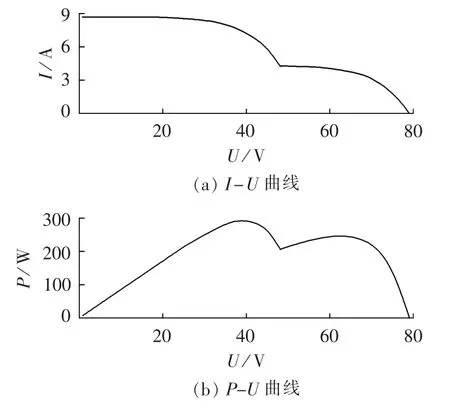
图2 阴影遮挡时的I-U和P-U曲线Fig.2 I-U and P-U curves in partially shaded condition
1.2 动态特性
当光伏阵列的输出突然变化时,需要考虑光伏阵列的动态输出特性,特别是其电容效应。光伏电池简单的动态等效电路如图3所示[17]。

图3 动态等效电路Fig.3 Dynamic equivalent circuit
这种动态等效电路与一般的静态等效电路的区别就在于多了一个并联等效电容Cp,相应地其动态输出特性可以用式(2)表示:
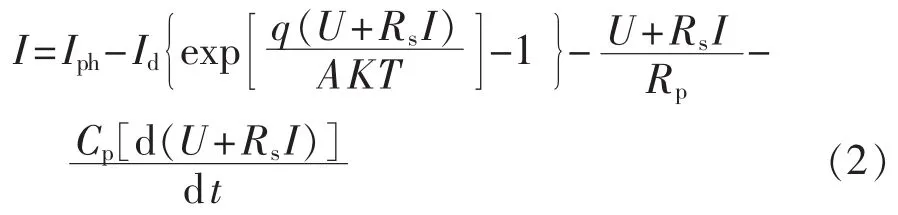
光伏阵列的动态等效电路的时间常数也可以用式(3)表示:

只要测量光伏阵列特性曲线所用的时间大于其时间常数,考虑动态特性时测量得到的光伏阵列的输出特性就基本是正确的[17]。
2 模拟定位电路的设计
利用光伏电池的动态特性,可以设计一种高速的模拟定位电路,以基于Buck电路的光伏系统为例,其结构如图4所示。图中,Z为线路等效阻抗。

图4 系统结构图Fig.4 System structure
主电路中的C1为测量辅助电容,S1和S2为测量控制开关,它们为其中的模拟定位电路提供全范围输出扫描。电容C2及以后的部分为Buck电路。
用于最大功率点定位的模拟定位电路主要由4个部分组成,如图5所示,它们分别是模拟乘法电路、峰值保持电路、比较触发电路和采样保持电路。
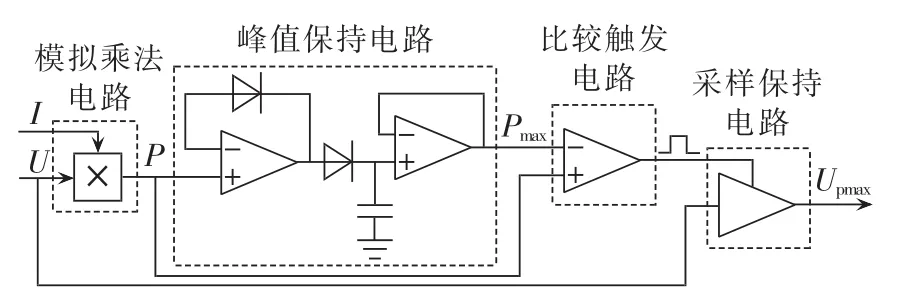
图5 模拟定位电路结构图Fig.5 Structure of analog locating circuit
模拟定位电路具体的工作原理如下:先将开关S2断开,此时光伏电池与后级电路及负载脱离,Buck变换器利用电容C2中存储的能量向负载供电。同时将开关S1导通,此时主电路的工作方式如图6(a)所示,电容C1和光伏电池被短路,电容C1放电,光伏电池的输出电压由原来的工作电压瞬间降为零。再立即断开开关S1,开关S2仍然为断开状态,此时主电路的工作方式如图6(b)所示,光伏电池开始向C1充电,光伏电池的输出电压上升到开路电压值,即光伏电池的输出被全程扫描一遍,扫描的时间由电容C1的大小决定,电容C1越小,扫描的时间越短,可以控制在数十微秒到数百微秒。在这个快速扫描过程中,光伏电池的输出电流和电压值被采样电路送到模拟定位电路,模拟乘法电路将相乘得到的功率值送给峰值保持电路和比较触发电路,比较触发电路再将实时功率值与峰值保持电路保持的之前的最大功率值进行比较,在更大功率值出现后,峰值保持电路更新保持值,比较触发电路则输出一个触发信号给采样保持电路,采样保持电路就会保存相应时间的光伏电池输出电压值,直到没有更大的功率值出现,最终控制器可以通过AD转换电路读取全局最大功率点的电压值。当模拟定位电路工作完成,控制器将开关S2导通,并开始主电路的调节,此时主电路的工作方式如图 6(c)所示,其中Z0为开关S2和线路中等效电阻和等效电感的和,能起到一定的限流作用,也可以考虑串入一个小电感。

图6 模拟定位电路工作模式Fig.6 Working modes of analog locating circuit
由于每次只需要在模拟定位电路工作完成后进行一次AD转换,获取最大功率点的光伏电池的输出电压值,而在定位过程中不需要转换,所以其转换频率不会高于常规MPPT的控制频率(几赫兹到几百赫兹),整个系统也就不需要高速的AD转换电路了。
在只有模拟定位电路工作时,即开关S2断开时,光伏电池没有给负载端供电,但每次模拟定位电路工作的时间很短,如100 μs,加上工作的频率很低,如100 ms工作一次,使得最终光伏电池脱离负载的时间比例可以小到 0.1%(100 μs/100 ms),所以对整个系统的工作效率的影响会非常小。
在开关S2断开的短暂时间内,电容C2会向负载供电,当开关S2导通时,被充电至光伏电池开路电压的电容C1中的部分能量会向电容C2中转移,但由于一般电容C2会比电容C1大得多,开关S2的导通也不会造成电容C2上电压大的波动,即对后级电路的扰动会很小。
3 多峰值MPPT的控制方法
当模拟定位电路完成定位,给出全局最大功率点对应的光伏电池输出电压值后,控制器就根据定位结果来设定参考值进行MPPT的调节。
基本的一次多峰值MPPT调节过程如下:先关断开关S2,导通开关S1,再断开开关S1后,等待C1充电结束,控制器读取定位电路输出,导通开关S2,最后采用常规算法控制开关S3迅速调节,使光伏电池输出为模拟定位电路输出值,控制其稳定在最大功率点附近,直到下一次多峰值MPPT调节。
在考虑模拟定位电路等的误差时,认为测量得到的值在最大功率点的一个小邻域内,可以采用传统的MPPT控制方法,如扰动观察法,在邻域中找到最终的最大功率点,并维持在其附近。此时由于已经在最大功率点的附近了,扰动观察法的扰动步长可以选择得足够小,以减少振动及损耗。
常见的多峰值MPPT的扫描控制方式一般有2种:一种是定周期地大范围扫描;另一种是当输出功率发生较大变化时,认为环境变化,才进行大范围扫描。前一种适用于外界环境变化缓慢的情况,不需要频繁动作,但不能立即对环境的变化做出反应;后一种适用于外界环境变化较剧烈时,可以很快对环境的变化做出反应,但可能时常动作。考虑到模拟定位电路可以频繁地动作,而且对后级控制电路的影响很小,这里推荐采用第2种扫描控制方式,只要环境发生一定变化就立即扫描。
综上所述,可以采用如图7所示的多峰值MPPT控制方式。
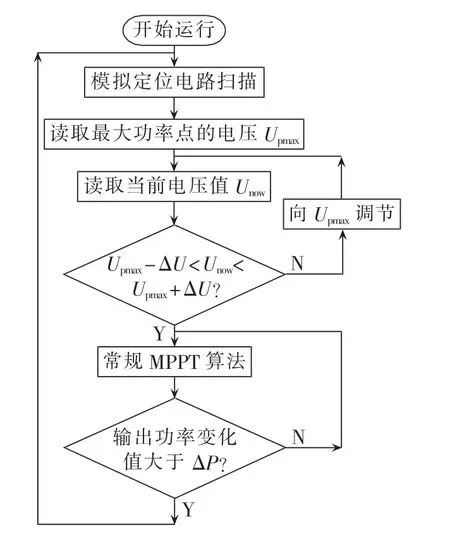
图7 多峰值MPPT控制流程图Fig.7 Flowchart of multi-peak MPPT control
当检测到前后输出功率的变化值超过一定值,开始控制开关S1和开关S2,进行最大功率点的定位,接着Buck电路快速将光伏电池的输出调整到最大功率点附近,再用常规的MPPT方法在小范围内追踪和维持最大功率输出,并继续监测实时输出功率的变化情况。
整个多峰值MPPT的控制中,对模拟定位电路的控制只是简单的规律动作2个开关管,输出调节也是常规的控制算法,因此几乎不会增加整体软件的复杂度。
4 仿真与实验分析
4.1 MATLAB仿真
在MATLAB下进行仿真,来说明这种方法的可行性,并进一步说明工作原理。多峰值的仿真结果如图8所示。图中,从上至下分别为开关S1的控制信号VS1、开关S2的反向控制信号VS2、光伏电池的输出功率P、光伏电池的输出电压U和模拟定位电路的输出信号Uout。
可见,在开关S2断开状态下,当开关S1导通时,光伏电池输出电压立即降到零,开关S1再断开后,光伏电池的输出电压逐渐升到开路电压Umax,而模拟定位电路都能够在电容充电的过程中找到全局最大功率点Pmax,并保留对应的光伏电池输出电压值Upmax。

图8 多峰值仿真结果Fig.8 Simulative results of multiple peaks
4.2 实验平台试验
本文提出的方法在一个为蓄电池充电的光伏实验平台上得到验证,其中主电路中与光伏电池直接并联的辅助测量电容C1为47 μF,在Buck电路前面的功率解耦电容C2为1000 μF。控制器采用TI公司的32位定点型DSP,型号为TMS320F2812。所采用的光伏阵列为2块光伏电池板串联构成,总功率为150 W,并且2块电池板运行多年,有着特性差异,适合本研究。
实验时环境温度为26℃,通过用黑布部分遮挡部分光伏电池板的光照来模拟部分遮荫,实现其输出特性的多峰值现象。
由于模拟定位电路的工作时间很短,需要考虑光伏电池的动态输出特性,这里先取不同大小的测量辅助电容C1来测试实验光伏电池板实际的动态输出特性。当电容值分别取 3300 μF、220 μF、100 μF和47 μF时,在部分遮荫条件下采用录波仪DL750测量计算的实验结果如图9所示,其中3300 μF时与静态特性基本一致。
可见在部分遮荫情况下,不同电容负载时光伏电池的输出特性曲线形状保持一致,只是幅值不一样,但基本是等比例变化的,即最大功率点对应的电压值是一样的。其中电容越大,幅值越大,这是因为考虑到光伏电池的输出电容时,负载电容越大,分流时流过的电流越大。
实验得到模拟定位电路的输出工作波形如图10所示,曲线P为其中模拟乘法器的输出,等效光伏电池板的输出功率,曲线U为模拟定位电路的定位电压输出。

图9 不同电容时部分遮荫的I-U和P-U曲线Fig.9 I-U and P-U curves in partially shadedcondition for different capacitances
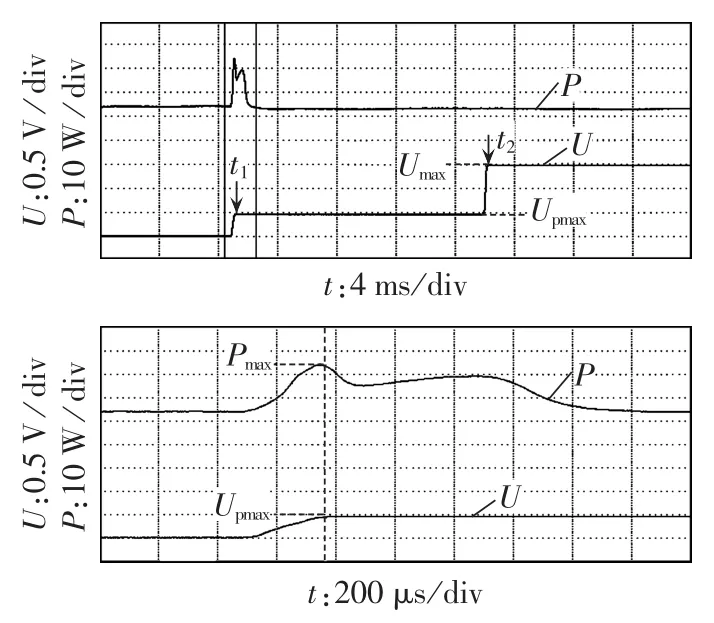
图10 多峰值实验波形Fig.10 Experimental results of multiple peaks
图10中上图显示在t1时刻模拟定位电路工作一次后,得到全局最大功率点对应的电压值Upmax,随后在t2时刻停止模拟定位电路,输出等效的光伏电池开路电压Umax。由图9可知光伏电池板的开路电压约为39 V,最大功率点对应的电压值约为13 V,即最大输出电压的近1/3,而图10中上半部分的实验结果得到的Upmax也确实为Umax的近1/3,这说明定位结果是正确和可靠的。图10中下图是上图矩形框部分的放大图,显示了模拟定位电路工作时的细节,可以明显看到,与仿真结果相一致,模拟定位电路的输出在工作时会找到并保持在全局最大功率点Pmax对应的电压值Upmax处。
当全局最大功率点被找到后,Buck电路就能迅速调节光伏电池输出,并采用小步长的扰动观察法保持稳定,具体调节情况与主电路及其负载特性都相关。
5 结论
本文提出了一种基于模拟定位电路的多峰值MPPT方法,将硬件模拟定位电路和软件数字控制算法相结合,来实现如部分遮荫情况下的多峰值的全局最大功率点的跟踪。在理论分析的基础上,搭建了实验平台,进行了仿真和实验,验证了该方法的可行性和可靠性。与传统的功率曲线扫描的方法相比,该方法并不需要使用高速的AD转换电路,对后级控制电路的扰动很小,并且对整个系统的工作效率的影响也非常小。总之,该方法以硬件模拟电路为基础,反应迅速,稳定可靠,特别适用于高可靠性要求的小容量光伏系统,如航天卫星的光伏电源等。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
电子制作(2018年19期)2018-11-14
电子制作(2017年7期)2017-06-05
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年24期)2016-04-12
中国光学(2015年5期)2015-12-09
现代电子技术(2014年10期)2014-07-19
振动、测试与诊断(2014年4期)2014-03-01
微特电机(2012年12期)2012-11-22
物理与工程(2010年6期)2010-03-25
