
具有建模误差补偿的三相逆变器模型预测控制算法
2013-10-19 08:33沈坤,章兢
电力自动化设备 2013年7期
沈 坤,章 兢
(湖南大学 电气与信息工程学院,湖南 长沙 410082)
0 引言
预测控制起源于20世纪70年代末的工业过程控制领域,因其具有鲁棒性及自适应性等特点[1],现已被广泛应用于变流器控制领域[2-16]。三相逆变器模型预测控制算法是一种将模型预测理论应用于三相逆变器控制的优化控制算法,它具有模型预测控制算法的一般特征,如基于预测模型、求解性能优化函数等[1]。当前最主要的2种三相逆变器模型预测控制算法是显式模型预测控制EMPC(Explicit Model Predictive Control)算法[4]及有限控制集模型预测控制 FCS-MPC(Finite Control Set Model Predictive Control)算法[5]。其中 FCS-MPC 算法具有易于理解、建模直观、控制直接、方便处理系统约束且无PWM调制器及参数调节[5]等优点,并且已成为三相逆变器模型预测控制研究的主要方向[5-16]。文献[5]阐述了FCS-MPC算法原理,并分析了三相逆变器FCS-MPC算法的特点及其与传统PI控制算法的区别;文献[6-7]则将三相逆变器 FCS-MPC 算法应用于三相电机的直接转矩控制;文献[8]首次采用FCS-MPC算法实现了三相逆变器的预测电流控制;文献[9]将三相逆变器FCS-MPC算法应用于三相UPS逆变器的输出电压控制;文献[10]讨论了三相逆变器FCS-MPC算法计算延时的补偿问题;文献[11]采用对瞬态与稳态分开控制的方法降低了在FCS-MPC算法控制下的三相逆变器开关频率;文献[12]采用多步预测的方法降低了FCS-MPC算法的保守性。对于FCS-MPC算法性能优化函数中权重系数的设计问题,文献[13]采用实验方法对权重系数进行设计,而文献[14]给出了无需权重系数的性能优化函数设计方法。此外,文献[15]采用FCS-MPC算法实现了三相中点箝位逆变器的优化控制;文献[16]采用FCS-MPC算法控制三相并联逆变器的输出电压,改善了三相逆变器并联系统的控制性能。上述文献均假设所构建的三相逆变器预测模型与实际系统一致,不考虑三相逆变器的建模误差。由此构建的预测模型缺乏三相逆变器的实际输出反馈。即传统的三相逆变器FCS-MPC算法无经典预测控制理论中的反馈校正机制[1],从而影响系统控制性能。
本文首先介绍了三相逆变器FCS-MPC算法的基本原理,给出了三相逆变器FCS-MPC算法的设计过程,分析了建模误差对三相逆变器FCS-MPC算法控制性能的影响;基于经典预测控制理论中的反馈校正机制,采用三相逆变器的实际输出值与其预测模型计算出的预测值的偏差对三相逆变器建模误差进行补偿;通过对比实验验证了所设计建模误差补偿算法的有效性。
1 三相逆变器FCS-MPC算法
1.1 基本原理
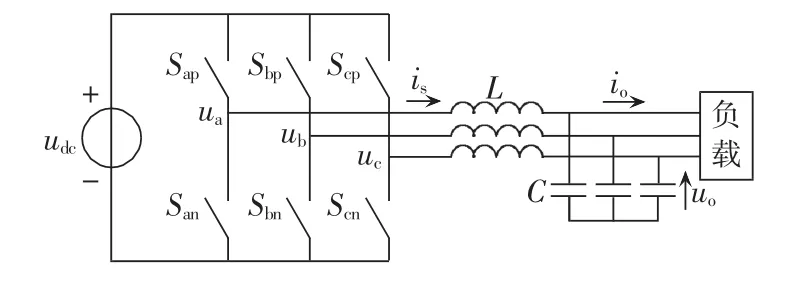
图1 两电平三相逆变器结构示意图Fig.1 Structure of two-level three-phase inverter
本文研究的三相逆变器为两电平三相电压型逆变器,其系统结构框图如图1所示。设定在任意时刻tk,作用在三相逆变器上的开关函数组合表示为向量 S=[Sa,Sb,Sc]T,其中开关函数 Sj=Sjp=S¯jn,且 Sjє{0,1},j=a,b,c。开关函数组合 S 只有 8 种可能值,设为 Si(i=0,1,…,7)。
针对图1所示的两电平三相电压型逆变器,文献[5]介绍了FCS-MPC算法。该算法基于三相逆变器开关函数组合(控制集)的个数有限(8个),从而可以通过由三相逆变器开关函数组合与其被控量之间关系构成的预测模型,采用遍历法的形式计算出在所有8个开关函数组合分别作用下的三相逆变器被控量预测值,并选择使所设计的系统性能优化函数最小的开关函数组合作用于三相逆变器[5,12]。
三相逆变器FCS-MPC系统的设计过程为:先根据三相逆变器被控量x与开关函数组合S的关系构建三相逆变器系统的预测模型fp{x,S};在 tk时刻,由被控量测量值x(tk)与该时刻实施的开关函数组合S(tk)(已在前一控制周期计算出),计算出 tk+1时刻被控量的预测值,即 xp(tk+1)=fp{x(tk),S(tk)};再由计算出的被控量tk+1时刻预测值xp(tk+1)与全部开关函数组合Si分别计算出tk+2时刻被控量的预测值,即 xpi(tk+2)=fp{xp(tk+1),Si},i=0,1,…,7;根据设定的控制目标,如三相逆变器被控量对其参考值的跟踪、开关功耗及系统约束等,构建系统的性能优化函数 fg{x*,xpi,Si},其中 x*为被控量参考值,并且认为其变化相对于系统采样时间而言是平缓的;在Si(i=0,1,…,7)中选择使性能优化函数fg最小即最优的开关函数组合在 tk+1时刻作用于三相逆变器系统[5,12]。两电平三相逆变器有限控制集模型预测控制系统结构框图[5]如图 2 所示。
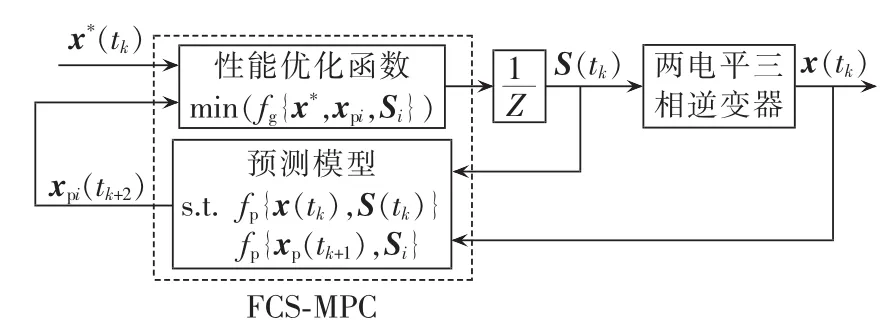
图2 三相逆变器FCS-MPC算法系统结构框图Fig.2 Structure of FCS-MPC scheme for three-phase inverter
根据上述算法描述,且设定三相逆变器的控制目标是被控量对其参考值的跟踪,可得出如图3所示的三相逆变器FCS-MPC算法原理图。图中点划线表示三相逆变器被控量参考值曲线,短虚线表示各时刻在所给最优开关函数组合作用下的被控量输出值,实线表示各时刻在三相逆变器全部8个开关函数组合分别作用下的被控量预测值。由FCS-MPC算法可知,图3中在tk时刻先由三相逆变器预测模型计算出被控量在tk+1时刻的预测值xp(tk+1),再利用预测模型分别计算出在三相逆变器全部8个开关函数组合分别作用下的系统被控制量在tk+2时刻的预测值 xpi(tk+2)(i=0,1,…,7),最后选择与被控量参考值曲线最接近的预测值所对应的开关函数组合在tk+1时刻作用于系统。由图3可知,系统tk+1时刻实施的开关函数组合为S3。
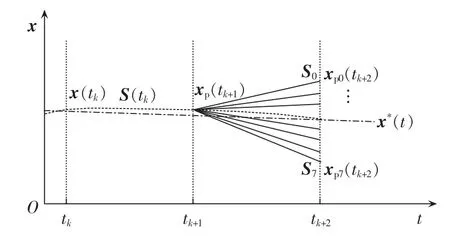
图3 三相逆变器FCS-MPC算法原理Fig.3 Principle of FCS-MPC scheme for three-phase inverter
1.2 两电平三相电压型逆变器FSC-MPC算法设计
文献[9]针对图1所示两电平三相电压型逆变器的输出电压跟踪问题,给出了两电平三相电压型逆变器FCS-MPC算法的设计方法,具体过程如下。
先构建两电平三相电压型逆变器的离散时间模型[9]:

由1.1节可知:

则由式(1)—(3)可得控制器预测模型为:

设三相逆变器输出电压的参考值为u*o,确定三相逆变器预测控制的性能优化函数为:

其中,u*oα、u*oβ分别为矢量 u*o的实部和虚部数值;uopiα、uopiβ分别为矢量uopi的实部和虚部数值。
1.3 系统建模误差对控制性能的影响分析
注意到在上述三相逆变器FCS-MPC算法构建过程中,总是假定三相逆变器被控量的实际测量值与由所构建的三相逆变器预测模型计算出的预测值是相等的,即认为所构建的三相逆变器预测模型与实际系统完全一致,忽略系统建模误差。而事实上建模误差在任一时刻及任一建模精度下均存在,且对系统控制性能的影响不可忽略。图4给出了考虑建模误差时,传统三相逆变器FCS-MPC算法的开关函数组合选优过程。同样设定三相逆变器的控制目标是被控量对其参考值的跟踪问题。图中长虚线表示被控量的参考值曲线,短虚线表示各时刻在由前一时刻选择的最优开关函数组合作用下的系统被控量预测值,点划线表示各时刻系统被控量测量值,实线表示各时刻在三相逆变器全部8个开关函数组合分别作用下的被控量预测值。
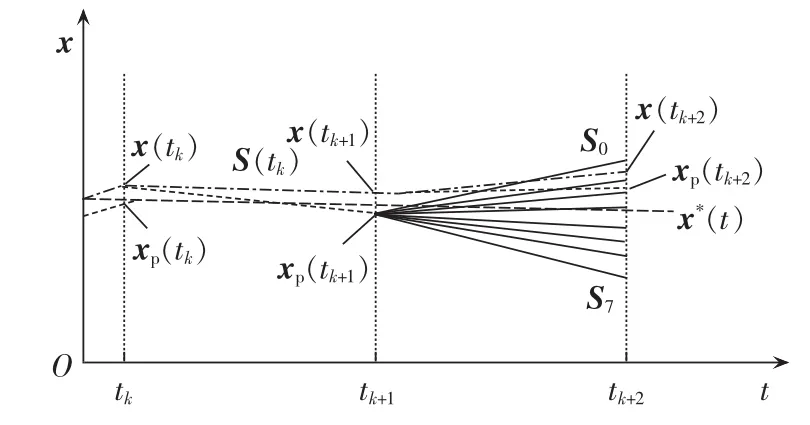
图4 建模误差影响下的三相逆变器FCS-MPC算法Fig.4 Influence of modeling error on FCS-MPC scheme for three-phase inverter
由图4可知,假设在tk时刻被控量的测量值x(tk)与tk-1时刻由三相逆变器预测模型计算出的预测值xp(tk)存在偏差,这将导致在tk时刻由tk-1时刻基于被控量预测值xp(tk)确定的最优开关函数组合S(tk),并未从点 xp(tk)作用于系统,而是从点 x(tk)作用于系统。此时对于三相逆变器控制系统而言,由tk-1时刻确定的tk时刻最优开关函数组合S(tk)可能已不再是最优。而在tk时刻,基于传统三相逆变器FCS-MPC 算法,先由 fp{x(tk),S(tk)}计算出被控量tk+1时刻预测值xp(tk+1),再根据该预测值计算出tk+2时刻被控量在全部8个开关函数组合分别作用下的预测值,选择最接近参考值的预测值对应的开关函数组合即为tk+1时刻的最优开关函数组合。按上述方法,图4中tk+1时刻将实施的最优开关函数组合为S3。同样由于存在建模误差,且假设在一个控制周期内系统是线性的(事实上该假设完全成立,因为依据FCS-MPC算法原理,系统在一个控制周期内没有开关动作,此时变流器系统是线性的),则在tk+1时刻由S3作用下的被控量响应曲线的起点将从点xp(tk+1)平移至x(tk+1),依此可得出在tk+1时刻由预测模型计算出的在S3作用下的被控量tk+2时刻预测值xp(tk+2)。由图可知,此时xp(tk+2)已远离参考值曲线,即在tk+1时刻对三相逆变器实施S3时,该控制量已失去了最优性。
综上所述,由于存在建模误差,使得遵循传统FCS-MPC算法选择的最优开关函数组合,在其实施于三相逆变器时已丧失了最优性,导致系统被控量实际响应曲线与由FCS-MPC算法确定的最优响应曲线出现偏差,最终影响系统的控制性能。
2 具有建模误差补偿的三相逆变器FCS-MPC算法
由理论分析可知传统三相逆变器FCS-MPC算法由于未考虑建模误差,使得系统控制性能受到影响。而在经典预测控制理论中,为避免建模误差对系统控制性能的影响,采用反馈校正的机制实现对预测模型建模误差的闭环校正,因此基于反馈校正的思想[1],本文提出了一种用前一时刻三相逆变器预测模型的建模误差补偿当前时刻预测模型输出值的具有建模误差补偿的 FCS-MPC,即 FCS-MPCMEC 算法,算法具体描述如下。
步骤1 在 tk时刻采样 x(tk),并已知 S(tk)(tk-1时刻计算结果),由预测模型 fp{x(tk),S(tk)},计算出被控量 tk+1时刻预测值 xp(tk+1)。
步骤2 已知 x(tk)、xcp(tk)(tk-1时刻补偿后的预测模型计算结果)、xp(tk+1)及补偿系数λ,其中补偿系数λ的计算公式为:

步骤4 求解性能优化函数 fg{x*,xpi(tk+2),Si(tk+1)}(i=0,1,…,7),选择可使得 fg最小的 imin,iminє{0,1,…,7},将其对应的开关函数组合Simin在tk+1时刻实施于系统。
根据上述三相逆变器FCS-MPCMEC算法描述,给出了如图5所示的FCS-MPCMEC算法原理图,其中图 5(a)为算法流程图,图 5(b)为三相逆变器 FCS-MPCMEC算法开关函数组合优选过程。在图5(b)中,考察被控量 x(t)对其参考值 x*(t)的跟踪问题。在tk时刻,三相逆变器被控量测量值x(tk)与tk-1时刻计算出的经补偿后的预测值xcp(tk)仍存在小偏差,而该时刻的最优开关函数组合S(tk)从点x(tk)作用于系统。依据FCS-MPCMEC算法,由预测模型计算出tk+1时刻的预测值xp(tk+1),再由补偿算法计算出tk+1时刻被控量预测值的补偿值 xcp(tk+1),并在 xcp(tk+1)基础上计算在全部8个开关函数组合分别作用下的tk+2时刻被控量的预测值,选择最接近参考值的预测值对应的开关函数组合在tk+1时刻作用于系统。在图 5(b)中S4被确定为最优开关函数组合,并在tk+1时刻作用于系统。
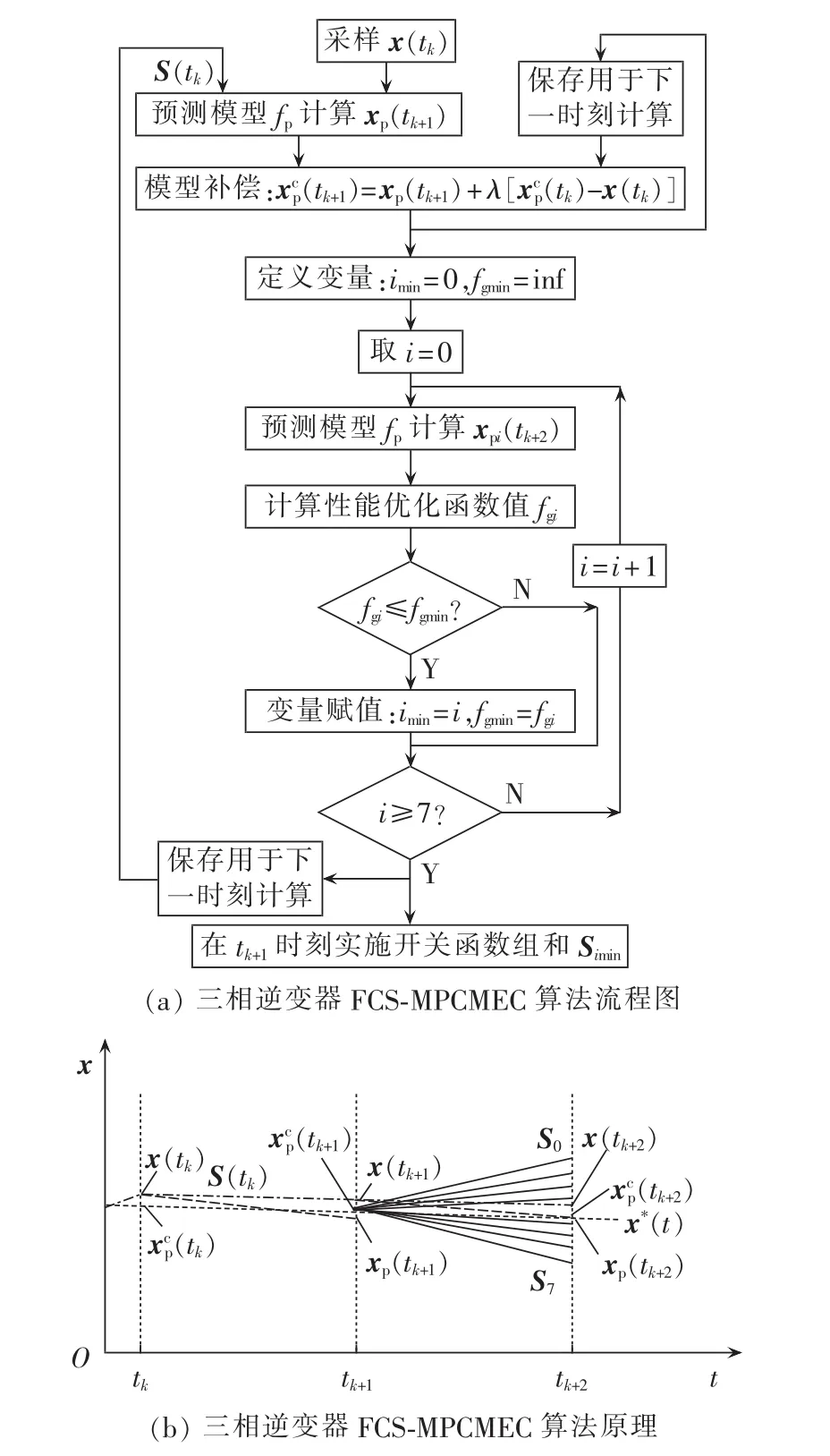
图5 三相逆变器FCS-MPCMEC算法Fig.5 FCS-MPCMEC scheme for three-phase inverter
3 实验
为验证上述三相逆变器FCS-MPCMEC算法的可行性及有效性,本文按图1所示主电路结构构建了两电平三相电压型逆变器实验系统,系统参数为:udc=520 V,L=2.4 mH,C=40 μF。在由 DSP6711D 及DSP2812组成的双DSP平台上实现了如图5所示的三相逆变器FCS-MPCMEC算法,控制器的参数为:Ts=33 μs,且将三相逆变器模型式(1)的系统矩阵 A中的参数rl赋值为0。即所构建的三相逆变器预测模型忽略了滤波电感及线路等效阻抗,同时也未考虑三相滤波电路电感、电容参数的变化,这是对三相逆变器的非精确建模。设定逆变器输出电压参考值为:频率50 Hz、峰值200 V三相对称电压。为验证三相逆变器FCS-MPCMEC算法对三相逆变器在多种负载工况下的控制性能,本文进行了三相逆变器在空载、带阻感性负载(有功功率P=15 kW,无功功率Q=2kVar)、带非线性负载(三相二极管不控制整流桥外接47 Ω与470 μF并联的阻容性负载)及负载投入(P=15 kW,Q=2kVar)等多种工况下的实验。同时为了对比分析,本文给出了不带补偿的三相逆变器FCS-MPC算法在上述负载工况下对三相逆变器控制的实验结果。
三相逆变器FCS-MPCMEC算法的实验波形如图6所示,作为对比的无补偿三相逆变器FCS-MPC算法的实验波形如图7所示。为便于分析及观察,本文仅给出三相逆变器A相输出电压以及输出电流波形。
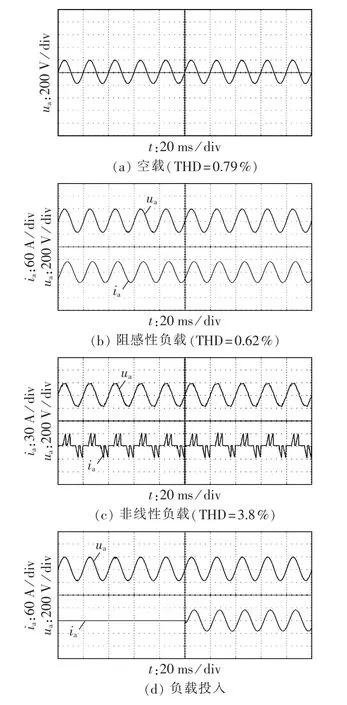
图6 三相逆变器FCS-MPCMEC算法实验波形Fig.6 Experimental waveforms of FCS-MPCMEC scheme for three-phase inverter
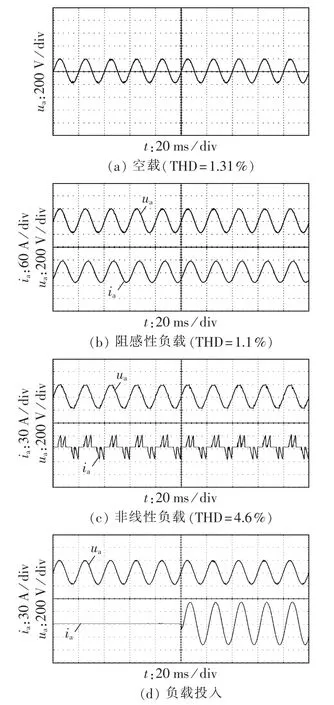
图7 三相逆变器FCS-MPC算法实验波形Fig.7 Experimental waveforms of FCS-MPC scheme for three-phase inverter
对比图6及图7可知:在三相逆变器空载运行时,基于FCS-MPCMEC算法的三相逆变器输出电压THD值比基于FCS-MPC算法的三相逆变器输出电压THD值减小了接近一半;在三相逆变器带阻感性负载时,FCS-MPCMEC算法对三相逆变器输出电压的控制效果也优于FCS-MPC算法,前者对应输出电压的THD值是后者对应输出电压THD值的一半。对于带非线性负载工况,算法对逆变器输出电压波形质量的改善效果不显著,图6(c)中在FCS-MPCMEC算法控制下三相逆变器输出电压THD值为3.8%,而对应图7(c)中由FCS-MPC算法控制下三相逆变器输出电压THD值为4.6%,但图6(c)中电流波形的毛刺明显比图7(c)少。对于负载投入工况,FCS-MPCMEC算法及FCS-MPC算法具有相似的动态响应速度,但基于稳态FCS-MPCMEC算法的逆变器输出电压波形质量比FCS-MPC算法好。
由此可知,FCS-MPCMEC算法改善了三相逆变器输出电压的波形质量,减少了输出电压的谐波含量,同时继承了FCS-MPC算法动态响应快的优点。这表明本文设计的FCS-MPCMEC算法对三相逆变器的控制是有效的和可行的,同时表明对于DSP平台,本文给出的FCS-MPCMEC是完全可以实现的。
4 结论
预测模型、滚动优化及反馈校正是预测控制的3个基本要素,上述三要素的紧密配合成就了预测控制的自适应性及鲁棒性等诸多优势。本文首先分析了传统三相逆变器FCS-MPC算法的原理,指出该算法缺乏对系统建模误差的考虑,并设计了一种采用三相逆变器实际输出量反馈校正预测模型输出值的FCS-MPCMEC算法,给出了该算法的原理及程序流程图,最后通过对比实验验证了该算法的有效性及可行性。
猜你喜欢
今日农业(2021年19期)2022-01-12
环境保护与循环经济(2021年7期)2021-11-02
防爆电机(2020年5期)2020-12-14
环球时报(2020-08-11)2020-08-11
哈尔滨铁道科技(2020年4期)2020-07-22
国外核新闻(2020年8期)2020-03-14
电子制作(2019年23期)2019-02-23
机电工程技术(2018年10期)2018-12-06
电测与仪表(2014年14期)2014-04-04
