基于Simulink的导弹攻防仿真应用研究
2013-10-17 03:19:08张刚
计算机与现代化 2013年1期
张 刚
(江苏建筑职业技术学院建筑设备工程学院,江苏 徐州 221116)
0 引言
导弹攻防对抗是一个非常复杂的动态过程,运算量极大,仿真时间长,而且现代导弹装备技术含量高、系统复杂、研制时间长、维护费用高,从武器型号的设计论证到作战使用都是十分复杂的系统工程,只能通过计算机仿真试验等成本低、效率高的技术手段来评估导弹系统的命中精度和突防效能。因此如何利用计算机仿真技术,通过建立和设计准确的数学模型,从技术和战术两方面加紧研究导弹攻防对抗系统,论证新式反导武器的性能,具有十分现实的军事意义。但是导弹模型复杂,信息交互量大,就导弹建模而言,采用传统的高级语言(如C++、Java等)建模,工作量极大且容易出错,不容易调试,而Simulink采用图形化、模块化的方式对复杂的动态系统进行建模,操作简单,避免了大量代码的编写,极大地方便了攻防导弹的建模工作[1],因此采用Simulink建立导弹六自由度仿真模型,同时在攻击导弹模型中添加反拦截控制模块,不仅可以验证攻击导弹的突防效能,而且验证了防御导弹的拦截能力,真正实现了攻防的对抗性。
1 导弹数学模型
导弹模型采用模块化方式建模,主要分为导引规律模块、控制系统模块、舵机系统模块和弹体运动模块[2]。导弹仿真模型[3]框图如图1 所示。

图1 导弹仿真模型框图
(1)弹体运动模块:由控制系统模块输出的舵偏角为驱动,输出导弹空间的位置信息和姿态信息。它包括作用在弹体上的力和力矩子模块、质心运动动力学方程子模块、绕质心转动的动力学方程子模块、质心运动的运动学方程子模块、绕质心转动的运动学方程子模块和过载计算子模块。
(2)导引规律模块:采用比例导引法根据弹目之间的位置解算出导弹相对目标的俯仰角、偏航角,导引头根据误差角,形成视线角速度信号。
(3)控制系统模块:由导引规律模块和弹体运动模块的输出驱动,根据俯仰通道、偏航通道、滚转通道的控制方程构建的模型求解出舵偏角参数。
(4)舵机系统模块:导弹舵机系统对控制命令信号进行限幅、限速,得到实际的控制信号。
1.1 导弹的弹体运动数学模型
(1)导弹质心运动的动力学方程。
由弹道坐标系所描述的质心运动的动力学方程组如式(1)所示。

(2)导弹绕质心转动的动力学方程。
选择弹体坐标系Ox1y1z1研究导弹绕质心运动的动力学问题。对于轴对称型导弹,导弹对弹体坐标系各轴的惯性积为零,弹体坐标系的各轴就是导弹的惯性主轴。导弹绕质心转动的动力学方程如式(2)所示。

(3)导弹质心的运动学方程。
根据弹道坐标系Ox2y2z2的定义可知,导弹的速度矢量与Ox2轴重合,利用弹道坐标系Ox2y2z2与地面直角坐标系Oxyz之间的变换矩阵或方向余弦表即可求得导弹质心相对于地面直角坐标系的位置方程,则导弹质心的运动学方程为:

(4)导弹绕质心转动的运动学方程。
建立描述导弹相对地面坐标系Oxyz姿态的运动学方程,就是建立姿态角对时间的导数与转动角速度之间的关系,描述导弹相对地面坐标系Oxyz姿态的运动学方程为:

式(4)中:x、y、z为导弹坐标;θ、ψc为弹道倾角和偏角。
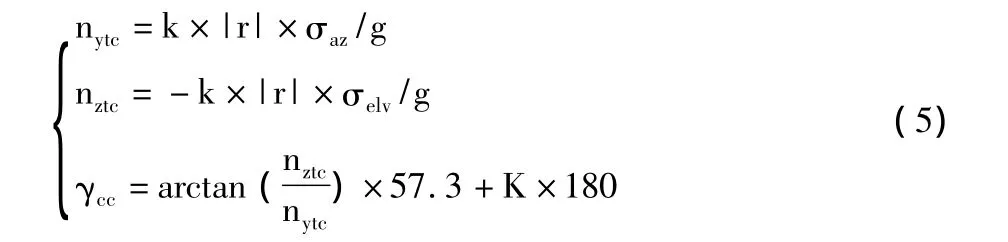
1.2 导弹的导引规律数学模型
导弹的导引规律采用比例导引法根据弹目之间的位置解算出导弹相对目标的俯仰角、偏航角,导引头根据误差角,形成视线角速度信号。数学模型如式(5)。
1.3 导弹的控制系统数学模型
导弹的控制系统由导引规律模块和弹体运动模块的输出驱动,根据俯仰通道、偏航通道、滚转通道的控制方程构建的模型求解出舵偏角参数。俯仰通道、偏航通道、滚转通道的控制方程如式(6)。

1.4 导弹的舵机系统数学模型
导弹舵机系统对控制命令信号进行限幅、限速,得到实际的控制信号。速率陀螺模型为二阶系统,传递函数如式(7)所示。

2 导弹仿真模型
2.1 攻击导弹Simulink模型
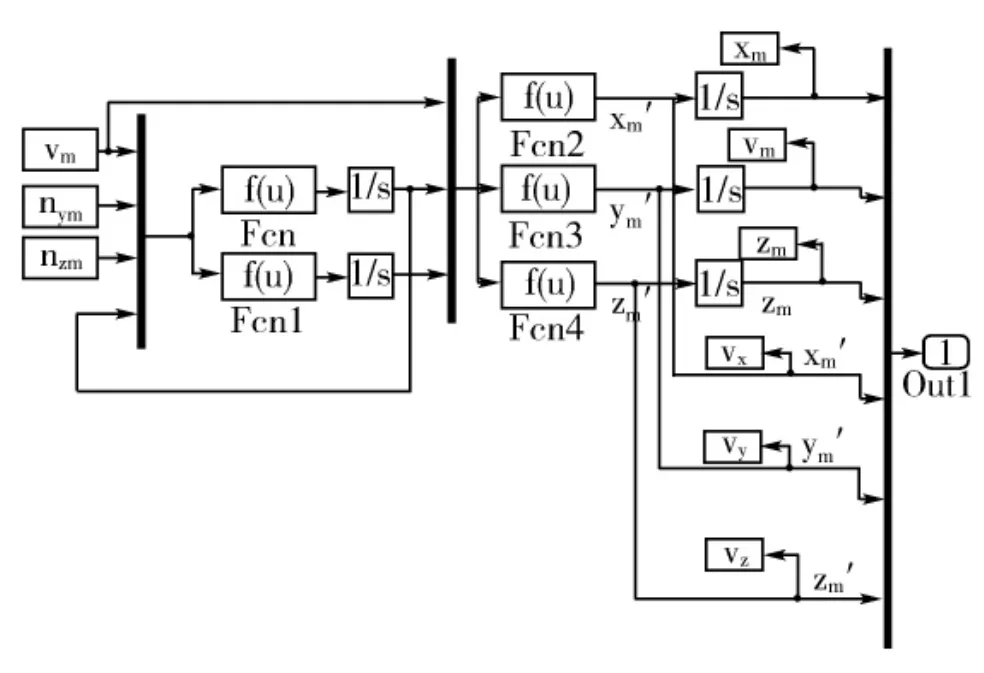
图2 攻击导弹Simulink模型
图2中vm、nym、nzm为导弹初始速度、初始y向过载和初始 z向过载,xm、ym、zm、vx、vy、vz为导弹模型输出位置坐标和速度坐标。
以上攻击导弹没有采取任何反拦截控制,可以在模型中采用机动变轨的方法来实现反拦截过程。机动变轨就是为了提高导弹的反拦截性能,改变导弹飞行的轨道,以有效突破敌方防御系统的拦截。仿真中攻击导弹在拦截导弹与其距离值小于一设定值时,改变弹道倾角与机动速度,此时因为拦截导弹的制导雷达搜索目标有一定的时间差,雷达搜索计算的导引位置仍是攻击导弹改变弹道前的导引位置,因此利用这段时间差,攻击导弹就有机会摆脱拦截导弹的追踪,从而达到反拦截的目的。
攻击导弹反拦截控制的设计机理为:当攻防导弹距离小于设定值400m时,弹道倾角控制量θ'和控制程序输出速度控制量v'与攻击导弹弹道计算模块的输出相加,方可得到攻击导弹实际弹道参数,此时攻击导弹弹道方向将脱离原方案弹道,v'、θ'和导弹反拦截之前的速度v与弹道倾角θ关系如式(8)所示。

当攻防导弹距离大于400m时,不做任何反拦截控制,则控制程序输出的控制量为0。反拦截控制程序流程和Simulink模型分别如图3、图4所示。

图3 反拦截控制程序流程

图4 反拦截控制Simulink模型
图4中r为攻防导弹距离,由外部模块输入,然后和反拦截临界值400作比较,确定速度和弹道倾角控制量的输出。
2.2 防御导弹Simulink模型
防御导弹采用模块化的方式,主要分为导引规律模块、控制系统模块、舵机系统模块和弹体运动模块。建立防御导弹Simulink模型如图5所示。

图5 导弹Simulink模型
3 导弹攻防仿真实例
采用Matlab 6.5对导弹攻防对抗过程进行了仿真,仿真效果如图6所示,图6为未采用反拦截控制和采用反拦截控制的攻防效果对比图,在攻防导弹距离400m时,攻击导弹改变弹道参数,躲避了拦截,反拦截成功;图7为攻防导弹之间距离图,更加形象地说明了导弹反拦截的效果。

图6 未采用和采用反拦截控制的效果对比图
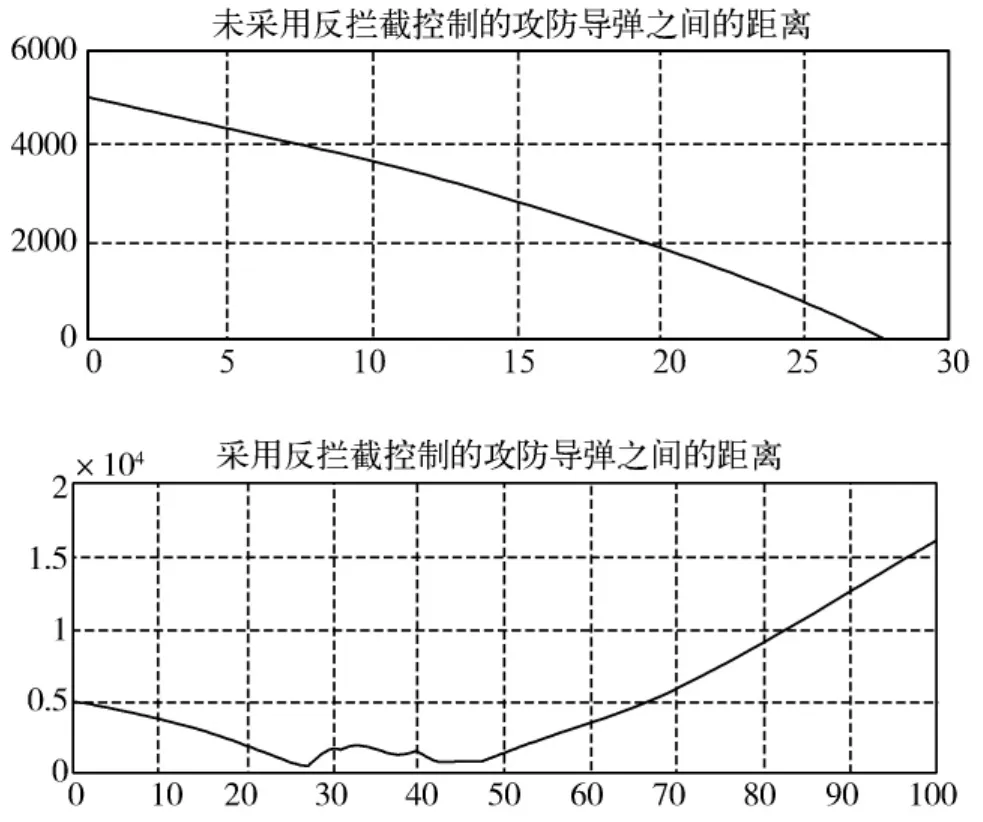
图7 攻防导弹之间距离对比图
4 结束语
导弹数学模型复杂且计算量大,采用Simulink工具对导弹进行建模,提高了建模效率,简化了建模工作。同时在攻击导弹模型中添加了反拦截控制模块,不仅可以验证攻击导弹的突防效能,而且验证了防御导弹的拦截能力,真正实现了攻防的对抗性,完成了分布式导弹攻防系统中数值仿真部分,为后续的视景仿真做准备。
[1]许涛,杨军,展建超.红外制导导弹最优导引律工程实现方法研究[J].计算机仿真,2010,27(2):96-100.
[2]杨满忠,尹健.空地导弹攻防对抗仿真系统研究[J].兵工学报,2007,28(5):576-580.
[3]赵文成,金学英,那岚.末制导段比例导引法的改进[J].指挥控制与仿真,2009,31(4):97-99,102.
[4]高建军.远程空空导弹制导与控制技术[J].制导与引信,2010,31(1):14-18.
[5]孙未蒙,刘湘洪,郑志强.多约束条件下的制导律研究综述[J].飞行力学,2010,28(2):1-5.
[6]项俊华,韩华亭.基于HLA的地面防空系统仿真研究[J].弹箭与制导学报,2005,25(3):419-421.
[7]王爱华,刘仁,郭桂志.基于HLA的防空反导作战仿真系统研究[J].微计算机信息,2009,25(16):197-198,208.
[8]王利芳,季晓光,夏群力.适用于攻击机动目标的制导律实现与仿真[J].电光与控制,2009,16(3):21-24.
[9]王文,王玉生,葛亮斌.基于HLA的防空群作战仿真系统设计[J].指挥控制与仿真,2009,31(3):80-83.
[10]汤阳春,张多林,张胜涛.基于HLA的空防对抗仿真系统概要设计[J].战术导弹技术,2006(2):93-96.
[11]赵锋,李盾,王雪松,等.导弹防御雷达仿真系统[J].系统仿真学报,2006,18(5):1190-1194.
[12]吴家铸,万敏,谢阳杰.常规导弹攻防对抗仿真系统研究与实现[J].计算机工程与科学,2008,30(3):100-102,138.
[13]王磊,方立恭,张晓东.基于AHP和功效函数的舰空导弹能力计算[J].指挥控制与仿真,2007,29(2):41-43,50.
[14]万敏,吴家铸.基于HLA的导弹攻防仿真系统的设计与实现[J].微计算机信息,2007,23(19):267-268,273.
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:18
汽车实用技术(2022年14期)2022-07-30 06:24:26
小哥白尼(趣味科学)(2022年3期)2022-06-09 03:22:48
爆炸与冲击(2022年2期)2022-03-17 07:28:44
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
电子制作(2019年7期)2019-04-25 13:17:48
上海煤气(2018年6期)2018-03-07 01:03:22
制导与引信(2016年3期)2016-03-20 16:02:02
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
航天器工程(2014年5期)2014-03-11 16:35:53