永磁同步电机制动能量回收系统的控制方法
2013-10-17 07:01卢智锋周世琼康龙云
电力自动化设备 2013年2期
卢智锋 ,李 军 ,周世琼 ,康龙云
(1.深圳市特种设备安全检验研究院,广东 深圳 518029;2.中山职业技术学院 机械工程系,广东 中山 528404;3.深圳信息职业技术学院交通与环境学院,广东 深圳 518029;4.华南理工大学 电力学院,广东 广州 510641)
0 引言
能源是社会长期稳定发展的关键因素之一。随着社会的不断进步,对能源的需求量也日益增大,使得能源枯竭日益严重。能源危机是当今各国所共同面临也是必须解决的难题之一。如何有效地解决能源枯竭的问题,各国已经展开了广泛而深入的探讨,普遍认为应提高能源的利用率和开发新的能源。当然,提高能源的利用率并不能阻止能源的枯竭,但可起到延缓作用,从技术上缓解能源紧张的问题。提高能源的利用率也即节能技术,可以降低能源的使用成本,与广大能源消耗者的切身利益密切相关。提高能源利用率的方法很多,能量回收是其中之一。能量回收是通过回收系统中剩余的(多余的)或制动时产生的能量,以达到节约能源的目的。
随着电能大规模的应用,全球大多数电能都是通过电动机实现能量的转换。目前,永磁电机驱动系统已经大量使用,而且这种情况将会持续下去[1]。电动机在制动过程中,特别是在频繁制动的场合,如日常使用的电梯、电动车等的电机系统,往往会浪费大量的能源。通过回收制动能量产生电磁制动转矩代替传统的机械制动,实现减速,是非常有必要的[2-5]。对制动能量进行回收,一方面可以节约能源,另一方面也可以作为电机的辅助制动,更好地保护制动器,并使制动更加平稳简单。
现在已有大量研究通过DC/DC逆变器实现制动能量回收的文献[6-10]。本文通过AC/DC逆变器实现制动能量[11-13]回收,采用基于矢量控制的铅酸蓄电池-永磁同步电机系统,通过制定相应的回收控制策略,利用逆变器对电动机制动时产生的交流电流进行整流,对蓄电池进行充电。本文首先介绍了制动能量回收系统的构成及系统的控制技术——电机系统采用矢量控制技术,逆变器采用正弦脉冲宽度调制(SPWM)技术;然后对能量回收系统的影响因素进行分析,制定控制策略;最后给出相应试验测试数据并进行分析。
1 能量回收系统构成
永磁同步电机常采用磁场定向控制策略[14-15]。图1(a)和图1(b)分别为系统在驱动和制动2种状态下的能量流向图。直流电流以蓄电池对外做功为正,蓄电池吸收能量为负,即图1(a)中直流电流为正,图1(b)中直流电流为负。此外,从图1中可以看出,系统在驱动和制动2个过程中,都使用了逆变器和位置传感器。逆变器的作用为:驱动时通过逆变器驱动模块控制功率器件的导通和关断,将直流电流逆变为交流电流(DC/AC),向电动机提供能量;制动时电动机作为发电机产生交流电流,通过逆变器整流(AC/DC)后,向蓄电池输入直流电流,实现制动能量回收。位置传感器的作用是检测永磁电机磁极位置的实时信号。
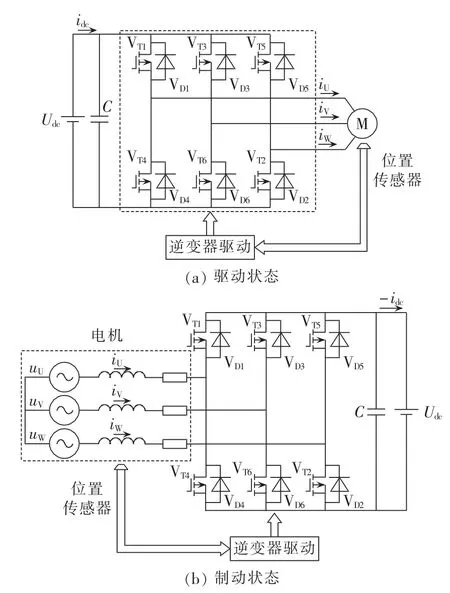
图1 电机控制系统框图Fig.1 Block diagram of motor control system
1.1 永磁电机的矢量控制
永磁电机的矢量控制原理和交流电机的类似。交流电机矢量控制的思想是将三相定子坐标转换为两相定子坐标,然后再转换为同步旋转坐标。产生相同的旋转磁场的情况下,同步旋转坐标系中电流为直流,即实现了交流电机的解耦[16]。坐标变换和逆变换分别如式(1)、(2)所示:

由于永磁电机是采用永磁体作为励磁磁场的,空间矢量关系如图2所示,因此不需要向电机提供励磁电流,即d轴电流为0,通常称之为id=0的控制,但其矢量控制需要时刻检测磁极所在的位置。通过位置传感器检测磁极的位置信号,然后进行空间坐标变换,可得到直、交轴(d、q轴)的电流,变换和逆变换公式分别如式(3)、(4)所示:

其中,θr=ωt+θ,θ为t=0时刻d轴和A轴的夹角。

图2 dq轴的空间矢量Fig.2 Space vector of dq axis
从式(3)和(4)中可以看出q轴的电流是电机控制的关键,只要通过控制iq的大小即可制定三相电流的幅值,而通过位置传感器可以获得三相电流的相角关系,因此整个控制系统可以简化为只要实施对iq的控制即可实现电机转速以及转矩的控制。
1.2 SPWM技术
本电机系统的逆变器采用三相全桥电路,如图3所示,通过SPWM技术控制逆变器,使其按设定值进行输出/输入。SPWM采用标准正弦作为PWM的调制波,是目前应用最为广泛的逆变控制技术[17]。

图3 三相全桥逆变电路Fig.3 Circuit of three-phase full-bridge inverter
通过霍尔位置传感器检测获得磁极的实时位置,并设定预期的三相电流作为调制波,以标准的三角波作为载波,制定功率器件的通断状态,使逆变器按预期的目标工作。SPWM的工作原理如图4所示。调制波处于载波上方时,同一桥上的上半桥功率器件导通而处于下半桥的功率器件关断;调制波处于载波下方时,同一桥上的上半桥功率器件关断而下半桥功率器件导通。因此,在同一载波中输入三相正弦的调制波,可以控制三相全桥逆变器功率器件的导通与关断,从而可输出类似调制波的三相电流波形。三相电流可由式(4)计算得到。

图4 SPWM工作原理Fig.4 Schematic diagram of SPWM
2 能量的回收
由图1(a)可见,电机系统的能量是通过蓄电池到逆变器再到永磁电机。电机处于制动状态时,如何按图1(b)所示控制逆变器进行整流,使能量从永磁电机通过逆变器(充电器)回收到蓄电池是本文重点。
2.1 能量回收的控制
在驱动过程中,矢量控制是通过设定iq的参考值控制功率器件,从而输出实际的三相电流,而制动时能量的流向是驱动过程的反方向。因此,制动时可采取类似于驱动的控制策略:设定参考值-iq,根据矢量控制原理得到三相电流的参考值,以其作为SPWM的调制波控制功率器件的导通与关断,最后向蓄电池输出实际的直流电流,实现对蓄电池的充电。制动过程中的三相电流参考值可以通过式(5)获得。

2.2 影响-iq的因素
a.制动减速度。引入制动能量回收系统后,制动的实施(系统自身的阻力除外)由机械制动和电磁制动组成。设定的过大,则电磁制动增大而机械制动作用不变,制动的减速度也相应增大,易出现急刹车的情况,降低电机系统的舒适性。
b.蓄电池充电特性。充电时,应尽量避免因充电电流过大或充电时间过长而损坏电池。在实际的制动过程中由于充电时间通常较短,因此主要考虑充电电流的大小对电池的影响。
c.逆变器在充电过程中的功耗。电机的制动能量通过逆变器对电池充电,如果设定的偏小,产生的制动能量不足以抵消逆变器的功耗,不但起不到充电的作用,还增加了逆变器的工作负荷,影响逆变器的寿命。
2.3 |-iq|的设定
-iq计算公式见式(6):

图6 iq与制动时间t的关系Fig.6 Relationship between iqand t
2.4 影响回收量的其他因素
制动能量的回收量是能量回收系统的重要指标,它反映了系统的实际价值以及存在的意义。除了制动次数和系统自身设定外,还有其他影响因素。
a.制动紧急程度。不同的制动程度回收的制动量不同。制动紧急程度一般分为轻微制动、中度制动、紧急制动3种。3种情况的机械制动的作用程度不同,使得制动时间不同。回收量则电磁制动力度不变的条件下,制动时间越长,回收得到的能量越多。
b.蓄电池的放电深度,主要表现为电池侧的电压变化。在相同的速度v下实施制动(机械制动作用相同时),电动机产生的等效反电动势U0相等。忽略电枢的自感L,逆变器的输出侧电压Uout=U0-Unidcrm,蓄电池侧电压 Uin=Udc+idcri。因为 Uout=Uin,所以 idc=(U0-Un-Udc)/(rm+ri)。其中,Un为逆变器压降;rm为等效的电枢绕组电阻;ri为蓄电池内阻;idc为回收的直流电流值。因此,当Udc较大时,回收的直流电流值idc较小,从而在相同的制动时间内回收量也较少。
3 试验及结果分析
以搭载了该铅酸蓄电池和永磁同步电机的二轮电动车作路面的行驶试验。永磁电机额定电压为48 V,额定功率为 2.2 kW,最高转速达 1000 r/min;采用的动力电池为铅酸蓄电池,额定电压为48 V,总容量为48 A·h;数据的采样频率为10 Hz。
图7为部分能量回收试验的结果。图7(a)是制动时电动车行驶速度与直流电流、电压的对应关系。图7(b)是在相同的机械制动作用下,采用不同回收电流(14.4 A和19.2 A)与制动时间对应关系,采用19.2 A(即idc1)回收电流时,速度下降更快,制动时间更短。图7(c)是相同的机械制动作用下,不同放电深度时完成一次制动能量回收时的能量回收量的对比。分别计算2次制动的回收量,放电深度大即蓄电池电压较低(Udc1)时,回收量为 39.96 mA·h;放电深度小即蓄电池电压较高(Udc2)时,回收量为32.45 mA·h。
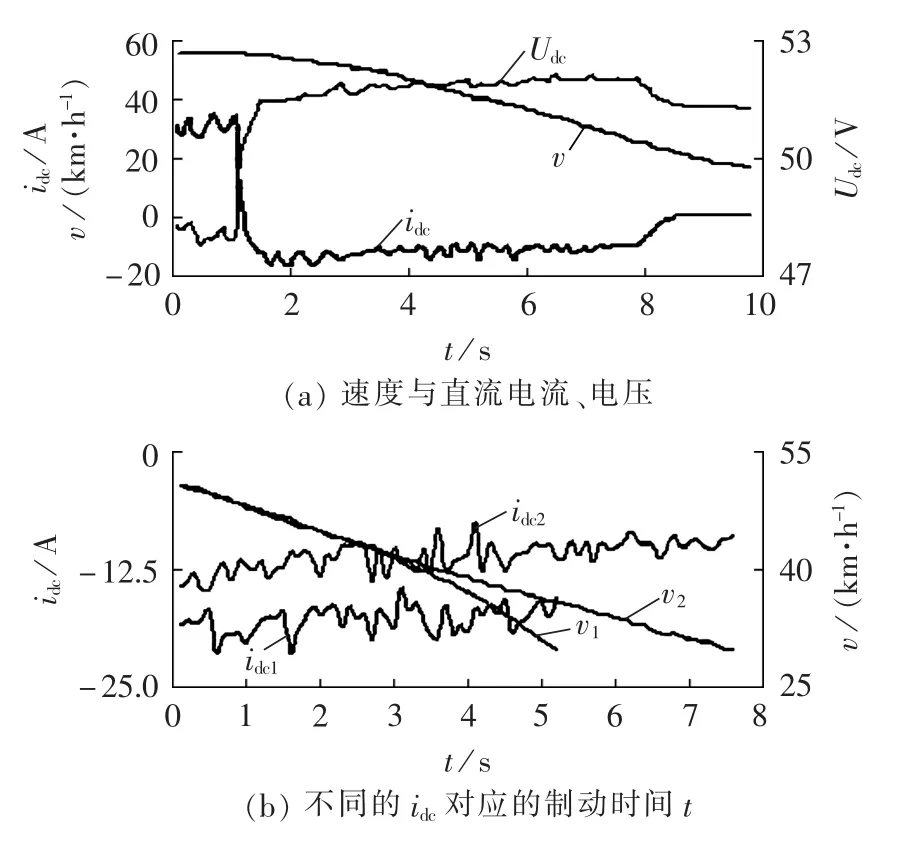
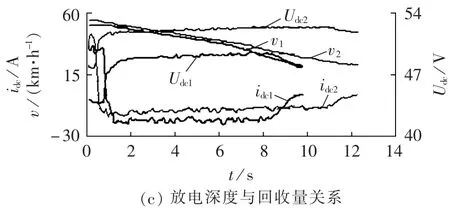
图7 实验结果Fig.7 Experimental results
在相同路段、相同制动次数及电池满充一次放电的情况下,进行制动能量不回收和回收行驶试验。不回收时,放电量为31.53 A·h,放电深度为65.7%,持续里程为42.36 km;回收时,回收系统设定以19.2 A作为最大可回收的直流电流。整个过程放电量为33.29 A·h,制动能量回收为 -2.59 A·h,占放电量的7.8%,持续里程为45.20km,持续里程增加了2.84km。
4 结论
根据试验的结果可以得出:
a.采用-iq控制逆变器整流实行制动能量回收的控制策略,方法简单有效,具有很好的实用价值;
b.根据制停距离和电池充电特性,设计出合适的回收电流,回收制动的能量;
c.根据电池放电深度对制动能量回收量的影响,可设定不同的制动策略,在不同的放电深度下调节电磁制动在制动过程中所占的比例。
猜你喜欢
微电机(2022年1期)2022-03-21
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
客车技术与研究(2015年3期)2015-08-24
电测与仪表(2014年21期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01