
舰艇战术对抗视景仿真技术研究*
2013-10-16 08:06刘喜作梁德清
舰船电子工程 2013年11期
刘喜作 梁德清
(1.大连理工大学 大连 116024)(2.大连舰艇学院 大连 116018)
1 引言
交互式舰艇战术对抗仿真训练系统脱离不了所处的战场环境,只有做到训练的战场环境与实战环境相一致,才能满足人员训练和武器装备作战使用评估的需要,以达到装备与人最佳结合的效果。但目前舰艇部队训练往往将战场三维可视化环境弱化,实际的实验演练环境与实战的战场环境无法直观地对应,这种实验演练模式在训练指挥员的指挥流程和操作手的操作流程是有帮助的,但因为它无法提供真正实战环境中视觉的逼真性,目标的出现突然性与复杂性,打击效果的直观性,而使指挥员无法有效提高应急指挥能力,操作手无法有效提高识别目标和精确打击目标的操作能力,直接影响训练效果和战斗力的提高。
构建舰艇战术对抗视景仿真平台,为战术对抗仿真训练系统提供丰富直观形象的三维可视化作战环境信息,增加训练沉浸感,使得指挥和训练人员对战场态势的把握更加准确,决策形成更加迅速,可极大提高态势分析过程的实时性、交互性和动态性,为指挥决策提供了强有力的支撑。该仿真平台作为作战环境的映像,目的不仅仅在于虚拟时空的表达与推演,更多地在于用虚拟海战场环境去模拟、实验、挖掘现实世界中的行为与事件[1~2]。
本文就舰艇战术对抗训练视景仿真中的几个难点技术,如自然环境仿真,目标实体三维可视化和战场特效分别予以论述。
2 自然环境仿真
自然环境仿真包括地形(港口与岛屿)仿真、海面仿真和天空仿真,它确立了仿真空间的位置关系和战场环境仿真的基础表达,是整个视景仿真绘制的重点[3~4]。
2.1 港口和岛屿显示模型设计
基于地理信息的虚拟海洋环境的港口和岛屿地形建模要与现实世界一一对应,其建模数据必须来源于实际的测绘结果。本文基于电子海图源数据,采用Global Mapper软件提取海图高程信息,高程信息主要包括岸线、等高线、等深线、水深点等[5]。在数据处理过程中,利用GDEM(Global Digital Elevation Model)高程数据对海图高程数据缺失部分,例如桥梁、码头和山丘等进行补充,但要保证生成的数据与原海图一致。
仿真建模时,利用统一地理高程数据源对山体、岸线、码头、桥梁、城市建筑和重要物标进行三维建模。为了表现出真实地形视觉空间真实感,采用基于卫星图片作为地形纹理进行映射和采用实际拍摄的港岸图片作为物标纹理进行映射。纹理空间与实体空间的映射实际是实现影像与对应地面之间在平面位置上的配准,其映射关系是一种仿射变换,如下公式:

(x,y)是任一点在影像中的坐标;(XT,YT)是对应地面点的平面位置;(ai,bi)为8个变换参数,依据像素地形图的四个角点即可求解出这8个变换参数,从而确定其映射关系。
三维港口及岛屿地形的制作及三维显示过程如图1所示。
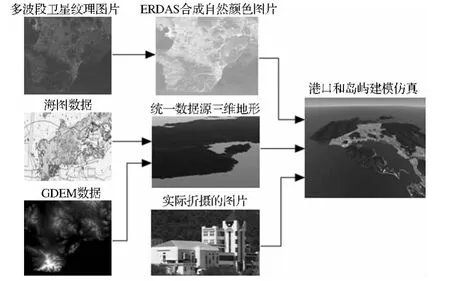
图1 海岸地形制作与显示的过程
2.2 海面模拟
海面网格的高程数据是基于Phillips海浪谱通过FFT计算获得的,可根据风向和风速形成不同的浪级[6]。
上述的海浪模型较适用于良好气象条件下海浪的模拟,其生成的海浪的波峰和波谷比较光滑。为获得更接近于实际条件下的海浪,简单地采用移动海浪网格水平位置的方法来改善海浪模型。
海浪网格移动后位置表达式为

其中,X(x,y)为水平位置点;λ为移动系数;D为采用FFT计算出的移动向量。采用此法生成的海浪轮廓浪尖尖锐,浪底平坦。
另外,当海面上波峰处水质点的圆周运动速度大于波速时,波浪破碎,就产生浪花。本文基于GPU绘制技术,利用GLSL着色语言形成海面光照和浪花效果。
2.3 动态天空构建与显示
天空视景模型是根据当前视点的经纬度,得到当地时间、时区、儒略日和恒星时,进而确定日、月等天体的位置[7],然后根据太阳的不同高度角用多重纹理和GLSL语言绘制逼真的动态天空。
如图2所示,天空盒采用12个四边形和1个六边形建立,绘制时,上面的六边形采用Triangle Fan方式进行绘制,而四周的四边形采用Triangle Trips的方式进行绘制。相对于球形天空盒和对于立方体天空盒来讲,这种方法是一个折中方案,它既保证绘制天空盒的速度,也保证了天空盒绘制的真实感。

图2 基于多边形天空几何模型
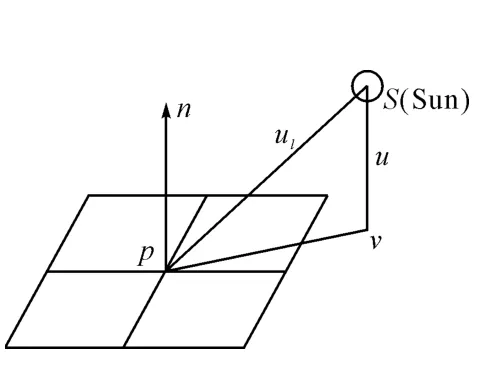
图3 基于观察点的局部坐标系
天空模型要根据当前视点的经纬度实时计算太阳的高低角和方位角。
如图3所示,设p点为当前视点,n为切平面的法向量,s为太阳在天球的位置点,v为太阳切平面上投影。所以切平面方程:

3 目标实体三维可视化
海战场环境中有许多复杂的战斗实体模型,单纯利用基本绘图语句建立对舰艇、潜艇、战斗机等模型并进行绘制,工作量大,周期长[8]。我们首先利用三维建模软件对目标实体进行三维建模,然后通过视景仿真程序进行控制与显示,具体过程如图4所示。
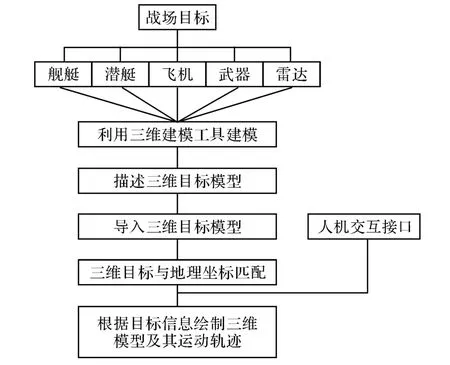
图4 三维目标可视化流程图
3.1 目标实体三维建模
目前广泛应用的建模软件如3DSMAX、AutoCAD、Creator等,用户根据物体的外观特点直接建立模型,而且可以精细地刻画物体的细节,不需要任何编程语句就可以实现。
我们选择Creator对舰艇、潜艇、飞机、各种武器和探测设备等虚拟物体进行3D建模,Creator生成3D模型几乎是“所见即所得”,同时设置LOD节点,DOF节点和SWITCH节点,提供给视景绘制程序使用。
3.2 模型显示控制
通过这些软件建立模型后,可以设置模型的初始运动状态,但不能根据用户的需要实时控制模型运动及显示状态。因此,我们在视景仿真程序通过图形绘制程序中的函数接口,控制模型及相应节点运动及显示状态。例如,观察者在本舰视点时(站在本舰的舰桥上进行观察),要求视景仿真程序关闭本舰舰桥显示,不然会出现显示遮挡问题;而在自由视点时(观察者脱离本舰在空中观察),又要显示舰桥,不然会出现舰艇没有舰桥的错误显示,如图5所示。
采用上述方法避免了用户利用程序来建立三维立体模型繁重而复杂的工作,构建的模型能体现更多的细节,又可以通过图形绘制程序实现对模型的人机交互控制。
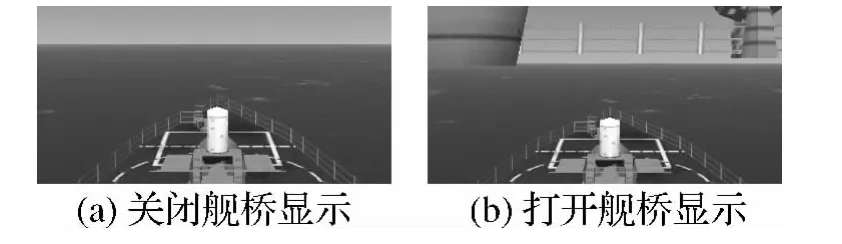
图5 在本舰视点时对本舰舰桥进行控制
4 战场特效
战场特效包括弹迹尾焰生成,爆炸烟火生成和爆炸水柱生成等,它们由无数外观形状极不规则的小颗粒随机运动而产生,并随时间而发生变化[9~10]。
4.1 数学描述
用数学的方法来描述粒子系统,是为了计算粒子系统变化过程中各个属性的量化值。对于爆炸特效的粒子系统来说,是指控制粒子在生命周期的运动特性,主要包括加速度、角速度、空气阻力、风力、重力等。
爆炸后产生的烟雾粒子属性为初始质量m;初始空间位置p0={x0,y0,z0};初始速度矢量v0={vx,vy,vz};初始加速度矢量a0={ax,ay,az};寿命life;颜色color;透明度alpha。
则经历Δt后烟雾粒子的位置变为

速度为

加速度矢量为

粒子在爆炸过程中除了直线或曲线运动外,还有绕{x,y,z}轴的旋转运动。假设粒子与{x,y,z}轴正向所成的角度分别为Pitch,Roll,Yaw,而绕{x,y,z}轴的转动角速度分别为:wx,wy,wz,则第fi帧时粒子与{x,y,z}轴所成的夹角为

4.2 绘制过程
实现基于粒子系统的爆炸特效需要如下几个步骤:1)创建粒子系统,设置大小、颜色、重量、生命周期、材质、ALPHA范围等相应属性,加入到场景中。
2)创建粒子系统放射器,包括计数器、放置器和发射器三部分。计数器控制每一帧产生的粒子数,放置器设置粒子的初始位置,发射器设置粒子的初始速度。
3)创建粒子操作器,控制粒子在生命周期的运动特性包括加速度、角速度、空气阻力、风力、重力。
4)创建粒子系统更新器,更新粒子,拣选“存活”粒子。
5)绘制“存活”粒子组成的图形,删除符合死亡条件的粒子。
5 仿真结果
由上述视景仿真方法生成的自然环境,多目标战术对抗及爆炸场景如图6所示。
图6显示了视景中自然环境仿真的结果,包括依据统一数据源建立的港口地形的显示,根据太阳高低角计算光照亮度的动态天空的显示,通过海浪谱形成的逼真海面的显示。图7显示了海战场多目标战术对抗及爆炸场景。包括舰艇编队组成场景以及导弹击中目标时爆炸场景。

图6 自然环境仿真效果图

图7 多目标战术对抗及爆炸场景
该视景仿真技术正在应用于某单舰防御系统,与传统的无视景相比,提高了显示的直观性、训练的交互性以及训练人员的积极性,使训练过程和结果更容易被训练人员记忆、理解和引发思考。
6 结语
舰艇战术对抗视景仿真技术通过对自然环境、动态目标和战场特效的模拟,构建了数据准确、视效逼真、更具现场感的三维可视化环境,可以为战术模拟的各阶段(预案拟订、对抗模拟、结果评估)提供准确、动态、直观、多角度的三维战场信息。下一步重点研究在复杂电磁环境下,对电子战武器使用效果和电磁环境进行三维可视化。
[1]庞国峰.虚拟战场理论研究与工程实践[M].北京:电子工业出版社,2010:10-15.
[2]赵宗贵,李君灵,王珂.战场态势估计概念、结构与效能[J].中国电子科学研究院学报,2010(3):226-230.
[3]张喜涛,姜昱明.可漫游的虚拟战场环境建模与实现[J].计算机仿真,2006,23(10):189-193.
[4]熊振南,周世波.船舶航行环境可视化仿真[J].上海海事大学学报,2009,30(1):6-9.
[5]扈震,杨之江,马振强.基于S257标准的电子海图三维可视化[J].中国地质大学学报,2010,35(3):421-424.
[6]Frechot J.Realistic simulation of ocean surface using wave spectra[C]//Proceedings of the First International Conference on Computer Graphics Theory and Applications,Setubal,2006:76-83.
[7]尹勇,江杰.航海模拟器中星空视景的建模与仿真[J].大连海事天学学报,2007,33(4):42-46.
[8]明芳.海战场三维态势可视化技术研究[D].武汉:中国舰船研究院,2011:31-37.
[9]范乃梅,马军霞.基于粒子系统的烟雾和爆炸模拟[J].郑州轻工业学院学报(自然科学报),2009,24(5):78-79.
[10]刘征宇,翟永翠.海战场视景实时生成技术研究[J].指挥控制与仿真,2010,32(4):61-65.
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
幼儿园(2021年13期)2021-12-02
小读者(2021年2期)2021-11-23
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
小哥白尼(军事科学)(2021年10期)2021-02-12
意林(2020年20期)2020-11-06
书香两岸(2020年3期)2020-06-29
火力与指挥控制(2020年2期)2020-04-02
计算机测量与控制(2018年7期)2018-07-27
舰船科学技术(2015年8期)2015-02-27
