一种被动雷达系统测向处理机设计及技术实现*
2013-10-16 08:05刘博祁岭
舰船电子工程 2013年1期
刘 博 祁 岭
(1.海装航空技术保障部 北京 100071)(2.海军驻洛阳地区航空军事代表室 洛阳 471009)
1 引言
随着现代电子战场电磁环境的日益复杂,为了可以精确攻击各种雷达目标,要求被动雷达测向系统拓宽频率覆盖范围,但这会带来被动测向系统如何从数量多、分布密度大、分布范围广、信号交叠严重的复杂信号环境中准确地提取出辐射源目标的问题[2],本文根据实际工程应用中被动测向技术面临的问题,研究了一种采用DSP+FPGA+FLASH结构的被动雷达测向处理机,对天线信号实际相位差的恢复、延迟线的控制、通道不平衡性的校正方法[3]等测角关键技术进行深入研究,并阐述了其硬件实现框图和工作流程,较好地实现了被动雷达中至关重要的角度测量和控制等工作。
2 系统概述
该雷达测向处理机设计基于反辐射导弹等载体的被动雷达信息处理系统,雷达系统由信号分选跟踪机、窄带数字接收机及测向处理机三部分组成[4],测向处理器接收信号跟踪分机输出的宽波门、信号流及载频码信息、窄带数字接收机输出的预处理数据,对接收的数据进行处理并将处理所得控制延迟线信号输出给控制系统和窄带数字接收机,通过与信号分选处理分机的数据接口,将处理所得角度信息输出到信号分选跟踪分机。通过各分机的数据处理和分机间通信,即可完成辐射源信息采集与处理,并输出控制信息给雷达载体,完成对辐射源的跟踪。
3 测向处理机方案设计
3.1 测向处理机功能
测向处理分机完成闭环、开环测向算法、延迟线的数字控制并具有与信号分选跟踪机的通信功能:
1)闭环模式,即没有威胁目标的雷达数据库,被动雷达系统根据一定的算法,分析信号脉宽、载频、重频的规律,依据一定威胁判断准则找出威胁等级最高的雷达,然后通过跟踪器跟踪该部雷达,并给出跟踪波门[5]。在闭环模式下,由于对相位差的SIN函数的积分不涉及相位突变,可以采用硬件积分,硬件积分在窄带数字接收机中实现,以缩小测量到控制量的延时。测向处理机接收窄带接收机输出的雷达载体极坐标数字控制信号u′g后,输出9bit数字量去控制延迟线;将u′g进行D/A变换得到u′g的模拟量ug对雷达载体进行控制,同时将ug送到窄带数字接收机,用于接收机求取方位角信号αfw。
2)开环模式,即被动雷达系统根据预先装订的威胁目标雷达数据库进行分选和跟踪,并给出跟踪波门。在开环工作模式下,窄带数字接收机接收两路中频信号IF1、IF2,进行数字鉴相后,得到相位差Δφ,测向处理器对其进行数字积分得到数字信号u′g,通过求取u′g的极大极小值之差,即可求出信号与被动雷达载体夹角βy;通过比较模拟信号ug和参考信号ufRE之间的相位差,则可以求取αfw。根据方位角αfw和夹角βy,进行角度计算和转换,给出被动雷达载体偏航角θ、俯仰角φ的误差信号。
3)采用DSP之间的串口(McBSP)实现与分选处理机通信功能。
4)实现延迟线的数字控制。
3.2 系统接口示意图
测向处理机接口关系如图1所示。
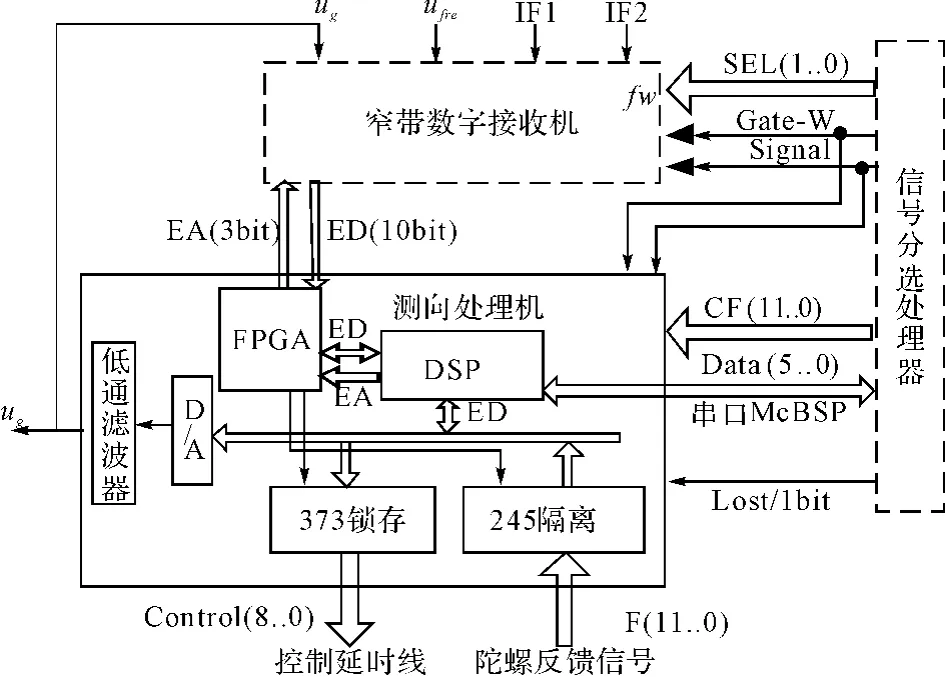
图1 测向处理机接口示意图
3.3 测角关键技术
3.3.1 两路信号实际相位差的确定
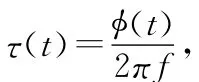
在开环和闭环两种测角方案中两路天线信号实际相位差的确定是关键技术。根据旋转式干涉仪测向公式

1)对鉴相器输出的相位差直接积分来恢复实际相位差
对鉴相器输出的相位差直接积分来恢复实际相位差,即指测向处理机对数字接收机输出的数字相位差信号直接进行积分从而恢复实际相位差值。(数字接收机将(-π,π)区间的信号进行9bit量化,量化精度为360/512=0.7031°)。由于信号的相位差是周期性变化的,只要脉冲重复周期足够高,以每两个脉冲期间的相位差变化值来判断相位变化的趋势是可行的[7]。如前所述,采用数字积分的方式就可以恢复出实际相位差。
(1)对数字接收机输出相位差进行数字积分恢复实际相位差
数字积分器的实现采用软件的方式,下面分析采用DSP软件实现数字积分方法。
当脉冲信号到来时,延迟一小段时间后数字接收机将输出被折叠到(-π,π)内的相位差信号,DSP在外部脉冲信号中断的控制下,将该相位差信号储存在相应的数组中。数字接收机输出的相位差信号在时序上是不连续的,但前后两次接收到的相位差的变化量可以确定[8]。因此DSP可以根据所有在一个周期内接收的相位差信号计算得到相应的每一次信号的累加值,两个数组如表1所示。
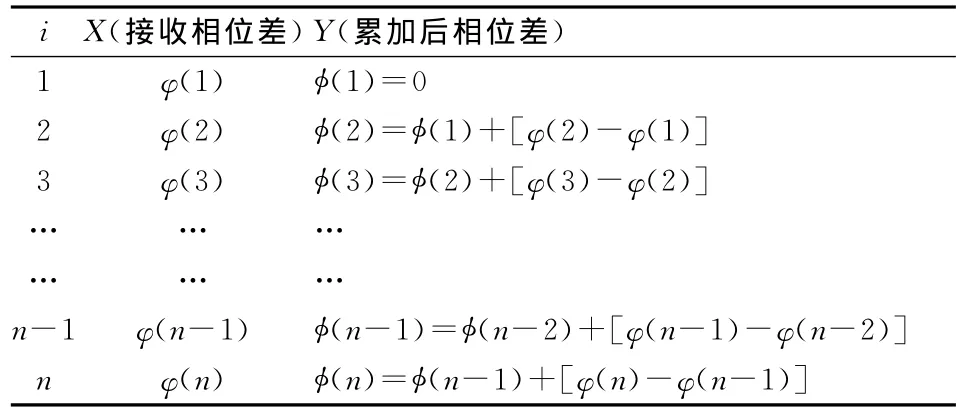
表1 软件数字积分数组变量对应关系
可见最大相位差必须在天线旋转一周以后才能获得,因此系统应给测向处理器预留一定的搜索时间。
因此根据最大相位差可以得到相应的最大延迟时间,延迟时间表示为

(2)限幅积分的必要性
由于积分起始点可能出现在旋转过程中的任意一个位置,因此积分的结果就不会总是以相位差为0的横轴线对称,可能会出现的情况如图2所示。
不能将该积分得到的相位差直接作为延迟线或被动雷达载体驾驶仪的控制信号,同时在开环系统中也要求积分结果相对于相位差为横轴线对称。必须通过限幅将曲线调整为对相位差为0轴对称后才可作为输出的控制信号。
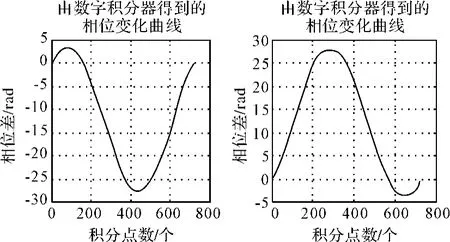
图2 数值积分初始值不同时积分输出曲线比较
根据在天线旋转第一圈内计算得到的最大相位差φmax,将该值作为限幅门限,即将后续积分结果都限制在[-φmax,φmax]范围内后再去控制延迟线。这个过程需要1个天线旋转周期T时间就可以调整完成。如图3所示。
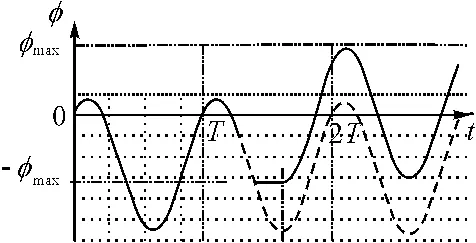
图3 限幅积分示意图
当限幅达到φ(t)关于横轴对称后,可以取消限幅功能,即使由于雷达载体扰动使夹角βy值变大,也不会再产生φ(t)关于横轴不对称的情况。
根据理论分析,在一个相位重叠周期(-π,π)内至少需要两个采样点数据才能够确定在这一周期内的变化规律[9],因此下面对恢复实际相位差时输入信号脉冲重复频率应满足的条件进行分析。
2)延迟线的控制
理论分析结果是延时线瞬时值具有和全相位φ(i)或ug一样的函数关系,即

由上式可以看出,用ug或φ(t)可以调整延时线,经分析延时线的控制方法有以下两种:
3)通道不平衡性的校正方法
(1)开环测角需采用精确的直流偏置测量技术。拟采用对模拟ug波形密集采样,用积分方法计算一个周期内的平均值,即为波形的直流偏置。计算出对应的不平衡相位误差Δφ,修正测量的全相位值,再计算角度。
(2)闭环直接输出ug到被动雷达载体驾驶仪,采用良好的带通滤波器滤除直流分量和由天线随弹体转动带来的随机相位变化,同时用精确的测量直流偏置的技术对输出ug进行测量,将其化为延时线误差,调整延时线消除此误差。
(3)列表补偿通道不一致性
在系统测试阶段,使βy=0°,记录各个频率点下系统测得的相位差作为该频点的通道误差校正值,将该测量结果以频率为地址偏移存储起来。在系统实际工作中根据信号的频率来查表找到该频率点下的系统通道误差校正值,对某频点下某角度测得的相位差进行校正。
3.3.2 开环算法中的相关问题分析
在开环算法中,关于控制量ug的处理方式与闭环跟踪法相同,不再叙述。
1)仰角βy的确定
2)对方位角αfw的确定
整个系统只采用两根天线,即两个接收通道。对中频接收机信号进行A/D采样,I、Q提取和计算两通道相位差,利用被动雷达载体旋转的数字积分来解模糊。数字积分是一个与雷达载体选转角速度ωr和信号与雷达载体轴夹角βy有关的余弦函数,即其周期为2π/ωr,幅度正比于两天线波程差(2πLsinβy/λ),其初始相差为αfw可用积分结果与参考信号比相来确定,这样就得到了XYZ坐标系下,方位角αfw和仰角βy信息,从而计算得到偏航角θ和俯仰角φ。
获取αfw的关键在于要对ufre、ug同步采样。由于天线旋转频率较低,对于ufre、ug的采样不需要很高的采样速率[11]。但是由于系统对相位差进行数字积分有一定的延时,且ug是积分后数字量经D/A变换后得到的模拟量,因此ufre、ug在时间上会存在一固定的微小误差。由于天线旋转速度仅为10Hz,ug在时间上的微小误差可以忽略。
3)偏航角和俯仰角度计算
根据前面处理的得到的βy,αfw可以计算出偏航角θ和俯仰角φ。数学表达式为:tanθ=cotβsinα,tanφ=cotβcosα。式中β=90°-βy,α=αfw。
根据偏航角和俯仰角的正切函数值查表或计算可以得到相应的偏航角θ、俯仰角φ。数据由测向DSP经McBSP串口送到分选处理器,由分选处理器将该数据上报。
3.4 测向处理器的工作流程图
根据前面的分析过程,测向处理器的DSP的主工作流程设计如图4。
4 结语
本文提出了一种工程上实用的测向处理机设计方案,采用高速采样ADC、高性能FPGA芯片和软件无线电思想[13],系统先进,集成度高,基于本设计思想开发的测向处理机已在某被动雷达信息处理系统中试用,具有实时处理性强、可靠稳定的优点。
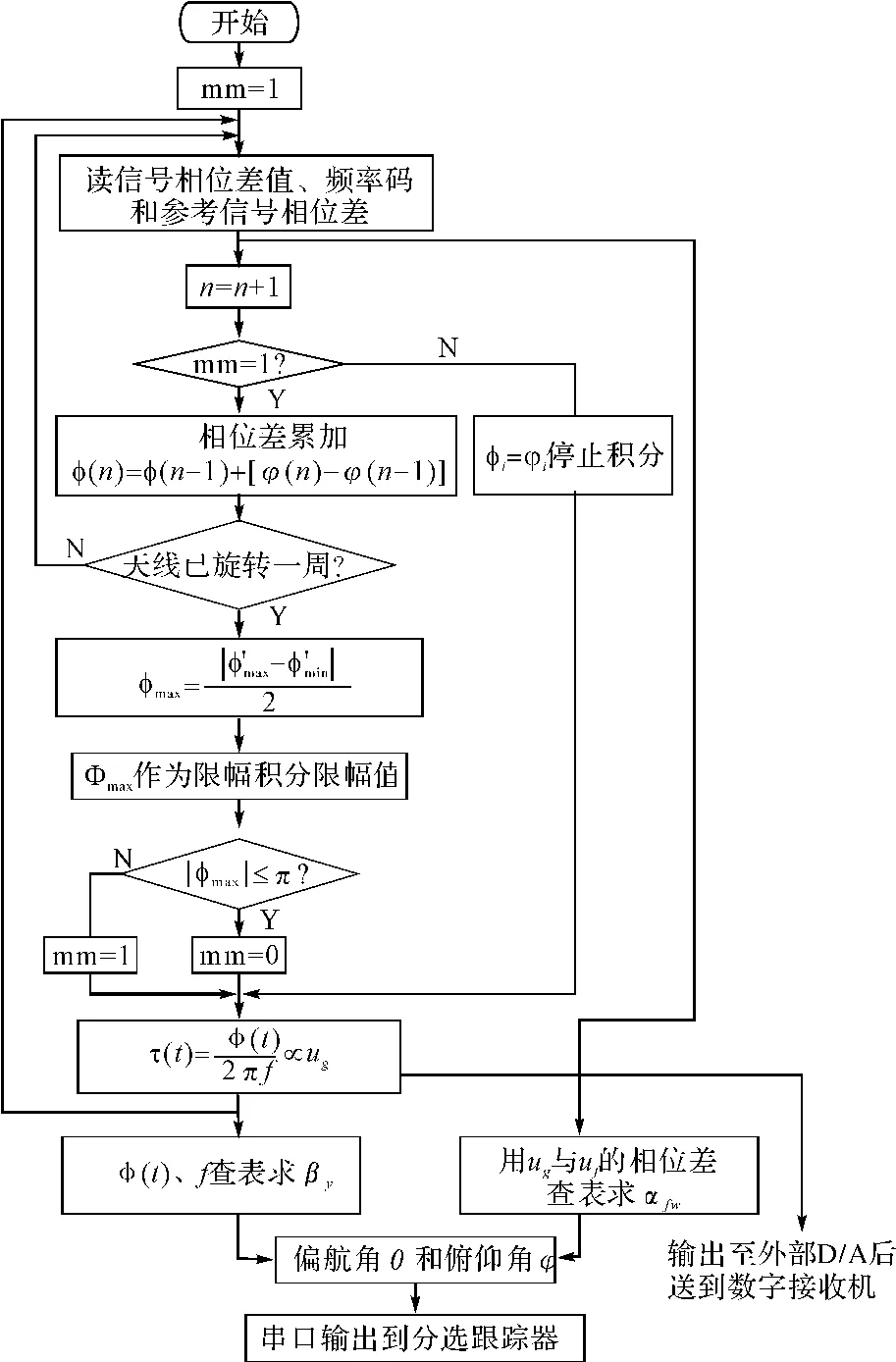
图4 测向处理器工作流程
[1]赵沧波,刁鸣.被动雷达测向系统信号处理器的设计[J].应用科技,2005,32(2):9-11.
[2]李绍滨,林磊.利用窄带接收机实现对宽带雷达信号测向[J].系统工程与电子技术,2006,28(12):18-20.
[3]于俊莲,司锡才.雷达测向技术研究[J].信息技术,2009,33(2):50-53.
[4]司锡才,赵建民.宽频带反辐射导弹导引头技术基础[M].哈尔滨:哈尔滨工程大学出版社,1996,9-10.
[5]赵国庆.雷达对抗原理[M].西安:西安电子科技大学,1999,111-112.
[6]Mark A.Richards.雷达信号处理基础[M].北京:电子工业出版社,2008,213-214.
[7]Skolnik M.I.雷达手册[M].北京:电子工业出版社,2003,76-77.
[8]孙宏利.雷达接收机数字化分析[J].无线电工程,2011,41(3):25-27.
[9]秦军振.外辐射源雷达系统的测向及定位算法研究[D].西安电子科技大学,2009,33-34.
[10]ELINT:The Interception and Analysis of Radar Signals[M].BeiJing:Publishing House of Electrnics Industry,2008,221-223.
[11]Chan h C.Radar sea-clutter at low grazing angles[J].IEE Proc.-F,1990,137(2):102-112.
[12]顾晶,何昇浍.一种基于形态滤波的雷达目标检测方法[J].计算机与数字工程,2012(2).
[13]韩慧奇.模块化FPGA设计在某雷达接收机中的应用[J].电子技术,2009,51(9);33-35.
猜你喜欢
工业设计(2021年4期)2021-05-11
天津外国语大学学报(2021年1期)2021-03-29
河北农机(2020年10期)2020-12-14
VOGUE服饰与美容(2020年5期)2020-09-03
趣味(语文)(2019年5期)2019-09-02
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
电子技术与软件工程(2017年15期)2018-01-30
电子制作(2017年20期)2017-04-26
电子制作(2017年19期)2017-02-02